 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePandora: Articulated 3D Scene Graphs from Egocentric Vision
Mar 30, 2026Robotic mapping systems typically approach building metric-semantic scene representations from the robot's own sensors and cameras. However, these "first person" maps inherit the robot's own limitations due to its embodiment or skillset, which may leave many aspects of the environment unexplored. For example, the robot might not be able to open drawers or access wall cabinets. In this sense, the map representation is not as complete, and requires a more capable robot to fill in the gaps. We narrow these blind spots in current methods by leveraging egocentric data captured as a human naturally explores a scene wearing Project Aria glasses, giving a way to directly transfer knowledge about articulation from the human to any deployable robot. We demonstrate that, by using simple heuristics, we can leverage egocentric data to recover models of articulate object parts, with quality comparable to those of state-of-the-art methods based on other input modalities. We also show how to integrate these models into 3D scene graph representations, leading to a better understanding of object dynamics and object-container relationships. We finally demonstrate that these articulated 3D scene graphs enhance a robot's ability to perform mobile manipulation tasks, showcasing an application where a Boston Dynamics Spot is tasked with retrieving concealed target items, given only the 3D scene graph as input.
Learning Visual Parkour from Generated Images
Oct 31, 2024


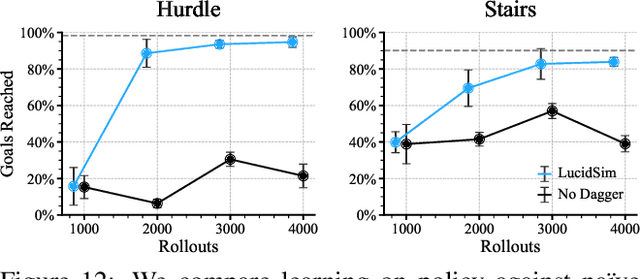
Fast and accurate physics simulation is an essential component of robot learning, where robots can explore failure scenarios that are difficult to produce in the real world and learn from unlimited on-policy data. Yet, it remains challenging to incorporate RGB-color perception into the sim-to-real pipeline that matches the real world in its richness and realism. In this work, we train a robot dog in simulation for visual parkour. We propose a way to use generative models to synthesize diverse and physically accurate image sequences of the scene from the robot's ego-centric perspective. We present demonstrations of zero-shot transfer to the RGB-only observations of the real world on a robot equipped with a low-cost, off-the-shelf color camera. website visit https://lucidsim.github.io
Distilled Feature Fields Enable Few-Shot Language-Guided Manipulation
Jul 27, 2023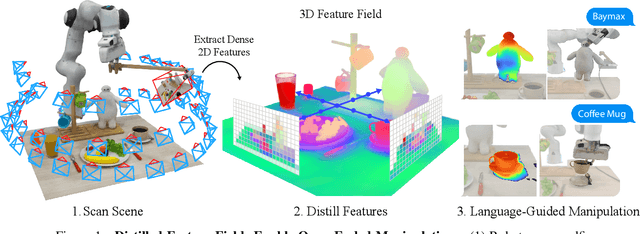
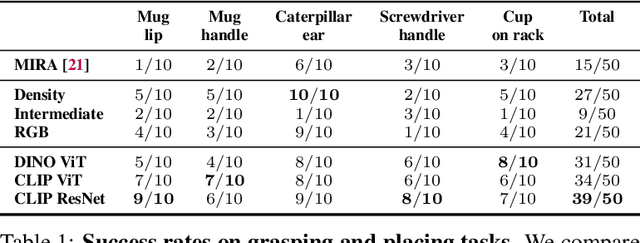
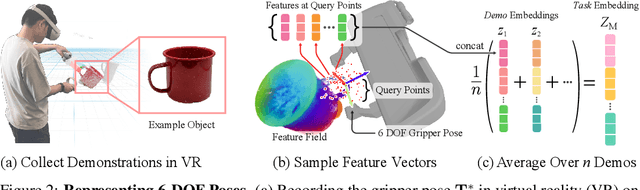
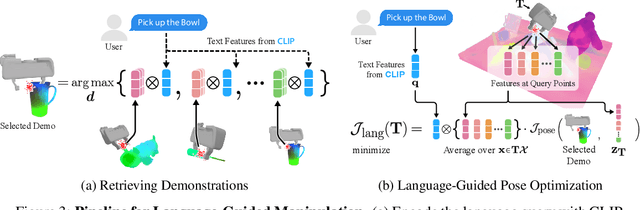
Self-supervised and language-supervised image models contain rich knowledge of the world that is important for generalization. Many robotic tasks, however, require a detailed understanding of 3D geometry, which is often lacking in 2D image features. This work bridges this 2D-to-3D gap for robotic manipulation by leveraging distilled feature fields to combine accurate 3D geometry with rich semantics from 2D foundation models. We present a few-shot learning method for 6-DOF grasping and placing that harnesses these strong spatial and semantic priors to achieve in-the-wild generalization to unseen objects. Using features distilled from a vision-language model, CLIP, we present a way to designate novel objects for manipulation via free-text natural language, and demonstrate its ability to generalize to unseen expressions and novel categories of objects.
Virtual impactor-based label-free bio-aerosol detection using holography and deep learning
Aug 30, 2022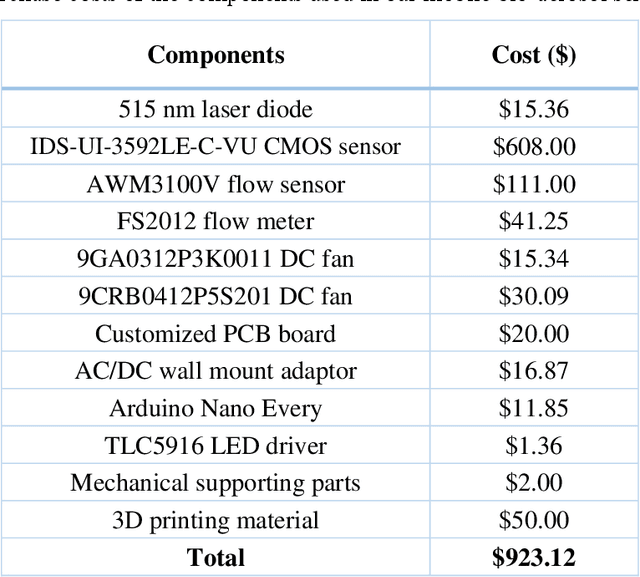
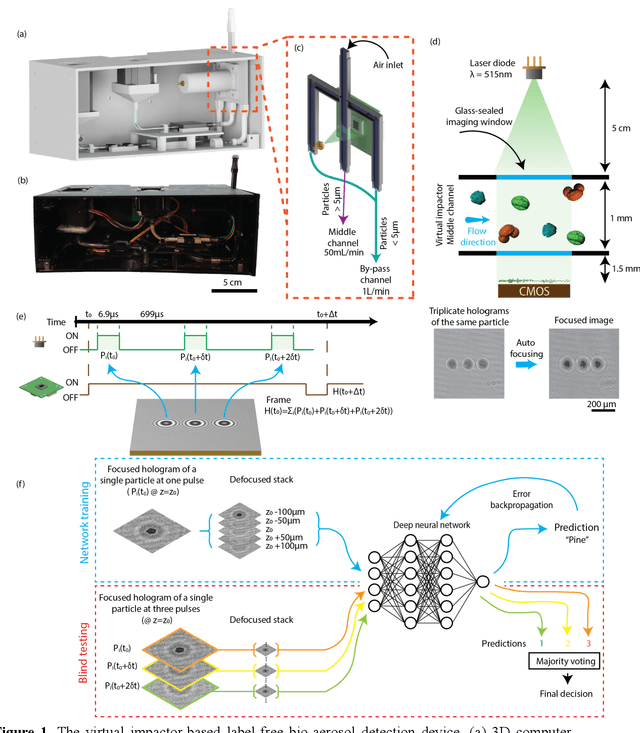
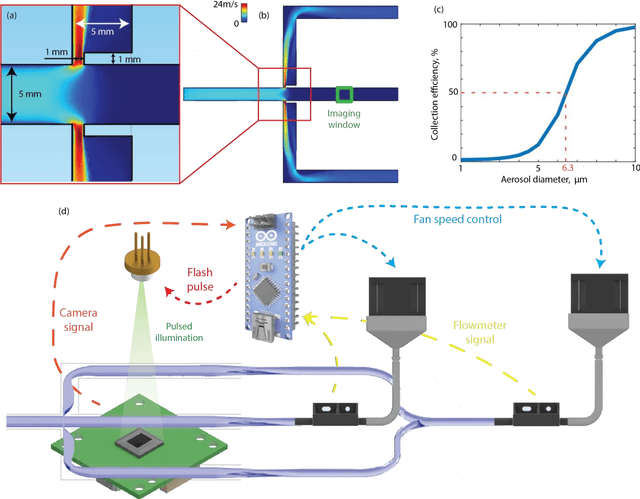
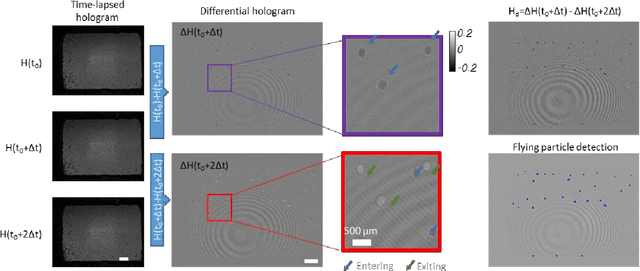
Exposure to bio-aerosols such as mold spores and pollen can lead to adverse health effects. There is a need for a portable and cost-effective device for long-term monitoring and quantification of various bio-aerosols. To address this need, we present a mobile and cost-effective label-free bio-aerosol sensor that takes holographic images of flowing particulate matter concentrated by a virtual impactor, which selectively slows down and guides particles larger than ~6 microns to fly through an imaging window. The flowing particles are illuminated by a pulsed laser diode, casting their inline holograms on a CMOS image sensor in a lens-free mobile imaging device. The illumination contains three short pulses with a negligible shift of the flowing particle within one pulse, and triplicate holograms of the same particle are recorded at a single frame before it exits the imaging field-of-view, revealing different perspectives of each particle. The particles within the virtual impactor are localized through a differential detection scheme, and a deep neural network classifies the aerosol type in a label-free manner, based on the acquired holographic images. We demonstrated the success of this mobile bio-aerosol detector with a virtual impactor using different types of pollen (i.e., bermuda, elm, oak, pine, sycamore, and wheat) and achieved a blind classification accuracy of 92.91%. This mobile and cost-effective device weighs ~700 g and can be used for label-free sensing and quantification of various bio-aerosols over extended periods since it is based on a cartridge-free virtual impactor that does not capture or immobilize particulate matter.
Modeling Stated Preference for Mobility-on-Demand Transit: A Comparison of Machine Learning and Logit Models
Nov 04, 2018
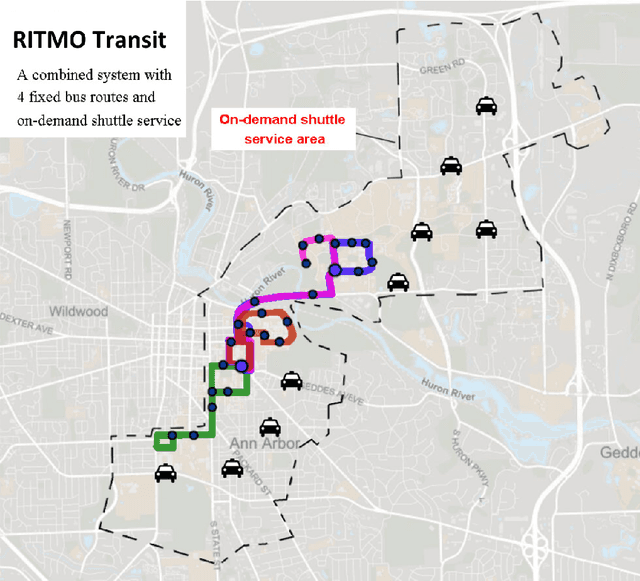
Logit models are usually applied when studying individual travel behavior, i.e., to predict travel mode choice and to gain behavioral insights on traveler preferences. Recently, some studies have applied machine learning to model travel mode choice and reported higher out-of-sample prediction accuracy than conventional logit models (e.g., multinomial logit). However, there has not been a comprehensive comparison between logit models and machine learning that covers both prediction and behavioral analysis. This paper aims at addressing this gap by examining the key differences in model development, evaluation, and behavioral interpretation between logit and machine-learning models for travel-mode choice modeling. To complement the theoretical discussions, we also empirically evaluated the two approaches on stated-preference survey data for a new type of transit system integrating high-frequency fixed routes and micro-transit. The results show that machine learning can produce significantly higher predictive accuracy than logit models and are better at capturing the nonlinear relationships between trip attributes and mode-choice outcomes. On the other hand, compared to the multinomial logit model, the best-performing machine-learning model, the random forest model, produces less reasonable behavioral outputs (i.e. marginal effects and elasticities) when they were computed from a standard approach. By introducing some behavioral constraints into the computation of behavioral outputs from a random forest model, however, we obtained better results that are somewhat comparable with the multinomial logit model. We believe that there is great potential in merging ideas from machine learning and conventional statistical methods to develop refined models for travel-behavior research and suggest some possible research directions.