 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Reconfigurable Intelligent Surfaces for the Millimeter-Wave Frequency Band: System Design and Measurement
Jun 07, 2023



Reconfigurable intelligent surfaces (RISs) will play a key role to establish millimeter wave (mmWave) ultra-reliable low-latency communication systems for sixth-generation (6G) applications. Currently, there are a few working prototypes of RISs operating in the mmWave frequency band and all of them are based on passive reflective elements. However, to fabricate an efficiently working RIS at mmWave frequencies, it is crucial to take care of the strong signal attenuation, reflective element losses and undesired radio frequency (RF) circuit effects. In this paper, we provide measurement campaign results for an active RIS in the mmWave frequency band as well as its analysis and system design. The obtained results demonstrate that an active RIS outperforms a RIS working in passive mode and provides a higher signal-to-noise-ratio (SNR). The active RIS consists of active reflective elements that amplify the impinging signal and reflect the signal to the desired beam direction. To obtain an efficient RIS in terms of power consumption and RIS state switch time, we design a hexagonal RIS with 37 elements working at 26 GHz. These elements are designed to work whether in passive state (binary phase shifting) or in active state (switch OFF or amplifying). We provide a comparison between the performance of a RIS working in passive and active mode using numerical simulations and empirical measurements. This comparison reveals that the active reflective intelligent surface (RIS) provides a received power that is at least 4 dB higher than that of the equivalent passive RIS. These results demonstrate the strong advantage of using active RISs for future ultra-reliable low-latency wireless communications.
Chance-Constrained Trajectory Optimization for High-DOF Robots in Uncertain Environments
Jan 31, 2023



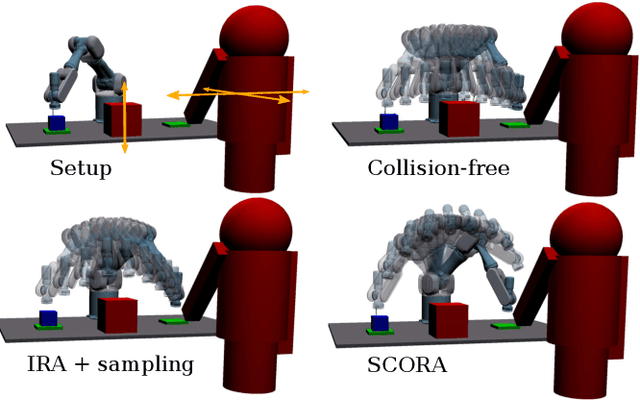
Many practical applications of robotics require systems that can operate safely despite uncertainty. In the context of motion planning, two types of uncertainty are particularly important when planning safe robot trajectories. The first is environmental uncertainty -- uncertainty in the locations of nearby obstacles, stemming from sensor noise or (in the case of obstacles' future locations) prediction error. The second class of uncertainty is uncertainty in the robots own state, typically caused by tracking or estimation error. To achieve high levels of safety, it is necessary for robots to consider both of these sources of uncertainty. In this paper, we propose a risk-bounded trajectory optimization algorithm, known as Sequential Convex Optimization with Risk Optimization (SCORA), to solve chance-constrained motion planning problems despite both environmental uncertainty and tracking error. Through experiments in simulation, we demonstrate that SCORA significantly outperforms state-of-the-art risk-aware motion planners both in planning time and in the safety of the resulting trajectories.
Cooperative Task and Motion Planning for Multi-Arm Assembly Systems
Mar 04, 2022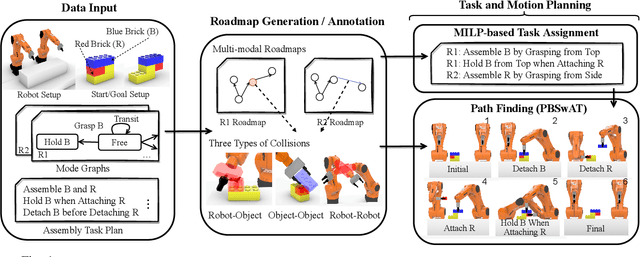
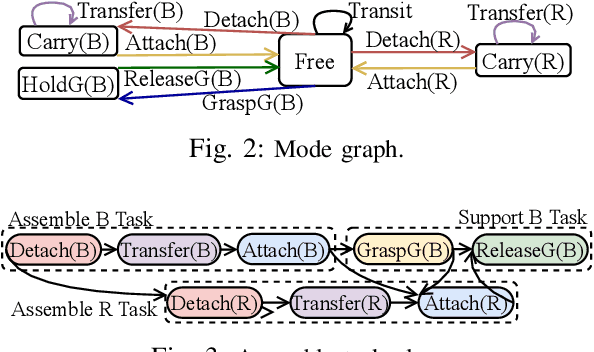
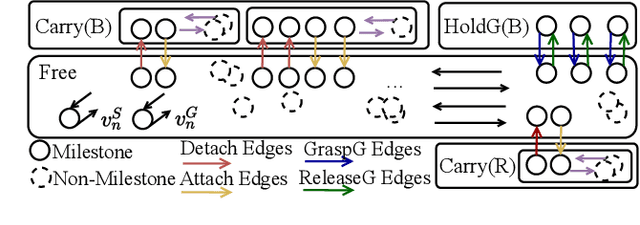
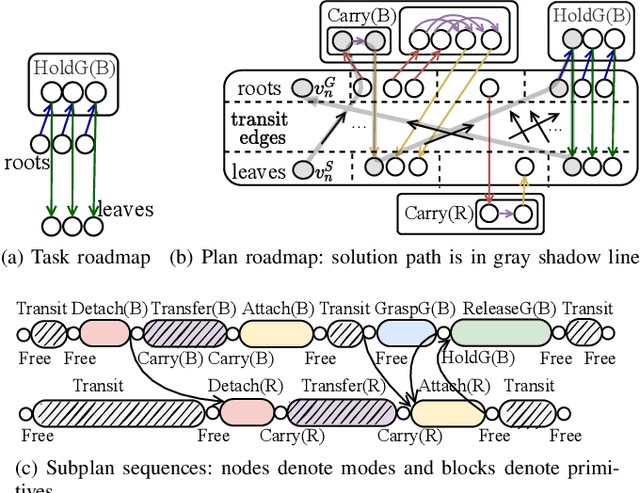
Multi-robot assembly systems are becoming increasingly appealing in manufacturing due to their ability to automatically, flexibly, and quickly construct desired structural designs. However, effectively planning for these systems in a manner that ensures each robot is simultaneously productive, and not idle, is challenging due to (1) the close proximity that the robots must operate in to manipulate the structure and (2) the inherent structural partial orderings on when each part can be installed. In this paper, we present a task and motion planning framework that jointly plans safe, low-makespan plans for a team of robots to assemble complex spatial structures. Our framework takes a hierarchical approach that, at the high level, uses Mixed-integer Linear Programs to compute an abstract plan comprised of an allocation of robots to tasks subject to precedence constraints and, at the low level, builds on a state-of-the-art algorithm for Multi-Agent Path Finding to plan collision-free robot motions that realize this abstract plan. Critical to our approach is the inclusion of certain collision constraints and movement durations during high-level planning, which better informs the search for abstract plans that are likely to be both feasible and low-makespan while keeping the search tractable. We demonstrate our planning system on several challenging assembly domains with several (sometimes heterogeneous) robots with grippers or suction plates for assembling structures with up to 23 objects involving Lego bricks, bars, plates, or irregularly shaped blocks.
Automatic Curricula via Expert Demonstrations
Jun 16, 2021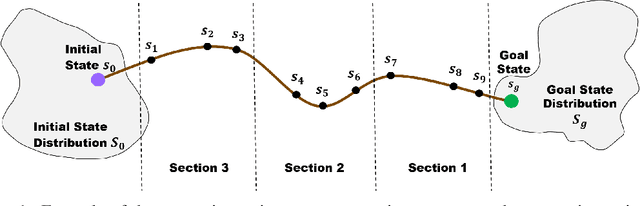
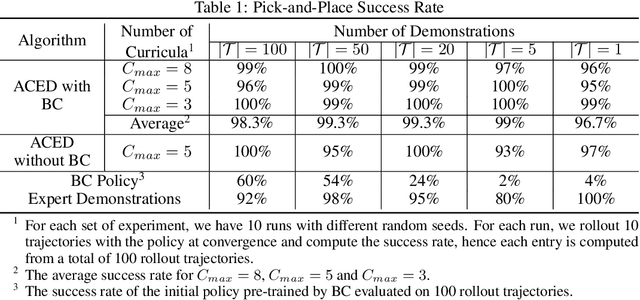
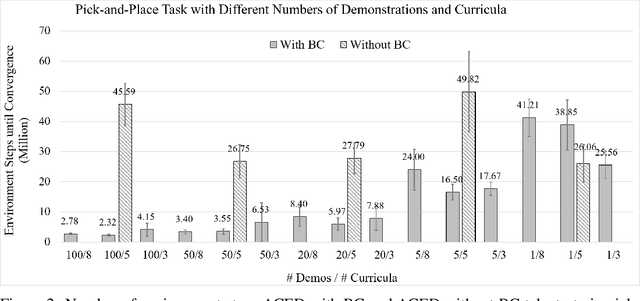
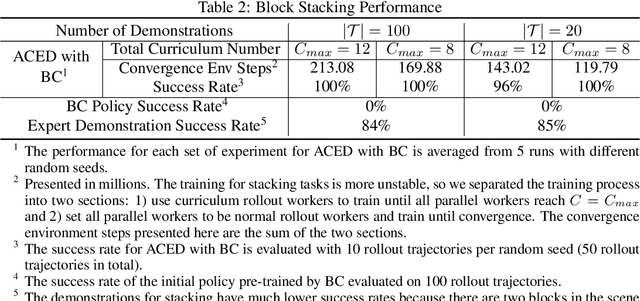
We propose Automatic Curricula via Expert Demonstrations (ACED), a reinforcement learning (RL) approach that combines the ideas of imitation learning and curriculum learning in order to solve challenging robotic manipulation tasks with sparse reward functions. Curriculum learning solves complicated RL tasks by introducing a sequence of auxiliary tasks with increasing difficulty, yet how to automatically design effective and generalizable curricula remains a challenging research problem. ACED extracts curricula from a small amount of expert demonstration trajectories by dividing demonstrations into sections and initializing training episodes to states sampled from different sections of demonstrations. Through moving the reset states from the end to the beginning of demonstrations as the learning agent improves its performance, ACED not only learns challenging manipulation tasks with unseen initializations and goals, but also discovers novel solutions that are distinct from the demonstrations. In addition, ACED can be naturally combined with other imitation learning methods to utilize expert demonstrations in a more efficient manner, and we show that a combination of ACED with behavior cloning allows pick-and-place tasks to be learned with as few as 1 demonstration and block stacking tasks to be learned with 20 demonstrations.
Fast-reactive probabilistic motion planning for high-dimensional robots
Dec 03, 2020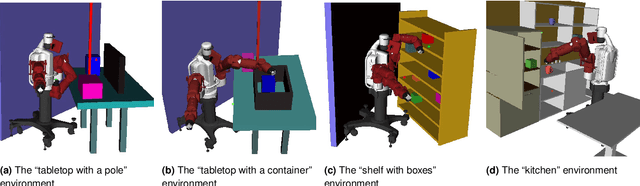
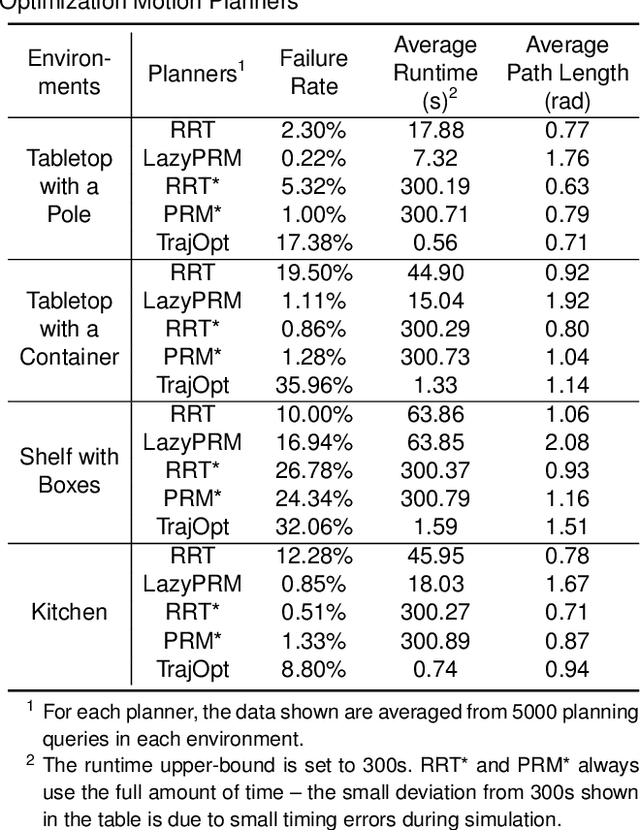
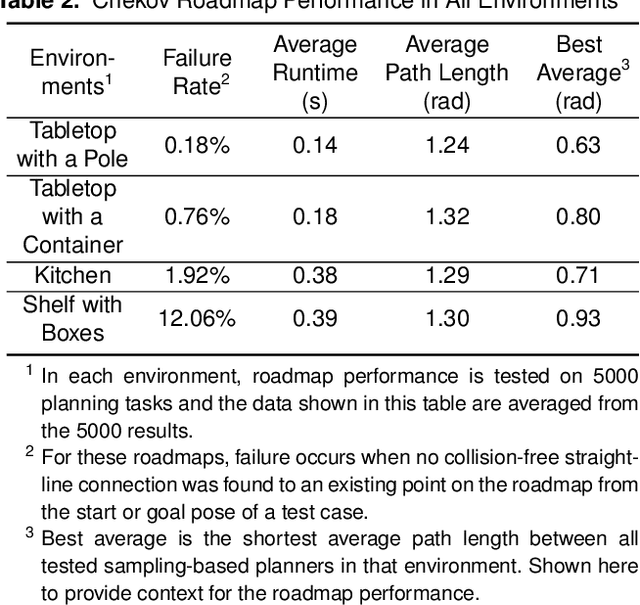
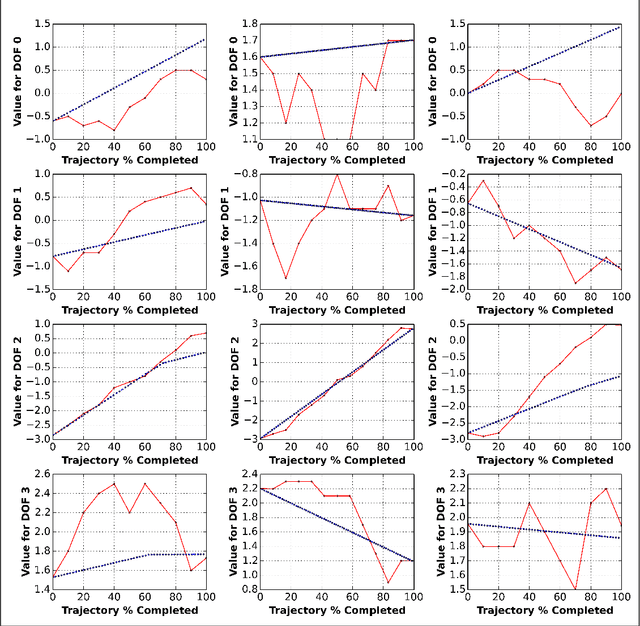
Many real-world robotic operations that involve high-dimensional humanoid robots require fast-reaction to plan disturbances and probabilistic guarantees over collision risks, whereas most probabilistic motion planning approaches developed for car-like robots can not be directly applied to high-dimensional robots. In this paper, we present probabilistic Chekov (p-Chekov), a fast-reactive motion planning system that can provide safety guarantees for high-dimensional robots suffering from process noises and observation noises. Leveraging recent advances in machine learning as well as our previous work in deterministic motion planning that integrated trajectory optimization into a sparse roadmap framework, p-Chekov demonstrates its superiority in terms of collision avoidance ability and planning speed in high-dimensional robotic motion planning tasks in complex environments without the convexification of obstacles. Comprehensive theoretical and empirical analysis provided in this paper shows that p-Chekov can effectively satisfy user-specified chance constraints over collision risk in practical robotic manipulation tasks.
An Empowerment-based Solution to Robotic Manipulation Tasks with Sparse Rewards
Oct 15, 2020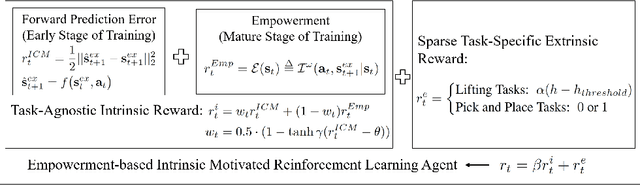
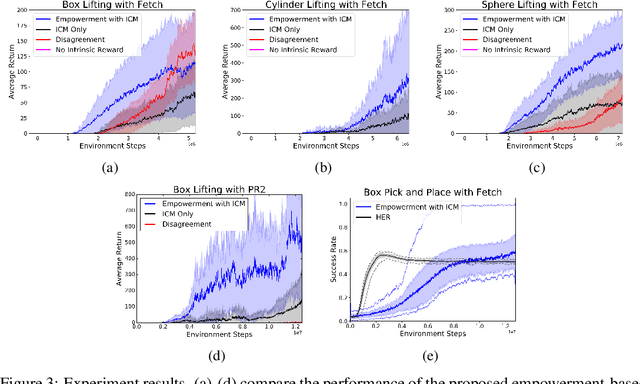
In order to provide adaptive and user-friendly solutions to robotic manipulation, it is important that the agent can learn to accomplish tasks even if they are only provided with very sparse instruction signals. To address the issues reinforcement learning algorithms face when task rewards are sparse, this paper proposes a novel form of intrinsic motivation that can allow robotic manipulators to learn useful manipulation skills with only sparse extrinsic rewards. Through integrating and balancing empowerment and curiosity, this approach shows superior performance compared to other existing intrinsic exploration approaches during extensive empirical testing. Qualitative analysis also shows that when combined with diversity-driven intrinsic motivations, this approach can help manipulators learn a set of diverse skills which could potentially be applied to other more complicated manipulation tasks and accelerate their learning process.
Provably Safe Trajectory Optimization in the Presence of Uncertain Convex Obstacles
Mar 17, 2020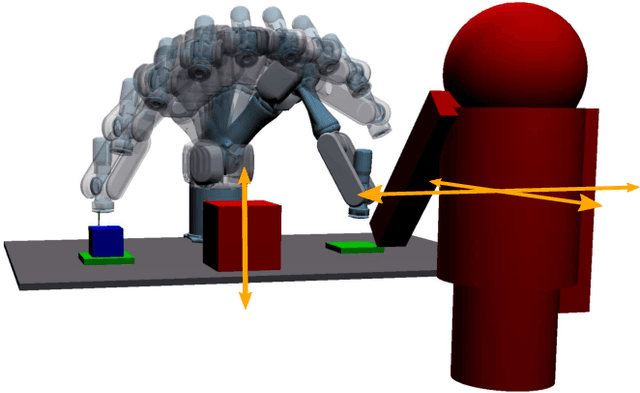
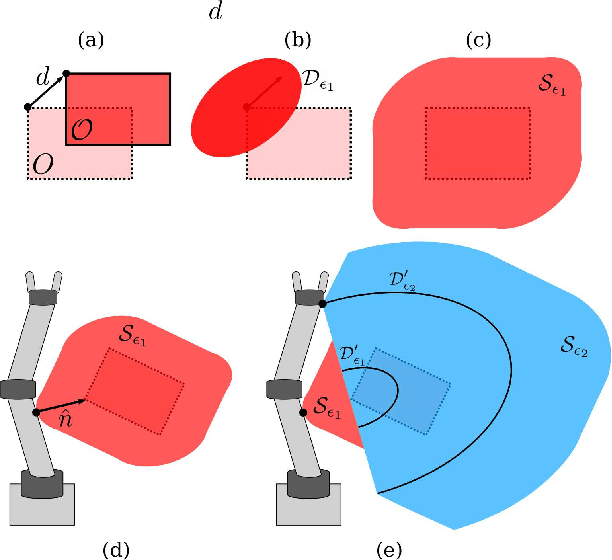
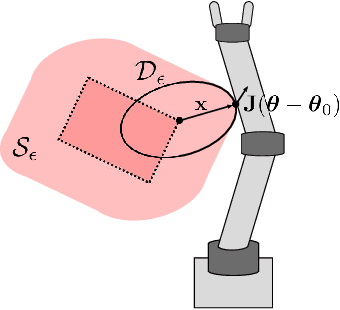
Real-world environments are inherently uncertain, and to operate safely in these environments robots must be able to plan around this uncertainty. In the context of motion planning, we desire systems that can maintain an acceptable level of safety as the robot moves, even when the exact locations of nearby obstacles are not known. In this paper, we solve this chance-constrained motion planning problem using a sequential convex optimization framework. To constrain the risk of collision incurred by planned movements, we employ geometric objects called $\epsilon$-shadows to compute upper bounds on the risk of collision between the robot and uncertain obstacles. We use these $\epsilon$-shadow-based estimates as constraints in a nonlinear trajectory optimization problem, which we then solve by iteratively linearizing the non-convex risk constraints. This sequential optimization approach quickly finds trajectories that accomplish the desired motion while maintaining a user-specified limit on collision risk. Our method can be applied to robots and environments with arbitrary convex geometry; even in complex environments, it runs in less than a second and provides provable guarantees on the safety of planned trajectories, enabling fast, reactive, and safe robot motion in realistic environments.
Fast Certification of Collision Probability Bounds with Uncertain Convex Obstacles
Mar 17, 2020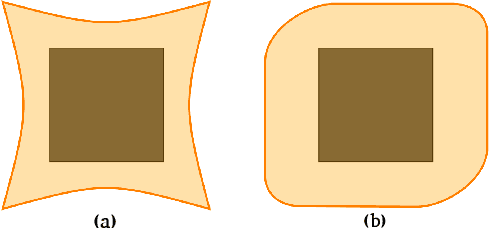
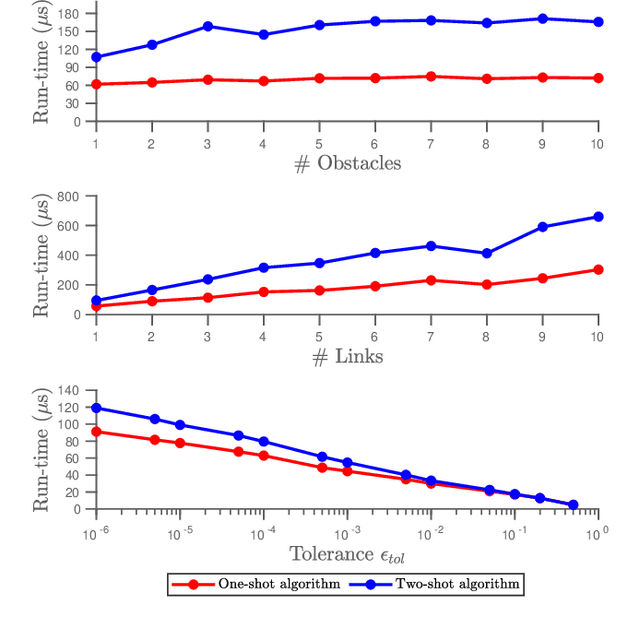
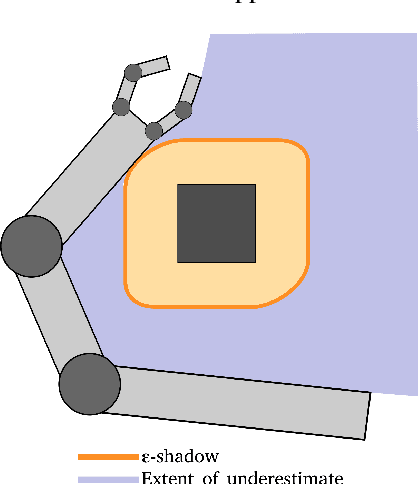
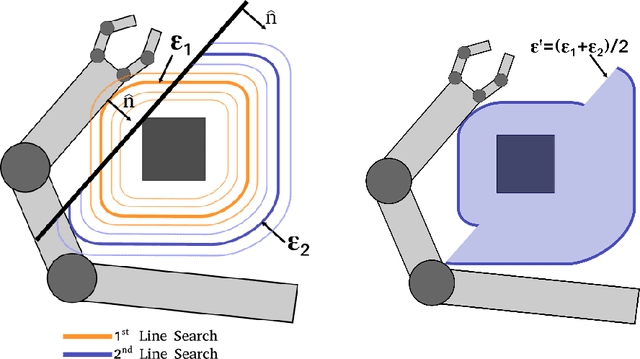
To operate reactively in uncertain environments, robots need to be able to quickly estimate the risk that they will collide with their environment. This ability is important for both planning (to ensure that plans maintain acceptable levels of safety) and execution (to provide real-time warnings when risk exceeds some threshold). Existing methods for estimating this risk are often limited to models with simplified geometry (e.g. point robots); others handle complex geometry but are too slow for many applications. In this paper, we present two algorithms for quickly computing upper bounds on the risk of collision between a robot and uncertain obstacles by searching for certificate regions that capture collision probability mass while avoiding the robot. These algorithms come with strong theoretical guarantees that the true risk does not exceed the estimated value, support arbitrary geometry via convex decomposition, and provide fast query times ($<200\mu$s) in representative scenarios. We characterize the performance of these algorithms in environments of varying complexity, demonstrating at least an order of magnitude speedup over existing techniques.
Online Risk-Bounded Motion Planning for Autonomous Vehicles in Dynamic Environments
Apr 04, 2019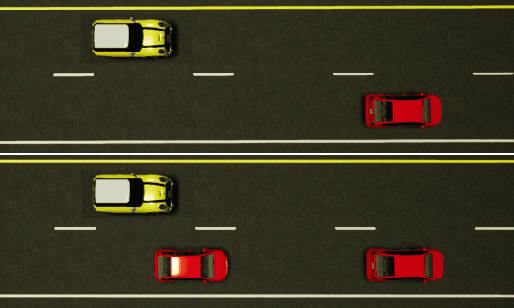
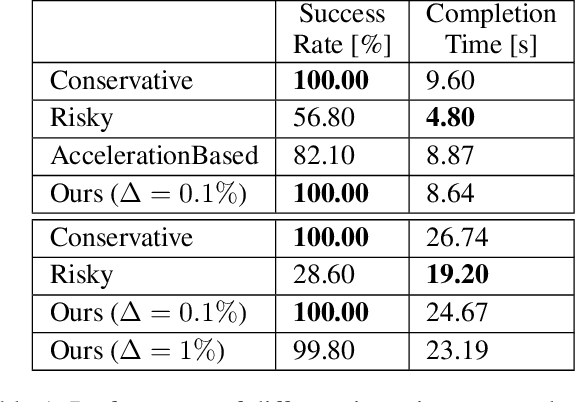
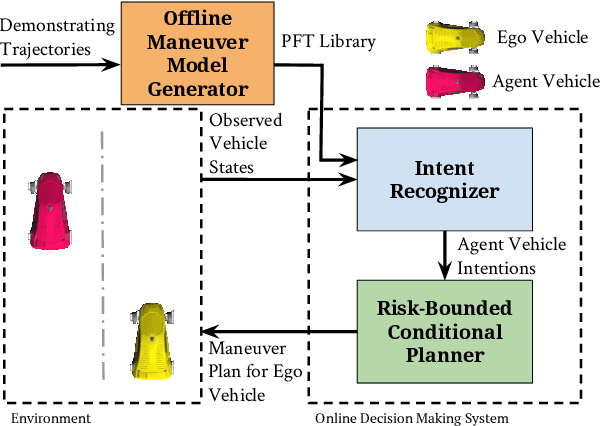
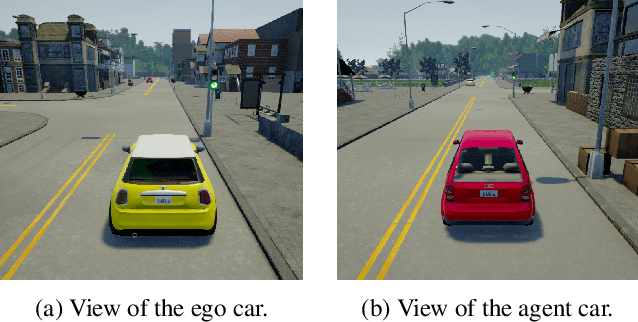
A crucial challenge to efficient and robust motion planning for autonomous vehicles is understanding the intentions of the surrounding agents. Ignoring the intentions of the other agents in dynamic environments can lead to risky or over-conservative plans. In this work, we model the motion planning problem as a partially observable Markov decision process (POMDP) and propose an online system that combines an intent recognition algorithm and a POMDP solver to generate risk-bounded plans for the ego vehicle navigating with a number of dynamic agent vehicles. The intent recognition algorithm predicts the probabilistic hybrid motion states of each agent vehicle over a finite horizon using Bayesian filtering and a library of pre-learned maneuver motion models. We update the POMDP model with the intent recognition results in real time and solve it using a heuristic search algorithm which produces policies with upper-bound guarantees on the probability of near colliding with other dynamic agents. We demonstrate that our system is able to generate better motion plans in terms of efficiency and safety in a number of challenging environments including unprotected intersection left turns and lane changes as compared to the baseline methods.
Chance Constrained Motion Planning for High-Dimensional Robots
Nov 07, 2018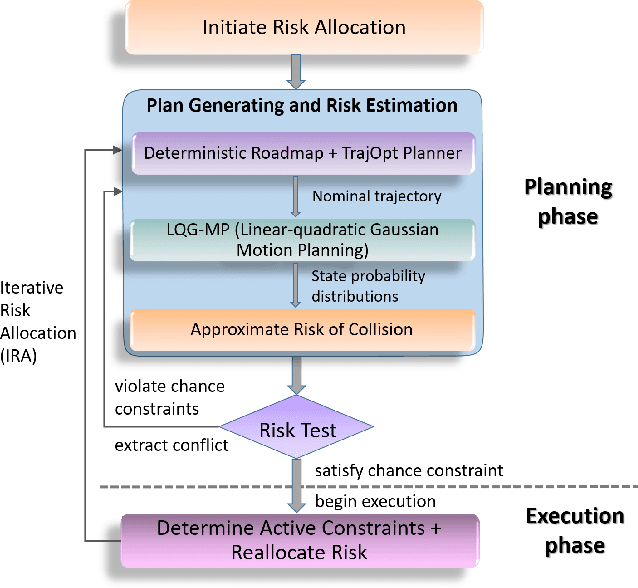
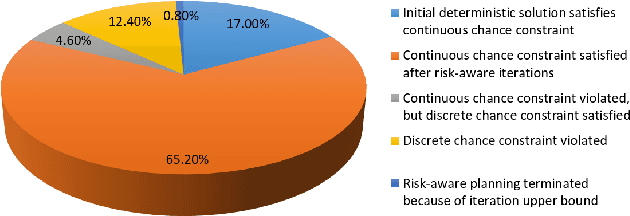
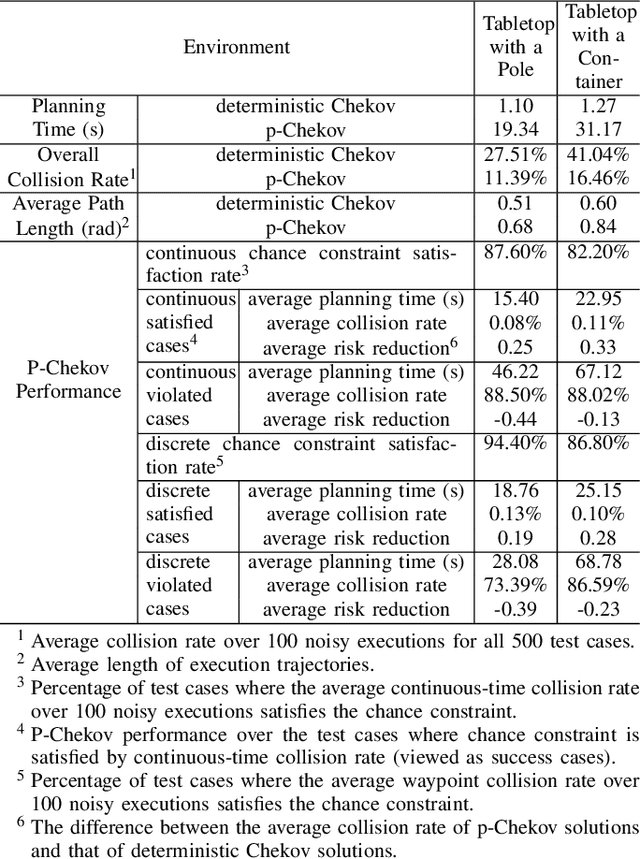
This paper introduces Probabilistic Chekov (p-Chekov), a chance-constrained motion planning system that can be applied to high degree-of-freedom (DOF) robots under motion uncertainty and imperfect state information. Given process and observation noise models, it can find feasible trajectories which satisfy a user-specified bound over the probability of collision. Leveraging our previous work in deterministic motion planning which integrated trajectory optimization into a sparse roadmap framework, p-Chekov shows superiority in its planning speed for high-dimensional tasks. P-Chekov incorporates a linear-quadratic Gaussian motion planning approach into the estimation of the robot state probability distribution, applies quadrature theories to waypoint collision risk estimation, and adapts risk allocation approaches to assign allowable probabilities of failure among waypoints. Unlike other existing risk-aware planners, p-Chekov can be applied to high-DOF robotic planning tasks without the convexification of the environment. The experiment results in this paper show that this p-Chekov system can effectively reduce collision risk and satisfy user-specified chance constraints in typical real-world planning scenarios for high-DOF robots.