 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTerrain Costmap Generation via Scaled Preference Conditioning
Nov 14, 2025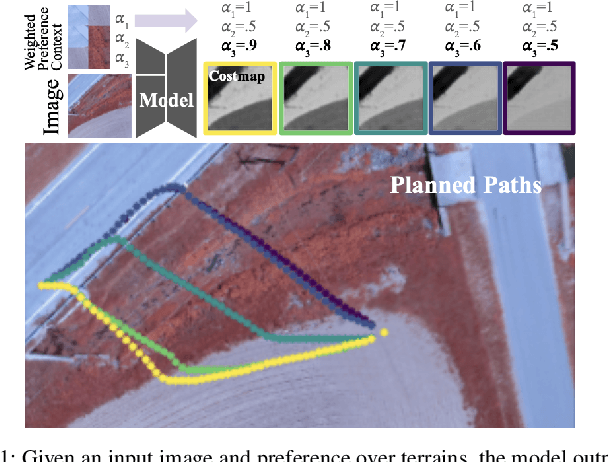
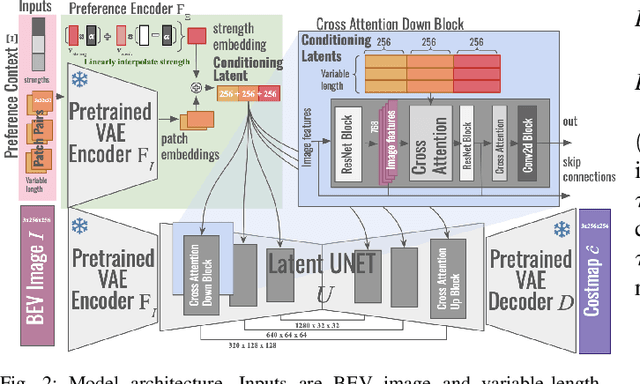
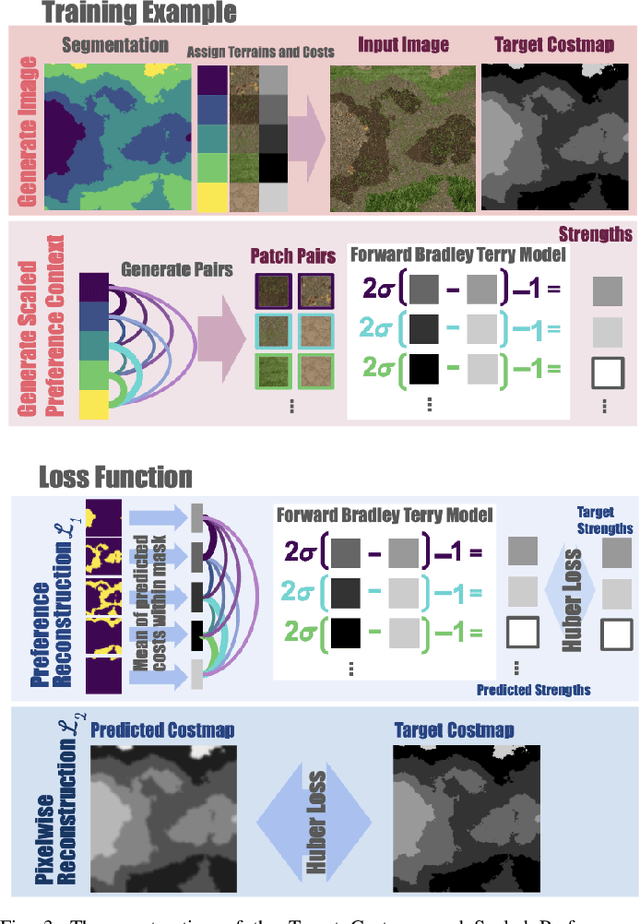
Successful autonomous robot navigation in off-road domains requires the ability to generate high-quality terrain costmaps that are able to both generalize well over a wide variety of terrains and rapidly adapt relative costs at test time to meet mission-specific needs. Existing approaches for costmap generation allow for either rapid test-time adaptation of relative costs (e.g., semantic segmentation methods) or generalization to new terrain types (e.g., representation learning methods), but not both. In this work, we present scaled preference conditioned all-terrain costmap generation (SPACER), a novel approach for generating terrain costmaps that leverages synthetic data during training in order to generalize well to new terrains, and allows for rapid test-time adaptation of relative costs by conditioning on a user-specified scaled preference context. Using large-scale aerial maps, we provide empirical evidence that SPACER outperforms other approaches at generating costmaps for terrain navigation, with the lowest measured regret across varied preferences in five of seven environments for global path planning.
Semantic Masking and Visual Feature Matching for Robust Localization
Nov 04, 2024



We are interested in long-term deployments of autonomous robots to aid astronauts with maintenance and monitoring operations in settings such as the International Space Station. Unfortunately, such environments tend to be highly dynamic and unstructured, and their frequent reconfiguration poses a challenge for robust long-term localization of robots. Many state-of-the-art visual feature-based localization algorithms are not robust towards spatial scene changes, and SLAM algorithms, while promising, cannot run within the low-compute budget available to space robots. To address this gap, we present a computationally efficient semantic masking approach for visual feature matching that improves the accuracy and robustness of visual localization systems during long-term deployment in changing environments. Our method introduces a lightweight check that enforces matches to be within long-term static objects and have consistent semantic classes. We evaluate this approach using both map-based relocalization and relative pose estimation and show that it improves Absolute Trajectory Error (ATE) and correct match ratios on the publicly available Astrobee dataset. While this approach was originally developed for microgravity robotic freeflyers, it can be applied to any visual feature matching pipeline to improve robustness.
PACER: Preference-conditioned All-terrain Costmap Generation
Oct 30, 2024



In autonomous robot navigation, terrain cost assignment is typically performed using a semantics-based paradigm in which terrain is first labeled using a pre-trained semantic classifier and costs are then assigned according to a user-defined mapping between label and cost. While this approach is rapidly adaptable to changing user preferences, only preferences over the types of terrain that are already known by the semantic classifier can be expressed. In this paper, we hypothesize that a machine-learning-based alternative to the semantics-based paradigm above will allow for rapid cost assignment adaptation to preferences expressed over new terrains at deployment time without the need for additional training. To investigate this hypothesis, we introduce and study PACER, a novel approach to costmap generation that accepts as input a single birds-eye view (BEV) image of the surrounding area along with a user-specified preference context and generates a corresponding BEV costmap that aligns with the preference context. Using both real and synthetic data along with a combination of proposed training tasks, we find that PACER is able to adapt quickly to new user preferences while also exhibiting better generalization to novel terrains compared to both semantics-based and representation-learning approaches.
Targeted Learning: A Hybrid Approach to Social Robot Navigation
Sep 23, 2023



Empowering robots to navigate in a socially compliant manner is essential for the acceptance of robots moving in human-inhabited environments. Previously, roboticists have developed classical navigation systems with decades of empirical validation to achieve safety and efficiency. However, the many complex factors of social compliance make classical navigation systems hard to adapt to social situations, where no amount of tuning enables them to be both safe (people are too unpredictable) and efficient (the frozen robot problem). With recent advances in deep learning approaches, the common reaction has been to entirely discard classical navigation systems and start from scratch, building a completely new learning-based social navigation planner. In this work, we find that this reaction is unnecessarily extreme: using a large-scale real-world social navigation dataset, SCAND, we find that classical systems can be used safely and efficiently in a large number of social situations (up to 80%). We therefore ask if we can rethink this problem by leveraging the advantages of both classical and learning-based approaches. We propose a hybrid strategy in which we learn to switch between a classical geometric planner and a data-driven method. Our experiments on both SCAND and two physical robots show that the hybrid planner can achieve better social compliance in terms of a variety of metrics, compared to using either the classical or learning-based approach alone.