 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning from Feedback: Semantic Enhancement for Object SLAM Using Foundation Models
Nov 11, 2024



Semantic Simultaneous Localization and Mapping (SLAM) systems struggle to map semantically similar objects in close proximity, especially in cluttered indoor environments. We introduce Semantic Enhancement for Object SLAM (SEO-SLAM), a novel SLAM system that leverages Vision-Language Models (VLMs) and Multimodal Large Language Models (MLLMs) to enhance object-level semantic mapping in such environments. SEO-SLAM tackles existing challenges by (1) generating more specific and descriptive open-vocabulary object labels using MLLMs, (2) simultaneously correcting factors causing erroneous landmarks, and (3) dynamically updating a multiclass confusion matrix to mitigate object detector biases. Our approach enables more precise distinctions between similar objects and maintains map coherence by reflecting scene changes through MLLM feedback. We evaluate SEO-SLAM on our challenging dataset, demonstrating enhanced accuracy and robustness in environments with multiple similar objects. Our system outperforms existing approaches in terms of landmark matching accuracy and semantic consistency. Results show the feedback from MLLM improves object-centric semantic mapping. Our dataset is publicly available at: jungseokhong.com/SEO-SLAM.
Learning Visual Parkour from Generated Images
Oct 31, 2024


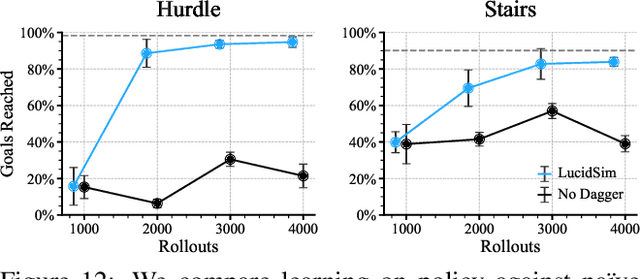
Fast and accurate physics simulation is an essential component of robot learning, where robots can explore failure scenarios that are difficult to produce in the real world and learn from unlimited on-policy data. Yet, it remains challenging to incorporate RGB-color perception into the sim-to-real pipeline that matches the real world in its richness and realism. In this work, we train a robot dog in simulation for visual parkour. We propose a way to use generative models to synthesize diverse and physically accurate image sequences of the scene from the robot's ego-centric perspective. We present demonstrations of zero-shot transfer to the RGB-only observations of the real world on a robot equipped with a low-cost, off-the-shelf color camera. website visit https://lucidsim.github.io