 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLooking beyond the next token
Apr 15, 2025The structure of causal language model training assumes that each token can be accurately predicted from the previous context. This contrasts with humans' natural writing and reasoning process, where goals are typically known before the exact argument or phrasings. While this mismatch has been well studied in the literature, the working assumption has been that architectural changes are needed to address this mismatch. We argue that rearranging and processing the training data sequences can allow models to more accurately imitate the true data-generating process, and does not require any other changes to the architecture or training infrastructure. We demonstrate that this technique, Trelawney, and the inference algorithms derived from it allow us to improve performance on several key benchmarks that span planning, algorithmic reasoning, and story generation tasks. Finally, our method naturally enables the generation of long-term goals at no additional cost. We investigate how using the model's goal-generation capability can further improve planning and reasoning. Additionally, we believe Trelawney could potentially open doors to new capabilities beyond the current language modeling paradigm.
Training a Generally Curious Agent
Feb 24, 2025



Efficient exploration is essential for intelligent systems interacting with their environment, but existing language models often fall short in scenarios that require strategic information gathering. In this paper, we present PAPRIKA, a fine-tuning approach that enables language models to develop general decision-making capabilities that are not confined to particular environments. By training on synthetic interaction data from different tasks that require diverse strategies, PAPRIKA teaches models to explore and adapt their behavior on a new task based on environment feedback in-context without more gradient updates. Experimental results show that models fine-tuned with PAPRIKA can effectively transfer their learned decision-making capabilities to entirely unseen tasks without additional training. Unlike traditional training, our approach's primary bottleneck lies in sampling useful interaction data instead of model updates. To improve sample efficiency, we propose a curriculum learning strategy that prioritizes sampling trajectories from tasks with high learning potential. These results suggest a promising path towards AI systems that can autonomously solve novel sequential decision-making problems that require interactions with the external world.
That Sounds Right: Auditory Self-Supervision for Dynamic Robot Manipulation
Oct 03, 2022
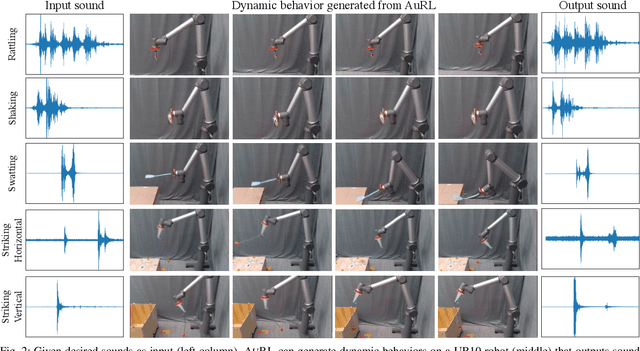


Learning to produce contact-rich, dynamic behaviors from raw sensory data has been a longstanding challenge in robotics. Prominent approaches primarily focus on using visual or tactile sensing, where unfortunately one fails to capture high-frequency interaction, while the other can be too delicate for large-scale data collection. In this work, we propose a data-centric approach to dynamic manipulation that uses an often ignored source of information: sound. We first collect a dataset of 25k interaction-sound pairs across five dynamic tasks using commodity contact microphones. Then, given this data, we leverage self-supervised learning to accelerate behavior prediction from sound. Our experiments indicate that this self-supervised 'pretraining' is crucial to achieving high performance, with a 34.5% lower MSE than plain supervised learning and a 54.3% lower MSE over visual training. Importantly, we find that when asked to generate desired sound profiles, online rollouts of our models on a UR10 robot can produce dynamic behavior that achieves an average of 11.5% improvement over supervised learning on audio similarity metrics.
RB2: Robotic Manipulation Benchmarking with a Twist
Mar 15, 2022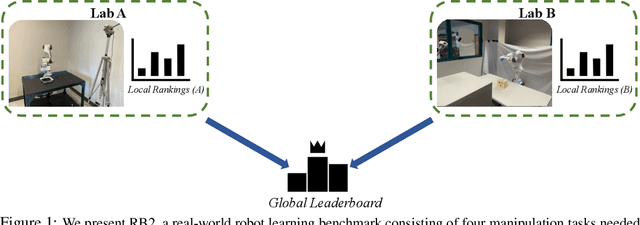
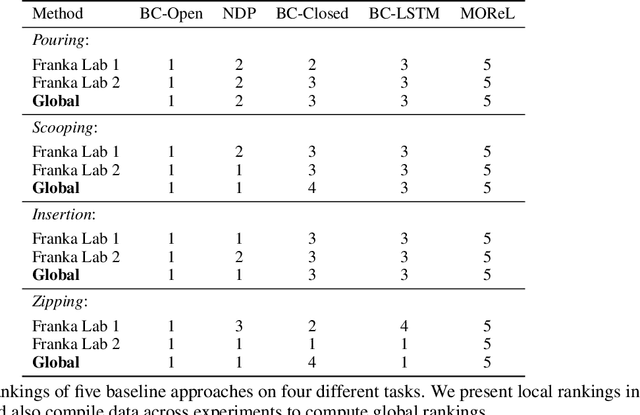
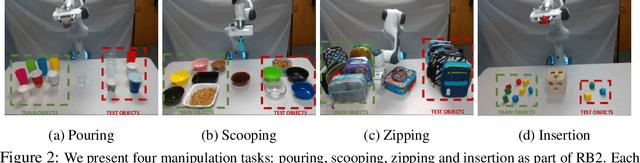
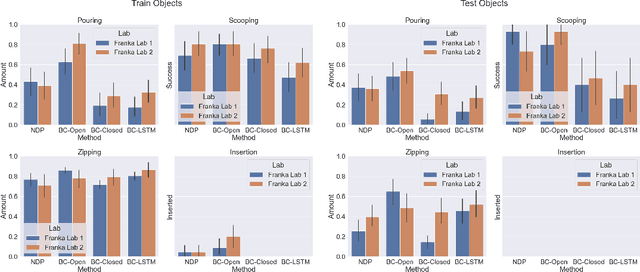
Benchmarks offer a scientific way to compare algorithms using objective performance metrics. Good benchmarks have two features: (a) they should be widely useful for many research groups; (b) and they should produce reproducible findings. In robotic manipulation research, there is a trade-off between reproducibility and broad accessibility. If the benchmark is kept restrictive (fixed hardware, objects), the numbers are reproducible but the setup becomes less general. On the other hand, a benchmark could be a loose set of protocols (e.g. object sets) but the underlying variation in setups make the results non-reproducible. In this paper, we re-imagine benchmarking for robotic manipulation as state-of-the-art algorithmic implementations, alongside the usual set of tasks and experimental protocols. The added baseline implementations will provide a way to easily recreate SOTA numbers in a new local robotic setup, thus providing credible relative rankings between existing approaches and new work. However, these local rankings could vary between different setups. To resolve this issue, we build a mechanism for pooling experimental data between labs, and thus we establish a single global ranking for existing (and proposed) SOTA algorithms. Our benchmark, called Ranking-Based Robotics Benchmark (RB2), is evaluated on tasks that are inspired from clinically validated Southampton Hand Assessment Procedures. Our benchmark was run across two different labs and reveals several surprising findings. For example, extremely simple baselines like open-loop behavior cloning, outperform more complicated models (e.g. closed loop, RNN, Offline-RL, etc.) that are preferred by the field. We hope our fellow researchers will use RB2 to improve their research's quality and rigor.
Context is Everything: Implicit Identification for Dynamics Adaptation
Mar 10, 2022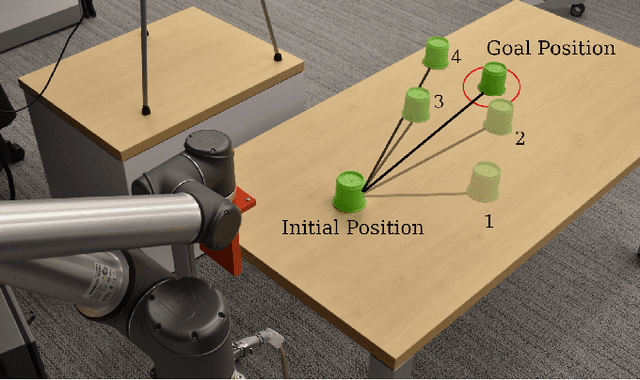
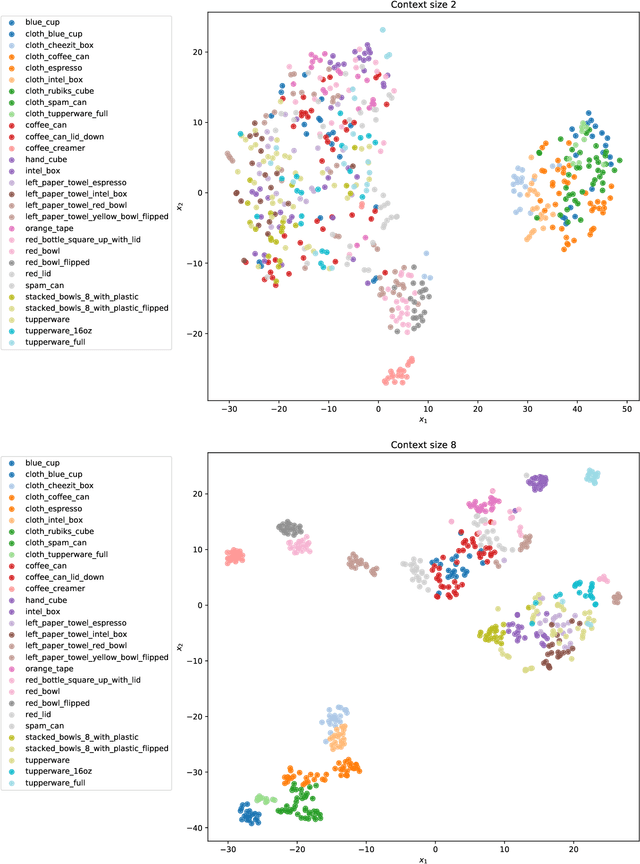
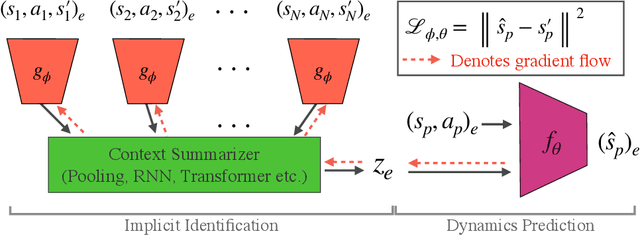
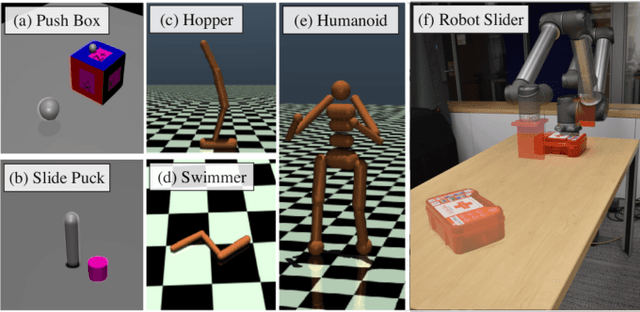
Understanding environment dynamics is necessary for robots to act safely and optimally in the world. In realistic scenarios, dynamics are non-stationary and the causal variables such as environment parameters cannot necessarily be precisely measured or inferred, even during training. We propose Implicit Identification for Dynamics Adaptation (IIDA), a simple method to allow predictive models to adapt to changing environment dynamics. IIDA assumes no access to the true variations in the world and instead implicitly infers properties of the environment from a small amount of contextual data. We demonstrate IIDA's ability to perform well in unseen environments through a suite of simulated experiments on MuJoCo environments and a real robot dynamic sliding task. In general, IIDA significantly reduces model error and results in higher task performance over commonly used methods. Our code and robot videos are at https://bennevans.github.io/iida/