 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Temporal Fusion for Vectorized Map Construction in Mapless Autonomous Driving
Sep 01, 2024To reduce the reliance on high-definition (HD) maps, a growing trend in autonomous driving is leveraging on-board sensors to generate vectorized maps online. However, current methods are mostly constrained by processing only single-frame inputs, which hampers their robustness and effectiveness in complex scenarios. To overcome this problem, we propose an online map construction system that exploits the long-term temporal information to build a consistent vectorized map. First, the system efficiently fuses all historical road marking detections from an off-the-shelf network into a semantic voxel map, which is implemented using a hashing-based strategy to exploit the sparsity of road elements. Then reliable voxels are found by examining the fused information and incrementally clustered into an instance-level representation of road markings. Finally, the system incorporates domain knowledge to estimate the geometric and topological structures of roads, which can be directly consumed by the planning and control (PnC) module. Through experiments conducted in complicated urban environments, we have demonstrated that the output of our system is more consistent and accurate than the network output by a large margin and can be effectively used in a closed-loop autonomous driving system.
Maximum Channel Coding Rate of Finite Block Length MIMO Faster-Than-Nyquist Signaling
Mar 13, 2024The pursuit of higher data rates and efficient spectrum utilization in modern communication technologies necessitates novel solutions. In order to provide insights into improving spectral efficiency and reducing latency, this study investigates the maximum channel coding rate (MCCR) of finite block length (FBL) multiple-input multiple-output (MIMO) faster-than-Nyquist (FTN) channels. By optimizing power allocation, we derive the system's MCCR expression. Simulation results are compared with the existing literature to reveal the benefits of FTN in FBL transmission.
Exploring the Physical World Adversarial Robustness of Vehicle Detection
Aug 07, 2023



Adversarial attacks can compromise the robustness of real-world detection models. However, evaluating these models under real-world conditions poses challenges due to resource-intensive experiments. Virtual simulations offer an alternative, but the absence of standardized benchmarks hampers progress. Addressing this, we propose an innovative instant-level data generation pipeline using the CARLA simulator. Through this pipeline, we establish the Discrete and Continuous Instant-level (DCI) dataset, enabling comprehensive experiments involving three detection models and three physical adversarial attacks. Our findings highlight diverse model performances under adversarial conditions. Yolo v6 demonstrates remarkable resilience, experiencing just a marginal 6.59% average drop in average precision (AP). In contrast, the ASA attack yields a substantial 14.51% average AP reduction, twice the effect of other algorithms. We also note that static scenes yield higher recognition AP values, and outcomes remain relatively consistent across varying weather conditions. Intriguingly, our study suggests that advancements in adversarial attack algorithms may be approaching its ``limitation''.In summary, our work underscores the significance of adversarial attacks in real-world contexts and introduces the DCI dataset as a versatile benchmark. Our findings provide valuable insights for enhancing the robustness of detection models and offer guidance for future research endeavors in the realm of adversarial attacks.
MIMO Asynchronous MAC with Faster-than-Nyquist (FTN) Signaling
May 20, 2023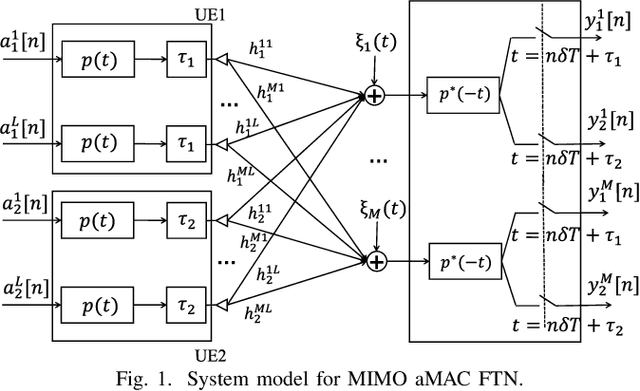
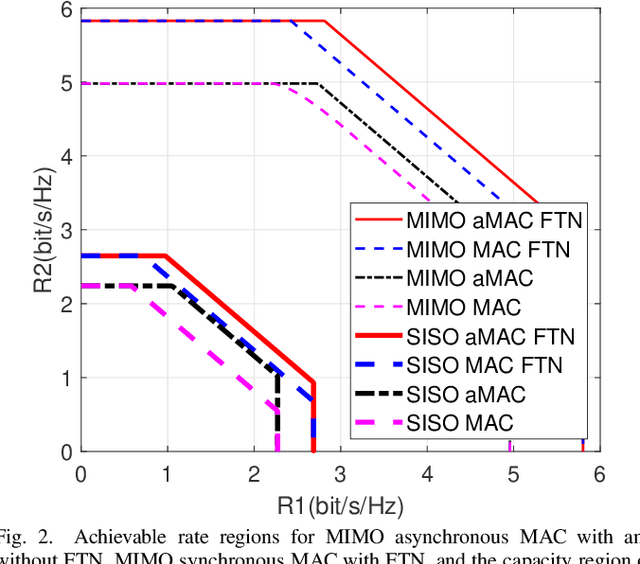
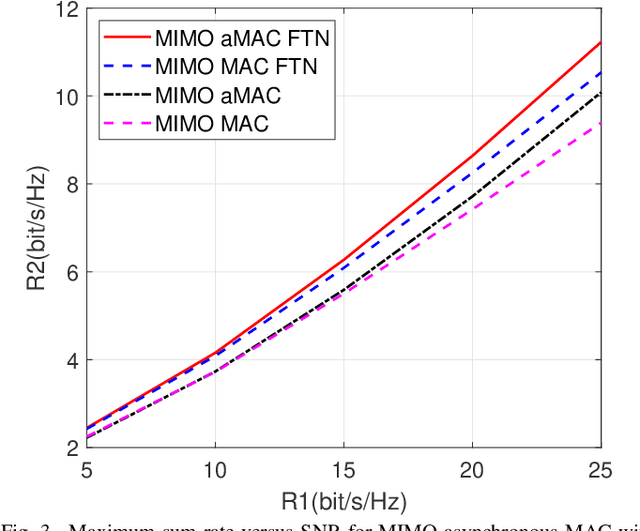

Faster-than-Nyquist (FTN) signaling is a nonorthogonal transmission technique, which brings in intentional inter-symbol interference. This way it can significantly enhance spectral efficiency for practical pulse shapes such as the root raised cosine pulses. This paper proposes an achievable rate region for the multiple antenna (MIMO) asynchronous multiple access channel (aMAC) with FTN signaling. The scheme applies waterfilling in the spatial domain and precoding in time. Waterfilling in space provides better power allocation and precoding helps mitigate inter-symbol interference due to asynchronous transmission and FTN. The results show that the gains due to asynchronous transmission and FTN are more emphasized in MIMO aMAC than in single antenna aMAC. Moreover, FTN improves single-user rates, and asynchronous transmission improves the sum-rate, due to better inter-user interference management.
Capacity Region of Asynchronous Multiple Access Channels with FTN
Jan 05, 2023

This paper studies the capacity region of asynchronous multiple access channel (MAC) with faster-thanNyquist (FTN) signaling. We first express the capacity region in the frequency domain. Next, we calculate an achievable rate region in time domain and prove that it is identical to the capacity region calculated in the frequency domain. Our analysis confirms that asynchronous transmission and FTN bring in significant gains.
The Digital Divide in Canada and the Role of LEO Satellites in Bridging the Gap
Mar 16, 2022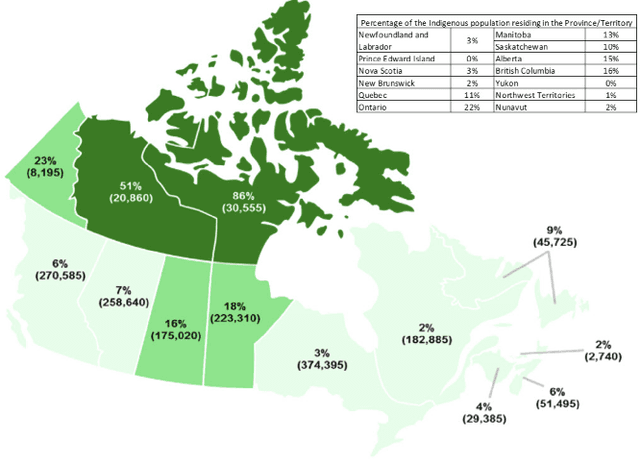
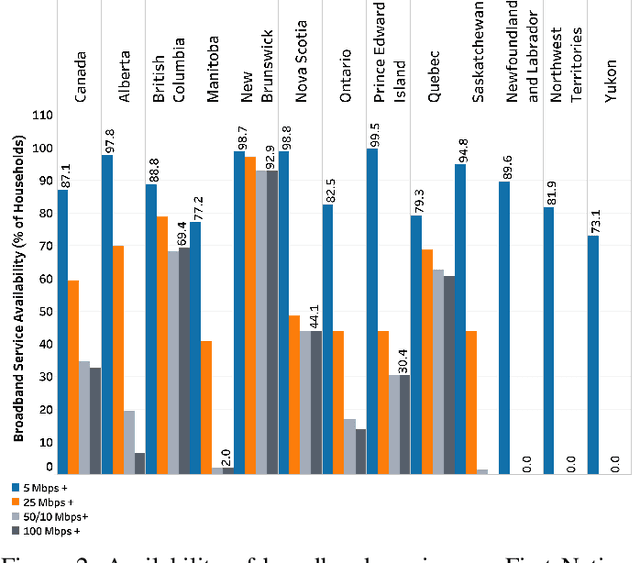

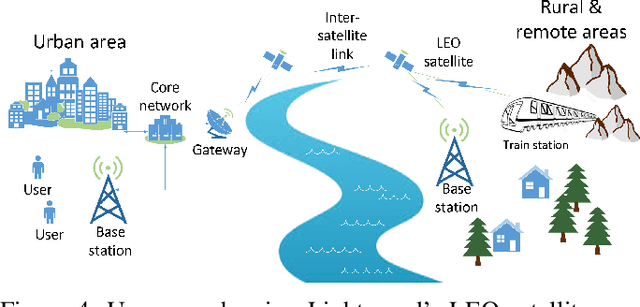
Overcoming the digital divide in rural and remote areas has always been a big challenge for Canada with its huge geographical area. In 2016, the Canadian Radio-television and Telecommunications Commission announced broadband Internet as a basic service available for all Canadians. However, approximately one million Canadians still do not have access to broadband services as of 2020. The COVID-19 pandemic has made the situation more challenging, as social, economic, and educational activities have increasingly been transferred online. The condition is more unfavorable for Indigenous communities. A key challenge in deploying rural and remote broadband Internet is to plan and implement high-capacity backbones, which are now available only in denser urban areas. For any Internet provider, it is almost impossible to make a viable business proposal in these areas. For example, the vast land of the Northwest Territories, Yukon, and Nunavuts diverse geographical features present obstacles for broadband infrastructure. In this paper, we investigate the digital divide in Canada with a focus on rural and remote areas. In so doing, we highlight two potential solutions using low Earth orbit (LEO) constellations to deliver broadband Internet in rural and remote areas to address the access inequality and the digital divide. The first solution involves integrating LEO constellations as a backbone for the existing 4G/5G telecommunications network. This solution uses satellites in a LEO constellation to provide a backhaul network connecting the 4G/5G access network to its core network. The 3rd Generation Partnership Project already specifies how to integrate LEO satellite networks into the 4G/5G network, and the Canadian satellite operator Telesat has already showcased this solution with one terrestrial operator, TIM Brasil, in their 4G network.
Fisher Information Field: an Efficient and Differentiable Map for Perception-aware Planning
Aug 07, 2020
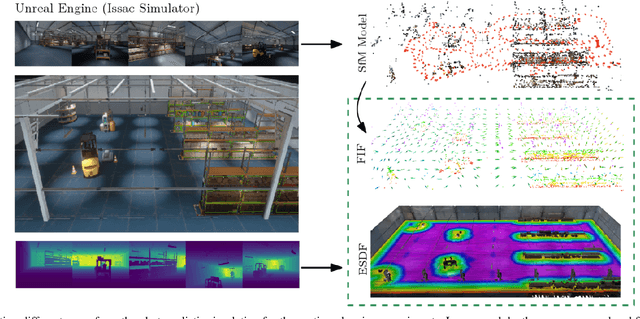

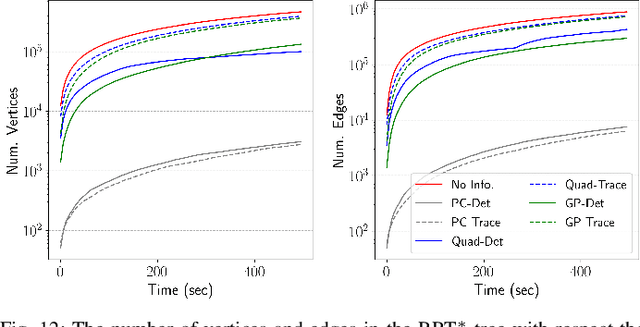
Considering visual localization accuracy at the planning time gives preference to robot motion that can be better localized and thus has the potential of improving vision-based navigation, especially in visually degraded environments. To integrate the knowledge about localization accuracy in motion planning algorithms, a central task is to quantify the amount of information that an image taken at a 6 degree-of-freedom pose brings for localization, which is often represented by the Fisher information. However, computing the Fisher information from a set of sparse landmarks (i.e., a point cloud), which is the most common map for visual localization, is inefficient. This approach scales linearly with the number of landmarks in the environment and does not allow the reuse of the computed Fisher information. To overcome these drawbacks, we propose the first dedicated map representation for evaluating the Fisher information of 6 degree-of-freedom visual localization for perception-aware motion planning. By formulating the Fisher information and sensor visibility carefully, we are able to separate the rotational invariant component from the Fisher information and store it in a voxel grid, namely the Fisher information field. This step only needs to be performed once for a known environment. The Fisher information for arbitrary poses can then be computed from the field in constant time, eliminating the need of costly iterating all the 3D landmarks at the planning time. Experimental results show that the proposed Fisher information field can be applied to different motion planning algorithms and is at least one order-of-magnitude faster than using the point cloud directly. Moreover,the proposed map representation is differentiable, resulting in better performance than the point cloud when used in trajectory optimization algorithms.
Reference Pose Generation for Visual Localization via Learned Features and View Synthesis
May 13, 2020



Visual Localization is one of the key enabling technologies for autonomous driving and augmented reality. High quality datasets with accurate 6 Degree-of-Freedom (DoF) reference poses are the foundation for benchmarking and improving existing methods. Traditionally, reference poses have been obtained via Structure-from-Motion (SfM). However, SfM itself relies on local features which are prone to fail when images were taken under different conditions, e.g., day/night changes. At the same time, manually annotating feature correspondences is not scalable and potentially inaccurate. In this work, we propose a semi-automated approach to generate reference poses based on feature matching between renderings of a 3D model and real images via learned features. Given an initial pose estimate, our approach iteratively refines the pose based on feature matches against a rendering of the model from the current pose estimate. We significantly improve the nighttime reference poses of the popular Aachen Day-Night dataset, showing that state-of-the-art visual localization methods perform better (up to 47%) than predicted by the original reference poses. We extend the dataset with new nighttime test images, provide uncertainty estimates for our new reference poses, and introduce a new evaluation criterion. We will make our reference poses and our framework publicly available upon publication.
Voxel Map for Visual SLAM
Mar 04, 2020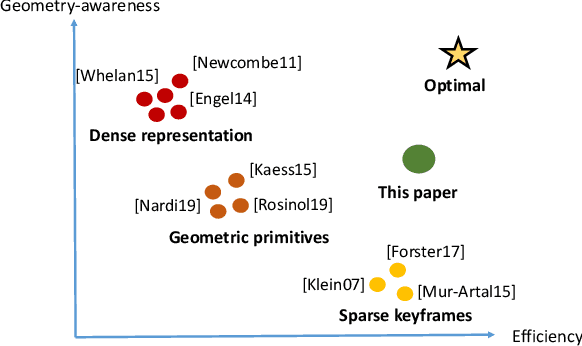
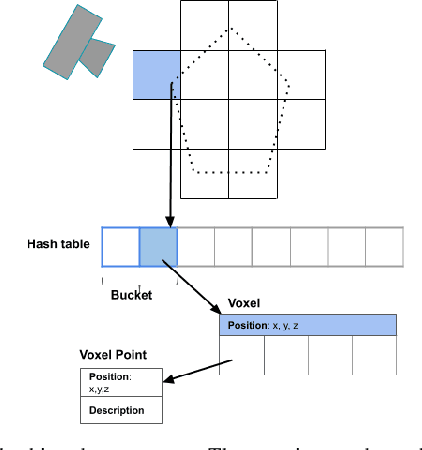
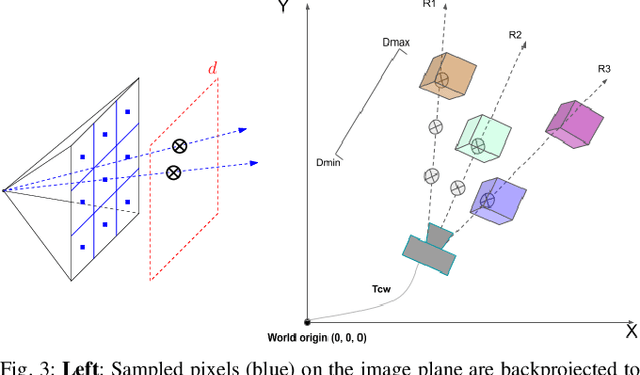
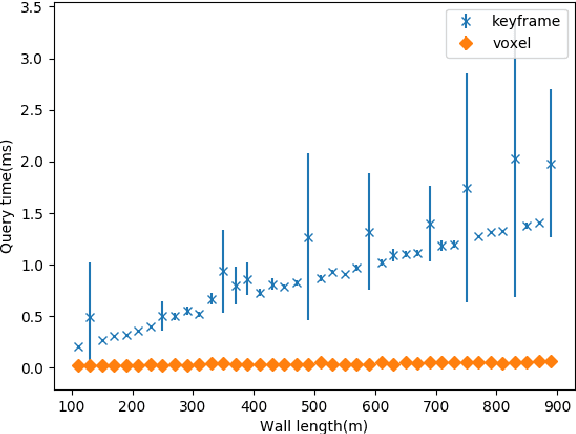
In modern visual SLAM systems, it is a standard practice to retrieve potential candidate map points from overlapping keyframes for further feature matching or direct tracking. In this work, we argue that keyframes are not the optimal choice for this task, due to several inherent limitations, such as weak geometric reasoning and poor scalability. We propose a voxel-map representation to efficiently retrieve map points for visual SLAM. In particular, we organize the map points in a regular voxel grid. Visible points from a camera pose are queried by sampling the camera frustum in a raycasting manner, which can be done in constant time using an efficient voxel hashing method. Compared with keyframes, the retrieved points using our method are geometrically guaranteed to fall in the camera field-of-view, and occluded points can be identified and removed to a certain extend. This method also naturally scales up to large scenes and complicated multicamera configurations. Experimental results show that our voxel map representation is as efficient as a keyframe map with 5 keyframes and provides significantly higher localization accuracy (average 46% improvement in RMSE) on the EuRoC dataset. The proposed voxel-map representation is a general approach to a fundamental functionality in visual SLAM and widely applicable.
Redesigning SLAM for Arbitrary Multi-Camera Systems
Mar 04, 2020

Adding more cameras to SLAM systems improves robustness and accuracy but complicates the design of the visual front-end significantly. Thus, most systems in the literature are tailored for specific camera configurations. In this work, we aim at an adaptive SLAM system that works for arbitrary multi-camera setups. To this end, we revisit several common building blocks in visual SLAM. In particular, we propose an adaptive initialization scheme, a sensor-agnostic, information-theoretic keyframe selection algorithm, and a scalable voxel-based map. These techniques make little assumption about the actual camera setups and prefer theoretically grounded methods over heuristics. We adapt a state-of-the-art visual-inertial odometry with these modifications, and experimental results show that the modified pipeline can adapt to a wide range of camera setups (e.g., 2 to 6 cameras in one experiment) without the need of sensor-specific modifications or tuning.