 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot Squid Game: Quadrupedal Locomotion for Traversing Narrow Tunnels
May 13, 2026Quadruped robots demonstrate exceptional potential for navigating complex terrain in critical applications such as search and rescue missions and infrastructure inspection However autonomous traversal of confined 3D environments including tunnels caves and collapsed structures remains a significant challenge Existing methods often struggle with rigid gait patterns limited adaptability to diverse geometries and reliance on oversimplified environmental assumptions This paper introduces a Reinforcement Learning RL framework that combines procedural environment generation with policy distillation to enable robust locomotion across various tunnel configurations Our approach leverages a teacher student training paradigm where specialized expert policies trained on procedurally generated tunnel geometries transfer their knowledge to a unified student policy This strategy eliminates the need for complex reward shaping in end-to-end RL training simplifying the process by breaking down complicated tasks into smaller more manageable components that are easier for the robot to learn By synthesizing diverse tunnel structures during training and distilling navigation strategies into a generalizable policy our method achieves consistent traversal across complex spatial constraints where conventional approaches fail We demonstrate through both simulation and real world experiments that our method enables quadruped robots to successfully traverse challenging confined tunnel environments
MorFiC: Fixing Value Miscalibration for Zero-Shot Quadruped Transfer
Mar 15, 2026Generalizing learned locomotion policies across quadrupedal robots with different morphologies remain a challenge. Policies trained on a single robot often break when deployed on embodiments with different mass distributions, kinematics, joint limits, or actuation constraints, forcing per robot retraining. We present MorFiC, a reinforcement learning approach for zero-shot cross-morphology locomotion using a single shared policy. MorFiC resolves a key failure mode in multi-morphology actor-critic training: a shared critic tends to average incompatible value targets across embodiments, yielding miscalibrated advantages. To address this, MorFiC conditions the critic via morphology-aware modulation driven by robot physical and control parameters, generating morphology-specific value estimates within a shared network. Trained with a single source robot with morphology randomization in simulation, MorFiC can transfer to unseen robots and surpasses morphology-conditioned PPO baselines by improving stable average speed and longest stable run on multiple targets, including speed gains of +16.1% on A1, ~2x on Cheetah, and ~5x on B1. We additionally show that MorFiC reduces the value-prediction error variance across morphologies and stabilizes the advantage estimates, demonstrating that the improved value-function calibration corresponds to a stronger transfer performance. Finally, we demonstrate zero-shot deployment on two Unitree Go1 and Go2 robots without fine-tuning, indicating that critic-side conditioning is a practical approach for cross-morphology generalization.
TransCurriculum: Multi-Dimensional Curriculum Learning for Fast & Stable Locomotion
Mar 14, 2026High-speed legged locomotion struggles with stability and transfer losses at higher command velocities during deployment. One reason is that most curricula vary difficulty along single axis, for example increase the range of command velocities, terrain difficulty, or domain parameters (e.g. friction or payload mass) using either fixed update rule or instantaneous rewards while ignoring how the history of robot training has evolved. We propose TransCurriculum, a transformer-based multi-dimensional curriculum learning approach for agile quadrupedal locomotion. TransCurriculum adapts to 3 axes, velocity command targets, terrain difficulty, and domain randomization parameters (friction and payload mass). Rather than feeding task reward history directly into the low-level control policy, our formulation exploits it at the curriculum level. A transformer-based teacher retrieves the sequence of rewards and uses it to predict future rewards, success rate, and learning progress to guide expansion of this multidimensional curriculum towards high performing task bins. Finally we validate our approach on the Unitree Go1 robot in simulation (Isaac Gym) and deploy it zero-shot on Go1 hardware. Our TransCurriculum policy achieves a maximum velocity of 6.3 m/s in simulation and outperforms prior curriculum baselines. We tested our TransCurriculum trained policy on terrains (carpets, slopes, tiles, concrete), achieving a forward velocity of 4.1 m/s on carpet surpassing the fastest curriculum methods by 18.8% and achieves maximum zero-shot value among all tested methods. Our multi-dimensional curriculum also reduces the transfer loss to 18% from 27% for command only curriculum, demonstrating the benefits of joint training over velocity, terrain and domain randomization dimension while keeping the task success rate of 80-90% on rigid indoor and outdoor surfaces.
HACL: History-Aware Curriculum Learning for Fast Locomotion
May 23, 2025We address the problem of agile and rapid locomotion, a key characteristic of quadrupedal and bipedal robots. We present a new algorithm that maintains stability and generates high-speed trajectories by considering the temporal aspect of locomotion. Our formulation takes into account past information based on a novel history-aware curriculum Learning (HACL) algorithm. We model the history of joint velocity commands with respect to the observed linear and angular rewards using a recurrent neural net (RNN). The hidden state helps the curriculum learn the relationship between the forward linear velocity and angular velocity commands and the rewards over a given time-step. We validate our approach on the MIT Mini Cheetah,Unitree Go1, and Go2 robots in a simulated environment and on a Unitree Go1 robot in real-world scenarios. In practice, HACL achieves peak forward velocity of 6.7 m/s for a given command velocity of 7m/s and outperforms prior locomotion algorithms by nearly 20%.
McARL:Morphology-Control-Aware Reinforcement Learning for Generalizable Quadrupedal Locomotion
May 23, 2025We present Morphology-Control-Aware Reinforcement Learning (McARL), a new approach to overcome challenges of hyperparameter tuning and transfer loss, enabling generalizable locomotion across robot morphologies. We use a morphology-conditioned policy by incorporating a randomized morphology vector, sampled from a defined morphology range, into both the actor and critic networks. This allows the policy to learn parameters that generalize to robots with similar characteristics. We demonstrate that a single policy trained on a Unitree Go1 robot using McARL can be transferred to a different morphology (e.g., Unitree Go2 robot) and can achieve zero-shot transfer velocity of up to 3.5 m/s without retraining or fine-tuning. Moreover, it achieves 6.0 m/s on the training Go1 robot and generalizes to other morphologies like A1 and Mini Cheetah. We also analyze the impact of morphology distance on transfer performance and highlight McARL's advantages over prior approaches. McARL achieves 44-150% higher transfer performance on Go2, Mini Cheetah, and A1 compared to PPO variants.
Human-Robot Co-Transportation with Human Uncertainty-Aware MPC and Pose Optimization
Mar 31, 2024



This paper proposes a new control algorithm for human-robot co-transportation based on a robot manipulator equipped with a mobile base and a robotic arm. The primary focus is to adapt to human uncertainties through the robot's whole-body dynamics and pose optimization. We introduce an augmented Model Predictive Control (MPC) formulation that explicitly models human uncertainties and contains extra variables than regular MPC to optimize the pose of the robotic arm. The core of our methodology involves a two-step iterative design: At each planning horizon, we select the best pose of the robotic arm (joint angle combination) from a candidate set, aiming to achieve the lowest estimated control cost. This selection is based on solving an uncertainty-aware Discrete Algebraic Ricatti Equation (DARE), which also informs the optimal control inputs for both the mobile base and the robotic arm. To validate the effectiveness of the proposed approach, we provide theoretical derivation for the uncertainty-aware DARE and perform simulated and proof-of-concept hardware experiments using a Fetch robot under varying conditions, including different nominal trajectories and noise levels. The results reveal that our proposed approach outperforms baseline algorithms, maintaining similar execution time with that do not consider human uncertainty or do not perform pose optimization.
Dexterous Legged Locomotion in Confined 3D Spaces with Reinforcement Learning
Mar 06, 2024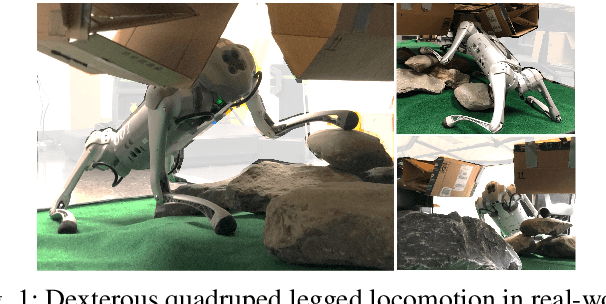
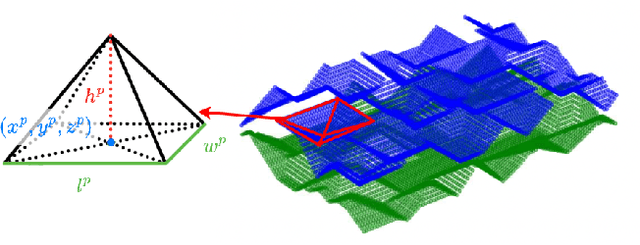
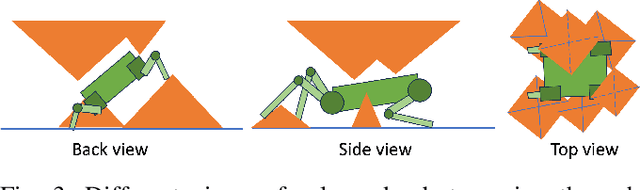
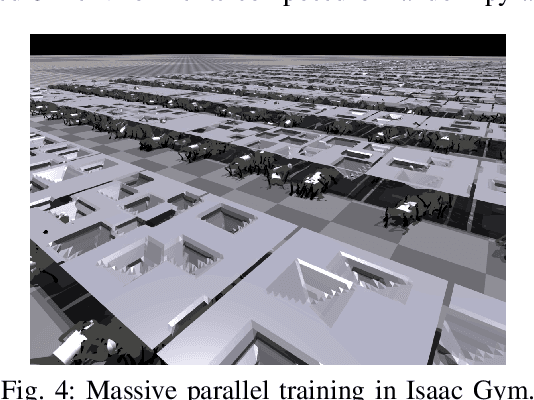
Recent advances of locomotion controllers utilizing deep reinforcement learning (RL) have yielded impressive results in terms of achieving rapid and robust locomotion across challenging terrain, such as rugged rocks, non-rigid ground, and slippery surfaces. However, while these controllers primarily address challenges underneath the robot, relatively little research has investigated legged mobility through confined 3D spaces, such as narrow tunnels or irregular voids, which impose all-around constraints. The cyclic gait patterns resulted from existing RL-based methods to learn parameterized locomotion skills characterized by motion parameters, such as velocity and body height, may not be adequate to navigate robots through challenging confined 3D spaces, requiring both agile 3D obstacle avoidance and robust legged locomotion. Instead, we propose to learn locomotion skills end-to-end from goal-oriented navigation in confined 3D spaces. To address the inefficiency of tracking distant navigation goals, we introduce a hierarchical locomotion controller that combines a classical planner tasked with planning waypoints to reach a faraway global goal location, and an RL-based policy trained to follow these waypoints by generating low-level motion commands. This approach allows the policy to explore its own locomotion skills within the entire solution space and facilitates smooth transitions between local goals, enabling long-term navigation towards distant goals. In simulation, our hierarchical approach succeeds at navigating through demanding confined 3D environments, outperforming both pure end-to-end learning approaches and parameterized locomotion skills. We further demonstrate the successful real-world deployment of our simulation-trained controller on a real robot.
Targeted Learning: A Hybrid Approach to Social Robot Navigation
Sep 23, 2023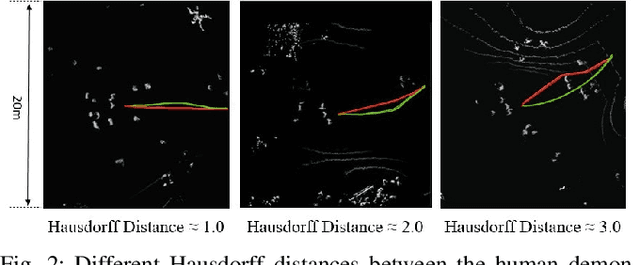



Empowering robots to navigate in a socially compliant manner is essential for the acceptance of robots moving in human-inhabited environments. Previously, roboticists have developed classical navigation systems with decades of empirical validation to achieve safety and efficiency. However, the many complex factors of social compliance make classical navigation systems hard to adapt to social situations, where no amount of tuning enables them to be both safe (people are too unpredictable) and efficient (the frozen robot problem). With recent advances in deep learning approaches, the common reaction has been to entirely discard classical navigation systems and start from scratch, building a completely new learning-based social navigation planner. In this work, we find that this reaction is unnecessarily extreme: using a large-scale real-world social navigation dataset, SCAND, we find that classical systems can be used safely and efficiently in a large number of social situations (up to 80%). We therefore ask if we can rethink this problem by leveraging the advantages of both classical and learning-based approaches. We propose a hybrid strategy in which we learn to switch between a classical geometric planner and a data-driven method. Our experiments on both SCAND and two physical robots show that the hybrid planner can achieve better social compliance in terms of a variety of metrics, compared to using either the classical or learning-based approach alone.
A Study on Learning Social Robot Navigation with Multimodal Perception
Sep 22, 2023



Autonomous mobile robots need to perceive the environments with their onboard sensors (e.g., LiDARs and RGB cameras) and then make appropriate navigation decisions. In order to navigate human-inhabited public spaces, such a navigation task becomes more than only obstacle avoidance, but also requires considering surrounding humans and their intentions to somewhat change the navigation behavior in response to the underlying social norms, i.e., being socially compliant. Machine learning methods are shown to be effective in capturing those complex and subtle social interactions in a data-driven manner, without explicitly hand-crafting simplified models or cost functions. Considering multiple available sensor modalities and the efficiency of learning methods, this paper presents a comprehensive study on learning social robot navigation with multimodal perception using a large-scale real-world dataset. The study investigates social robot navigation decision making on both the global and local planning levels and contrasts unimodal and multimodal learning against a set of classical navigation approaches in different social scenarios, while also analyzing the training and generalizability performance from the learning perspective. We also conduct a human study on how learning with multimodal perception affects the perceived social compliance. The results show that multimodal learning has a clear advantage over unimodal learning in both dataset and human studies. We open-source our code for the community's future use to study multimodal perception for learning social robot navigation.