 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniversal Semantic Disentangled Privacy-preserving Speech Representation Learning
May 19, 2025


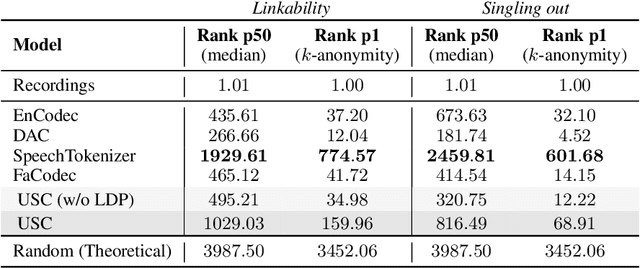
The use of audio recordings of human speech to train LLMs poses privacy concerns due to these models' potential to generate outputs that closely resemble artifacts in the training data. In this study, we propose a speaker privacy-preserving representation learning method through the Universal Speech Codec (USC), a computationally efficient encoder-decoder model that disentangles speech into: $\textit{(i)}$ privacy-preserving semantically rich representations, capturing content and speech paralinguistics, and $\textit{(ii)}$ residual acoustic and speaker representations that enables high-fidelity reconstruction. Extensive evaluations presented show that USC's semantic representation preserves content, prosody, and sentiment, while removing potentially identifiable speaker attributes. Combining both representations, USC achieves state-of-the-art speech reconstruction. Additionally, we introduce an evaluation methodology for measuring privacy-preserving properties, aligning with perceptual tests. We compare USC against other codecs in the literature and demonstrate its effectiveness on privacy-preserving representation learning, illustrating the trade-offs of speaker anonymization, paralinguistics retention and content preservation in the learned semantic representations. Audio samples are shared in $\href{https://www.amazon.science/usc-samples}{https://www.amazon.science/usc-samples}$.
Reward Function Optimization of a Deep Reinforcement Learning Collision Avoidance System
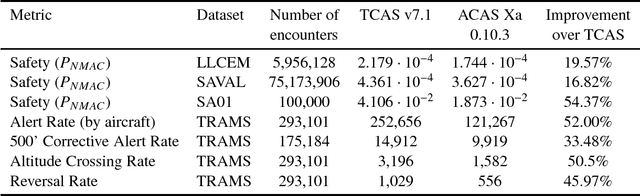
Dec 01, 2022The proliferation of unmanned aircraft systems (UAS) has caused airspace regulation authorities to examine the interoperability of these aircraft with collision avoidance systems initially designed for large transport category aircraft. Limitations in the currently mandated TCAS led the Federal Aviation Administration to commission the development of a new solution, the Airborne Collision Avoidance System X (ACAS X), designed to enable a collision avoidance capability for multiple aircraft platforms, including UAS. While prior research explored using deep reinforcement learning algorithms (DRL) for collision avoidance, DRL did not perform as well as existing solutions. This work explores the benefits of using a DRL collision avoidance system whose parameters are tuned using a surrogate optimizer. We show the use of a surrogate optimizer leads to DRL approach that can increase safety and operational viability and support future capability development for UAS collision avoidance.
Collision Risk and Operational Impact of Speed Change Advisories as Aircraft Collision Avoidance Maneuvers
Apr 29, 2022
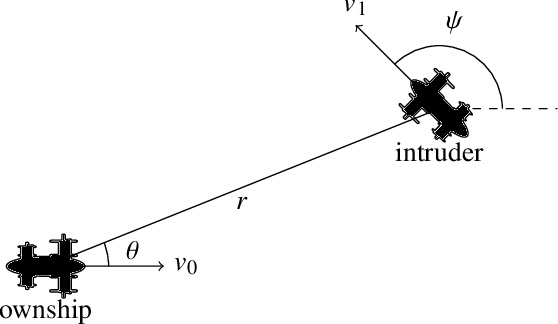
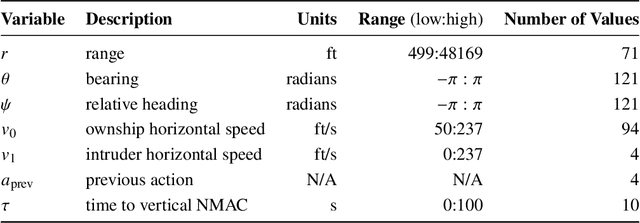
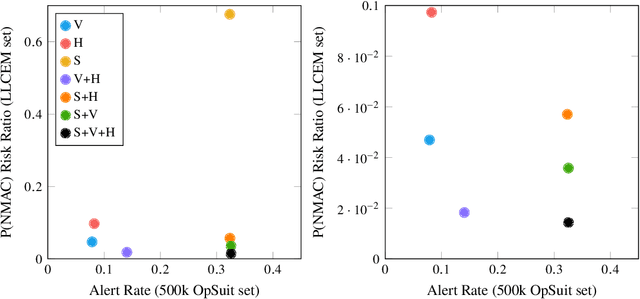
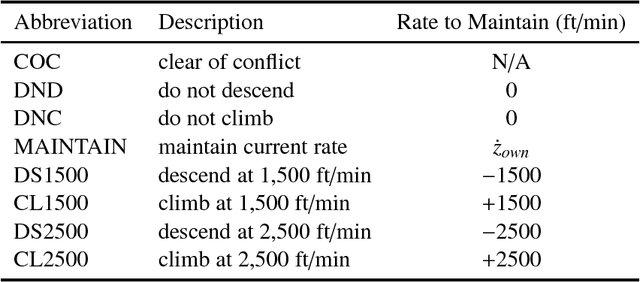
Aircraft collision avoidance systems have long been a key factor in keeping our airspace safe. Over the past decade, the FAA has supported the development of a new family of collision avoidance systems called the Airborne Collision Avoidance System X (ACAS X), which model the collision avoidance problem as a Markov decision process (MDP). Variants of ACAS X have been created for both manned (ACAS Xa) and unmanned aircraft (ACAS Xu and ACAS sXu). The variants primarily differ in the types of collision avoidance maneuvers they issue. For example, ACAS Xa issues vertical collision avoidance advisories, while ACAS Xu and ACAS sXu allow for horizontal advisories due to reduced aircraft performance capabilities. Currently, a new variant of ACAS X, called ACAS Xr, is being developed to provide collision avoidance capability to rotorcraft and Advanced Air Mobility (AAM) vehicles. Due to the desire to minimize deviation from the prescribed flight path of these aircraft, speed adjustments have been proposed as a potential collision avoidance maneuver for aircraft using ACAS Xr. In this work, we investigate the effect of speed change advisories on the safety and operational efficiency of collision avoidance systems. We develop an MDP-based collision avoidance logic that issues speed advisories and compare its performance to that of horizontal and vertical logics through Monte Carlo simulation on existing airspace encounter models. Our results show that while speed advisories are able to reduce collision risk, they are neither as safe nor as efficient as their horizontal and vertical counterparts.
Adaptive Stress Testing: Finding Failure Events with Reinforcement Learning
Nov 06, 2018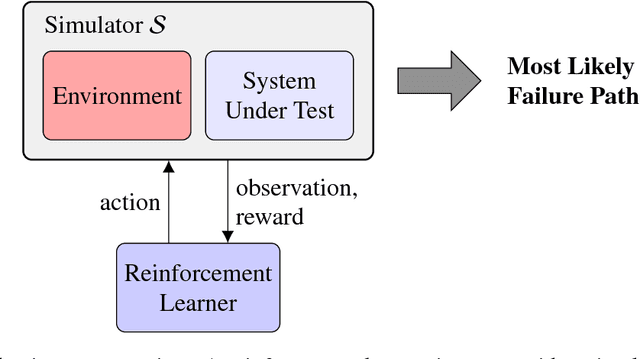
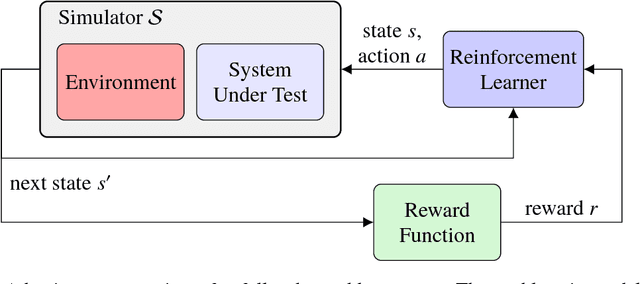
Finding the most likely path to a set of failure states is important to the analysis of safety-critical dynamic systems. While efficient solutions exist for certain classes of systems, a scalable general solution for stochastic, partially-observable, and continuous-valued systems remains challenging. Existing approaches in formal and simulation-based methods either cannot scale to large systems or are computationally inefficient. This paper presents adaptive stress testing (AST), a framework for searching a simulator for the most likely path to a failure event. We formulate the problem as a Markov decision process and use reinforcement learning to optimize it. The approach is simulation-based and does not require internal knowledge of the system. As a result, the approach is very suitable for black box testing of large systems. We present formulations for both systems where the state is fully-observable and partially-observable. In the latter case, we present a modified Monte Carlo tree search algorithm that only requires access to the pseudorandom number generator of the simulator to overcome partial observability. We also present an extension of the framework, called differential adaptive stress testing (DAST), that can be used to find failures that occur in one system but not in another. This type of differential analysis is useful in applications such as regression testing, where one is concerned with finding areas of relative weakness compared to a baseline. We demonstrate the effectiveness of the approach on an aircraft collision avoidance application, where we stress test a prototype aircraft collision avoidance system to find high-probability scenarios of near mid-air collisions.