 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePotent but Stealthy: Rethink Profile Pollution against Sequential Recommendation via Bi-level Constrained Reinforcement Paradigm
Nov 14, 2025Sequential Recommenders, which exploit dynamic user intents through interaction sequences, is vulnerable to adversarial attacks. While existing attacks primarily rely on data poisoning, they require large-scale user access or fake profiles thus lacking practicality. In this paper, we focus on the Profile Pollution Attack that subtly contaminates partial user interactions to induce targeted mispredictions. Previous PPA methods suffer from two limitations, i.e., i) over-reliance on sequence horizon impact restricts fine-grained perturbations on item transitions, and ii) holistic modifications cause detectable distribution shifts. To address these challenges, we propose a constrained reinforcement driven attack CREAT that synergizes a bi-level optimization framework with multi-reward reinforcement learning to balance adversarial efficacy and stealthiness. We first develop a Pattern Balanced Rewarding Policy, which integrates pattern inversion rewards to invert critical patterns and distribution consistency rewards to minimize detectable shifts via unbalanced co-optimal transport. Then we employ a Constrained Group Relative Reinforcement Learning paradigm, enabling step-wise perturbations through dynamic barrier constraints and group-shared experience replay, achieving targeted pollution with minimal detectability. Extensive experiments demonstrate the effectiveness of CREAT.
THE-SEAN: A Heart Rate Variation-Inspired Temporally High-Order Event-Based Visual Odometry with Self-Supervised Spiking Event Accumulation Networks
Mar 07, 2025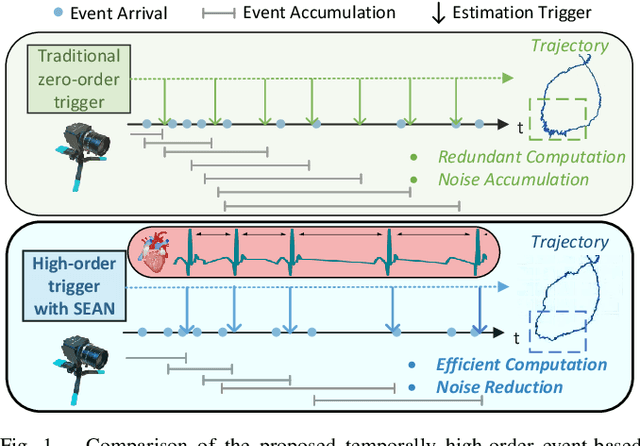
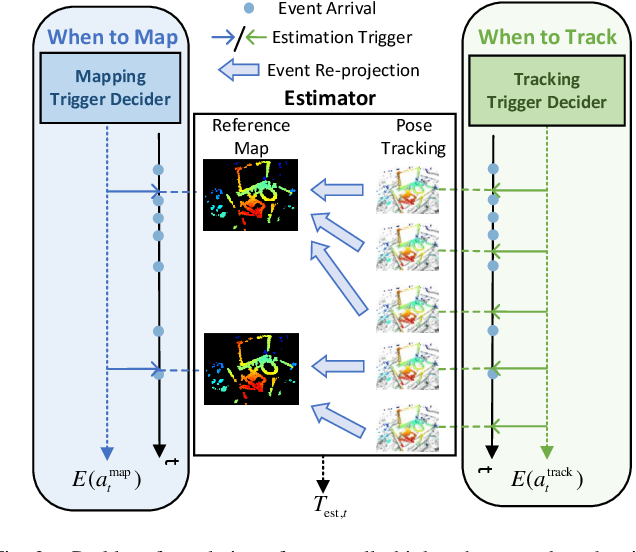
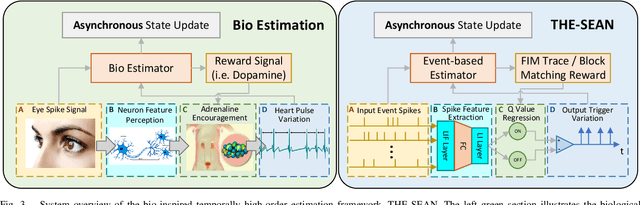
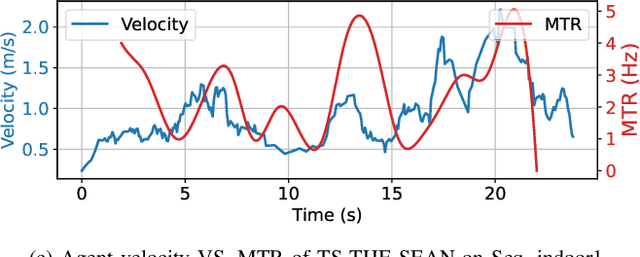
Event-based visual odometry has recently gained attention for its high accuracy and real-time performance in fast-motion systems. Unlike traditional synchronous estimators that rely on constant-frequency (zero-order) triggers, event-based visual odometry can actively accumulate information to generate temporally high-order estimation triggers. However, existing methods primarily focus on adaptive event representation after estimation triggers, neglecting the decision-making process for efficient temporal triggering itself. This oversight leads to the computational redundancy and noise accumulation. In this paper, we introduce a temporally high-order event-based visual odometry with spiking event accumulation networks (THE-SEAN). To the best of our knowledge, it is the first event-based visual odometry capable of dynamically adjusting its estimation trigger decision in response to motion and environmental changes. Inspired by biological systems that regulate hormone secretion to modulate heart rate, a self-supervised spiking neural network is designed to generate estimation triggers. This spiking network extracts temporal features to produce triggers, with rewards based on block matching points and Fisher information matrix (FIM) trace acquired from the estimator itself. Finally, THE-SEAN is evaluated across several open datasets, thereby demonstrating average improvements of 13\% in estimation accuracy, 9\% in smoothness, and 38\% in triggering efficiency compared to the state-of-the-art methods.