 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnvelopes and Waves: Safe Multivehicle Collision Avoidance for Horizontal Non-deterministic Turns
May 10, 2022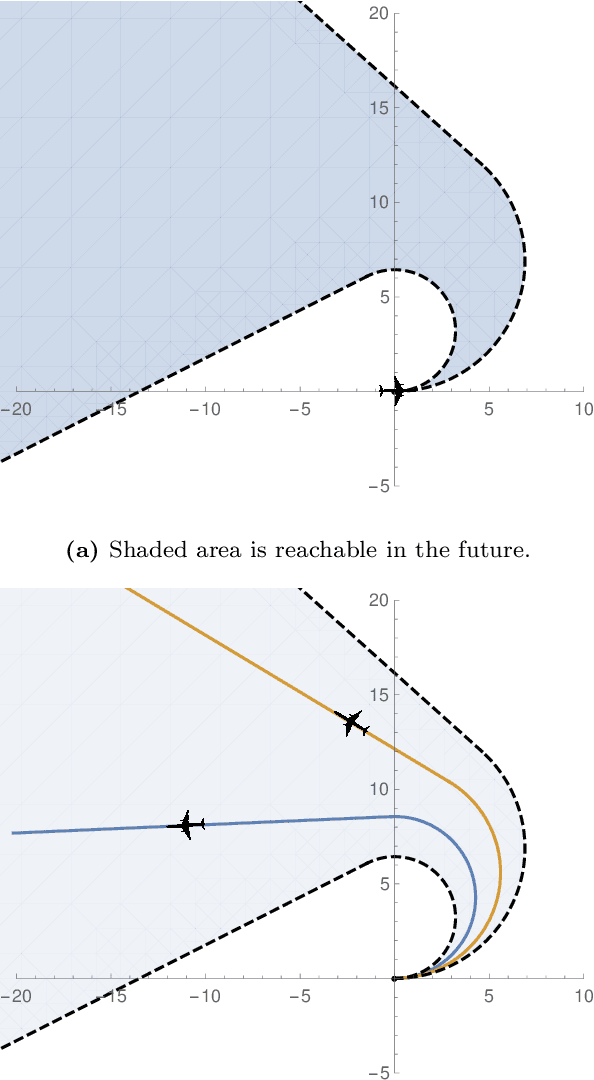
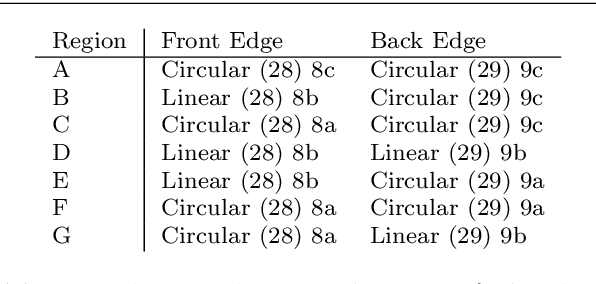
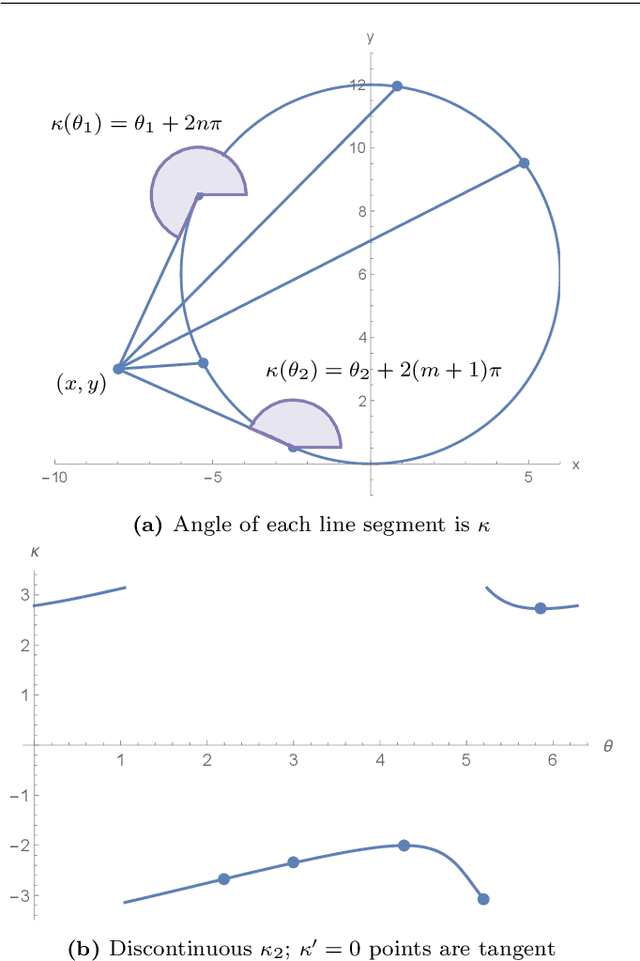
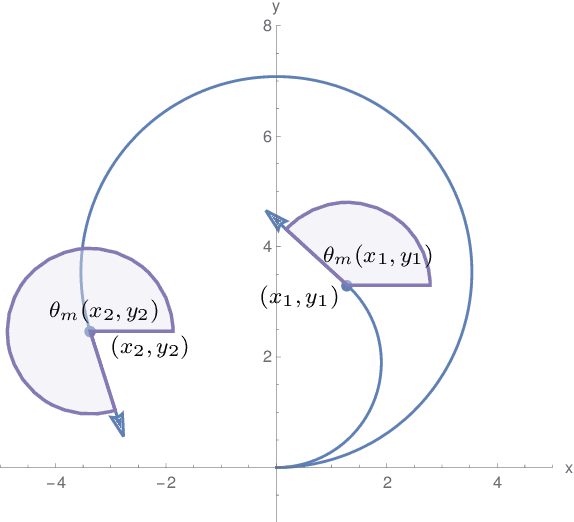
We present an approach to analyzing the safety of asynchronous, independent, non-deterministic, turn-to-bearing horizontal maneuvers for two vehicles. Future turn rates, final bearings, and continuously varying ground speeds throughout the encounter are unknown but restricted to known ranges. We develop a library of formal proofs about turning kinematics, and apply the library to create a formally verified timing computation. Additionally, we create a technique that evaluates future collision possibilities that is based on waves of position possibilities and relies on the timing computation. The result either determines that the encounter will be collision-free, or computes a safe overapproximation for when and where collisions may occur.
* Coq proofs are at https://bitbucket.org/ykouskoulas/ottb-foundation-proofs; Accepted 08 Mar 2022 (International Journal on Software Tools for Technology Transfer)
Incorrect by Construction: Fine Tuning Neural Networks for Guaranteed Performance on Finite Sets of Examples
Aug 03, 2020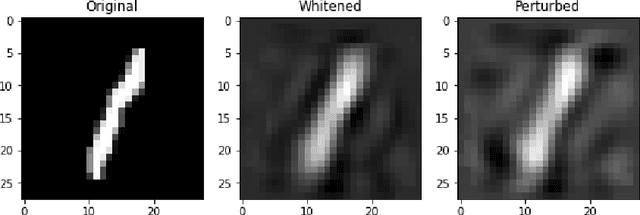

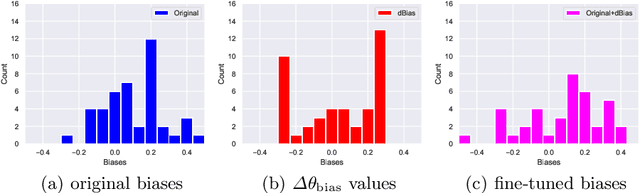
There is great interest in using formal methods to guarantee the reliability of deep neural networks. However, these techniques may also be used to implant carefully selected input-output pairs. We present initial results on a novel technique for using SMT solvers to fine tune the weights of a ReLU neural network to guarantee outcomes on a finite set of particular examples. This procedure can be used to ensure performance on key examples, but it could also be used to insert difficult-to-find incorrect examples that trigger unexpected performance. We demonstrate this approach by fine tuning an MNIST network to incorrectly classify a particular image and discuss the potential for the approach to compromise reliability of freely-shared machine learning models.
Adaptive Stress Testing: Finding Failure Events with Reinforcement Learning
Nov 06, 2018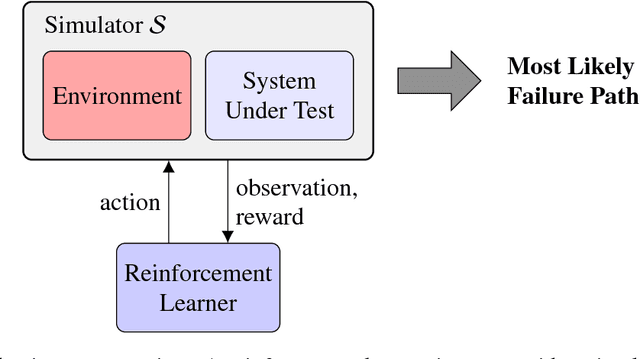
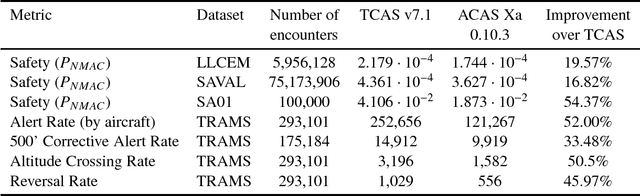
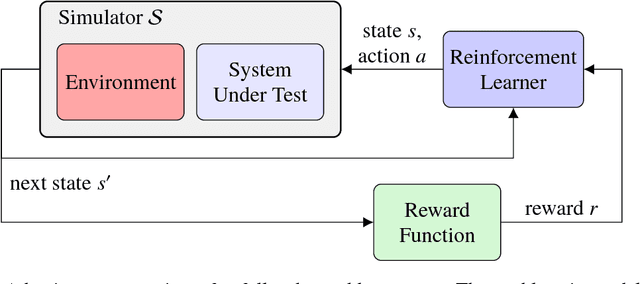
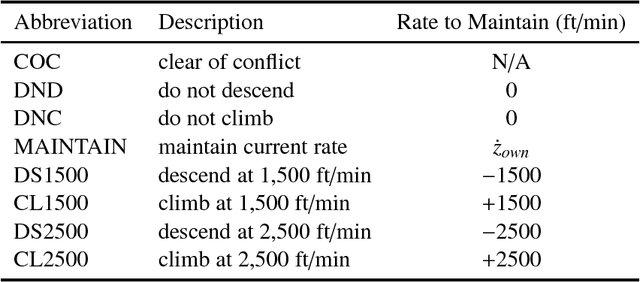
Finding the most likely path to a set of failure states is important to the analysis of safety-critical dynamic systems. While efficient solutions exist for certain classes of systems, a scalable general solution for stochastic, partially-observable, and continuous-valued systems remains challenging. Existing approaches in formal and simulation-based methods either cannot scale to large systems or are computationally inefficient. This paper presents adaptive stress testing (AST), a framework for searching a simulator for the most likely path to a failure event. We formulate the problem as a Markov decision process and use reinforcement learning to optimize it. The approach is simulation-based and does not require internal knowledge of the system. As a result, the approach is very suitable for black box testing of large systems. We present formulations for both systems where the state is fully-observable and partially-observable. In the latter case, we present a modified Monte Carlo tree search algorithm that only requires access to the pseudorandom number generator of the simulator to overcome partial observability. We also present an extension of the framework, called differential adaptive stress testing (DAST), that can be used to find failures that occur in one system but not in another. This type of differential analysis is useful in applications such as regression testing, where one is concerned with finding areas of relative weakness compared to a baseline. We demonstrate the effectiveness of the approach on an aircraft collision avoidance application, where we stress test a prototype aircraft collision avoidance system to find high-probability scenarios of near mid-air collisions.