 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Empowerment-based Solution to Robotic Manipulation Tasks with Sparse Rewards
Paper and Code
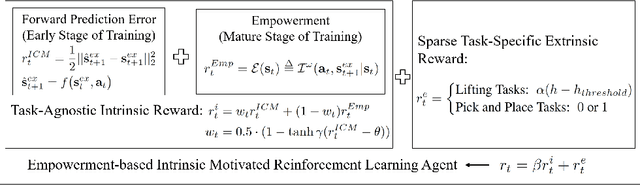
In order to provide adaptive and user-friendly solutions to robotic manipulation, it is important that the agent can learn to accomplish tasks even if they are only provided with very sparse instruction signals. To address the issues reinforcement learning algorithms face when task rewards are sparse, this paper proposes a novel form of intrinsic motivation that can allow robotic manipulators to learn useful manipulation skills with only sparse extrinsic rewards. Through integrating and balancing empowerment and curiosity, this approach shows superior performance compared to other existing intrinsic exploration approaches during extensive empirical testing. Qualitative analysis also shows that when combined with diversity-driven intrinsic motivations, this approach can help manipulators learn a set of diverse skills which could potentially be applied to other more complicated manipulation tasks and accelerate their learning process.