 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporal Overlapping Prediction: A Self-supervised Pre-training Method for LiDAR Moving Object Segmentation
Mar 10, 2025



Moving object segmentation (MOS) on LiDAR point clouds is crucial for autonomous systems like self-driving vehicles. Previous supervised approaches rely heavily on costly manual annotations, while LiDAR sequences naturally capture temporal motion cues that can be leveraged for self-supervised learning. In this paper, we propose \textbf{T}emporal \textbf{O}verlapping \textbf{P}rediction (\textbf{TOP}), a self-supervised pre-training method that alleviate the labeling burden for MOS. \textbf{TOP} explores the temporal overlapping points that commonly observed by current and adjacent scans, and learns spatiotemporal representations by predicting the occupancy states of temporal overlapping points. Moreover, we utilize current occupancy reconstruction as an auxiliary pre-training objective, which enhances the current structural awareness of the model. We conduct extensive experiments and observe that the conventional metric Intersection-over-Union (IoU) shows strong bias to objects with more scanned points, which might neglect small or distant objects. To compensate for this bias, we introduce an additional metric called $\text{mIoU}_{\text{obj}}$ to evaluate object-level performance. Experiments on nuScenes and SemanticKITTI show that \textbf{TOP} outperforms both supervised training-from-scratch baseline and other self-supervised pre-training baselines by up to 28.77\% relative improvement, demonstrating strong transferability across LiDAR setups and generalization to other tasks. Code and pre-trained models will be publicly available upon publication.
Joint Intrinsic and Extrinsic LiDAR-Camera Calibration in Targetless Environments Using Plane-Constrained Bundle Adjustment
Aug 24, 2023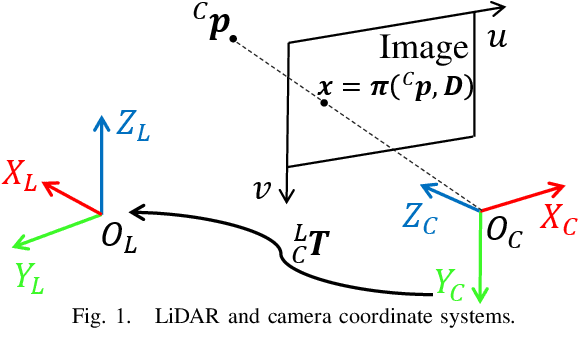
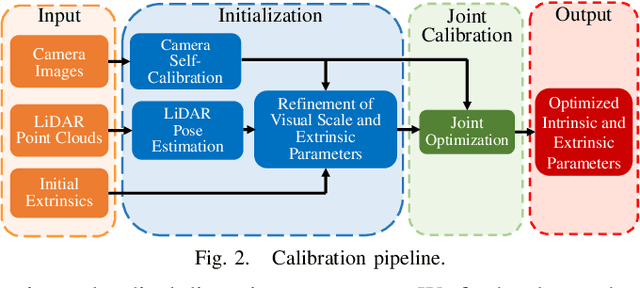
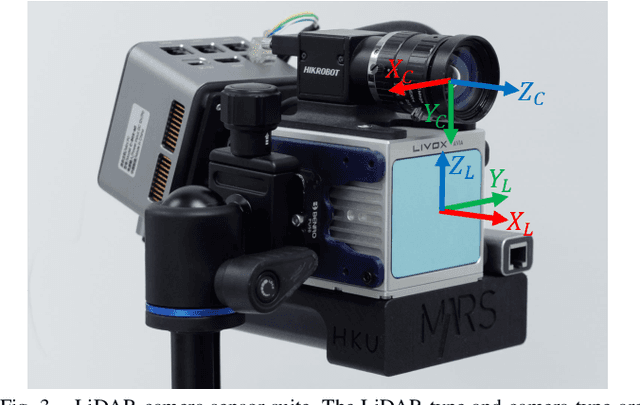
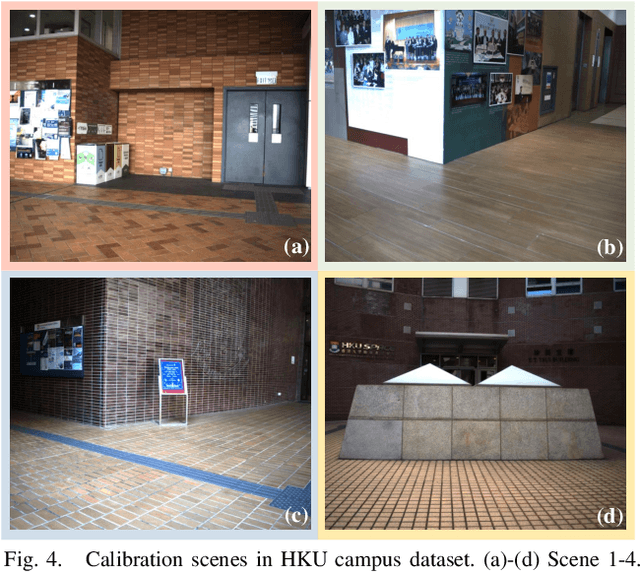
This paper introduces a novel targetless method for joint intrinsic and extrinsic calibration of LiDAR-camera systems using plane-constrained bundle adjustment (BA). Our method leverages LiDAR point cloud measurements from planes in the scene, alongside visual points derived from those planes. The core novelty of our method lies in the integration of visual BA with the registration between visual points and LiDAR point cloud planes, which is formulated as a unified optimization problem. This formulation achieves concurrent intrinsic and extrinsic calibration, while also imparting depth constraints to the visual points to enhance the accuracy of intrinsic calibration. Experiments are conducted on both public data sequences and self-collected dataset. The results showcase that our approach not only surpasses other state-of-the-art (SOTA) methods but also maintains remarkable calibration accuracy even within challenging environments. For the benefits of the robotics community, we have open sourced our codes.
Coarse-to-fine Hybrid 3D Mapping System with Co-calibrated Omnidirectional Camera and Non-repetitive LiDAR
Feb 08, 2023



This paper presents a novel 3D mapping robot with an omnidirectional field-of-view (FoV) sensor suite composed of a non-repetitive LiDAR and an omnidirectional camera. Thanks to the non-repetitive scanning nature of the LiDAR, an automatic targetless co-calibration method is proposed to simultaneously calibrate the intrinsic parameters for the omnidirectional camera and the extrinsic parameters for the camera and LiDAR, which is crucial for the required step in bringing color and texture information to the point clouds in surveying and mapping tasks. Comparisons and analyses are made to target-based intrinsic calibration and mutual information (MI)-based extrinsic calibration, respectively. With this co-calibrated sensor suite, the hybrid mapping robot integrates both the odometry-based mapping mode and stationary mapping mode. Meanwhile, we proposed a new workflow to achieve coarse-to-fine mapping, including efficient and coarse mapping in a global environment with odometry-based mapping mode; planning for viewpoints in the region-of-interest (ROI) based on the coarse map (relies on the previous work); navigating to each viewpoint and performing finer and more precise stationary scanning and mapping of the ROI. The fine map is stitched with the global coarse map, which provides a more efficient and precise result than the conventional stationary approaches and the emerging odometry-based approaches, respectively.