 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploiting Large Neuroimaging Datasets to Create Connectome-Constrained Approaches for more Robust, Efficient, and Adaptable Artificial Intelligence
May 26, 2023Despite the progress in deep learning networks, efficient learning at the edge (enabling adaptable, low-complexity machine learning solutions) remains a critical need for defense and commercial applications. We envision a pipeline to utilize large neuroimaging datasets, including maps of the brain which capture neuron and synapse connectivity, to improve machine learning approaches. We have pursued different approaches within this pipeline structure. First, as a demonstration of data-driven discovery, the team has developed a technique for discovery of repeated subcircuits, or motifs. These were incorporated into a neural architecture search approach to evolve network architectures. Second, we have conducted analysis of the heading direction circuit in the fruit fly, which performs fusion of visual and angular velocity features, to explore augmenting existing computational models with new insight. Our team discovered a novel pattern of connectivity, implemented a new model, and demonstrated sensor fusion on a robotic platform. Third, the team analyzed circuitry for memory formation in the fruit fly connectome, enabling the design of a novel generative replay approach. Finally, the team has begun analysis of connectivity in mammalian cortex to explore potential improvements to transformer networks. These constraints increased network robustness on the most challenging examples in the CIFAR-10-C computer vision robustness benchmark task, while reducing learnable attention parameters by over an order of magnitude. Taken together, these results demonstrate multiple potential approaches to utilize insight from neural systems for developing robust and efficient machine learning techniques.
Detecting Anomalous Swarming Agents with Graph Signal Processing
Mar 17, 2021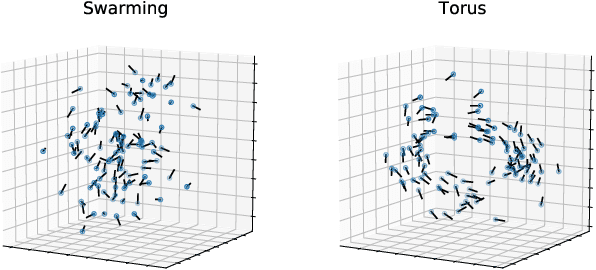
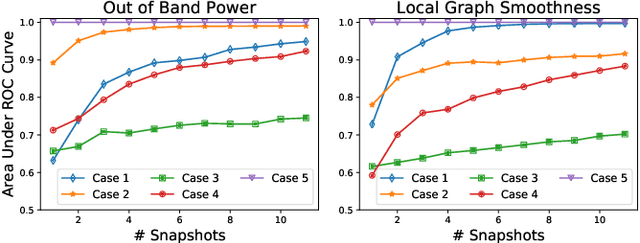
Collective motion among biological organisms such as insects, fish, and birds has motivated considerable interest not only in biology but also in distributed robotic systems. In a robotic or biological swarm, anomalous agents (whether malfunctioning or nefarious) behave differently than the normal agents and attempt to hide in the "chaos" of the swarm. By defining a graph structure between agents in a swarm, we can treat the agents' properties as a graph signal and use tools from the field of graph signal processing to understand local and global swarm properties. Here, we leverage this idea to show that anomalous agents can be effectively detected using their impacts on the graph Fourier structure of the swarm.
Analyzing Collective Motion Using Graph Fourier Analysis
Mar 15, 2021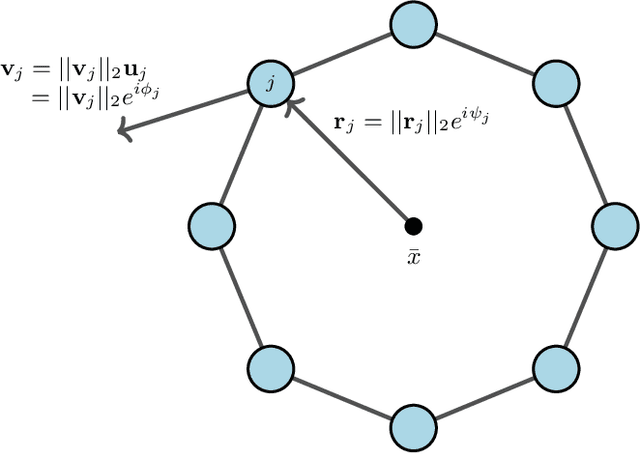
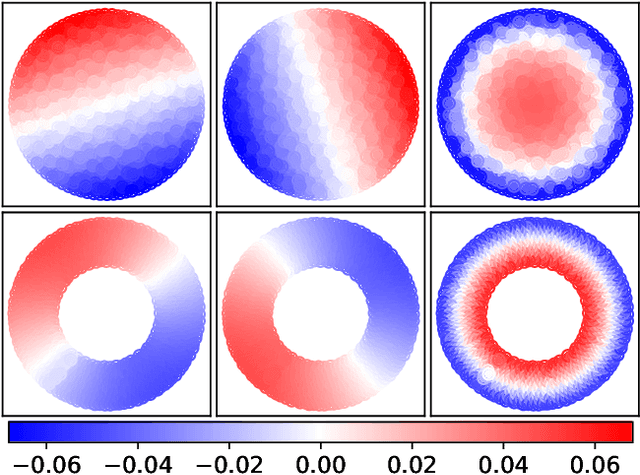
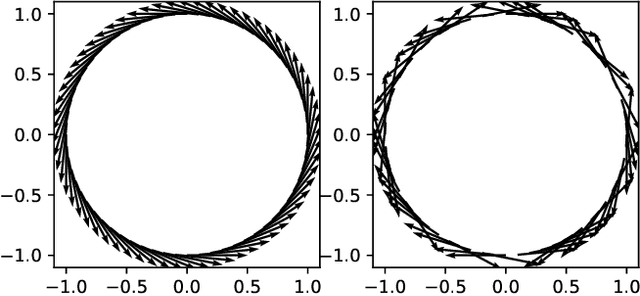
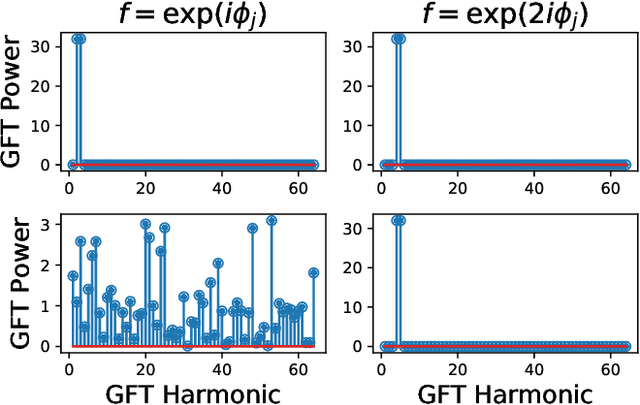
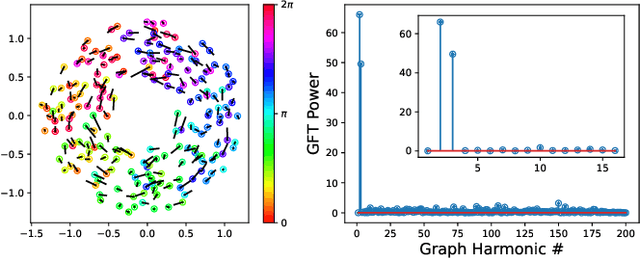
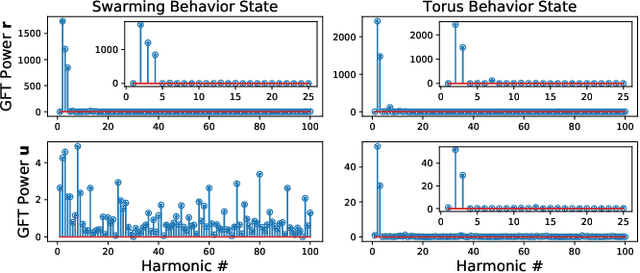
Collective motion in animal groups, such as swarms of insects, flocks of birds, and schools of fish, are some of the most visually striking examples of emergent behavior. Empirical analysis of these behaviors in experiment or computational simulation primarily involves the use of "swarm-averaged" metrics or order parameters such as velocity alignment and angular momentum. Recently, tools from computational topology have been applied to the analysis of swarms to further understand and automate the detection of fundamentally different swarm structures evolving in space and time. Here, we show how the field of graph signal processing can be used to fuse these two approaches by collectively analyzing swarm properties using graph Fourier harmonics that respect the topological structure of the swarm. This graph Fourier analysis reveals hidden structure in a number of common swarming states and forms the basis of a flexible analysis framework for collective motion.