 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpInf-LLM: Parametric PDE Solving with LLMs via Operator Inference
Feb 02, 2026Solving diverse partial differential equations (PDEs) is fundamental in science and engineering. Large language models (LLMs) have demonstrated strong capabilities in code generation, symbolic reasoning, and tool use, but reliably solving PDEs across heterogeneous settings remains challenging. Prior work on LLM-based code generation and transformer-based foundation models for PDE learning has shown promising advances. However, a persistent trade-off between execution success rate and numerical accuracy arises, particularly when generalization to unseen parameters and boundary conditions is required. In this work, we propose OpInf-LLM, an LLM parametric PDE solving framework based on operator inference. The proposed framework leverages a small amount of solution data to enable accurate prediction of diverse PDE instances, including unseen parameters and configurations, and provides seamless integration with LLMs for natural language specification of PDE solving tasks. Its low computational demands and unified tool interface further enable a high execution success rate across heterogeneous settings. By combining operator inference with LLM capabilities, OpInf-LLM opens new possibilities for generalizable reduced-order modeling in LLM-based PDE solving.
Beyond the LUMIR challenge: The pathway to foundational registration models
May 30, 2025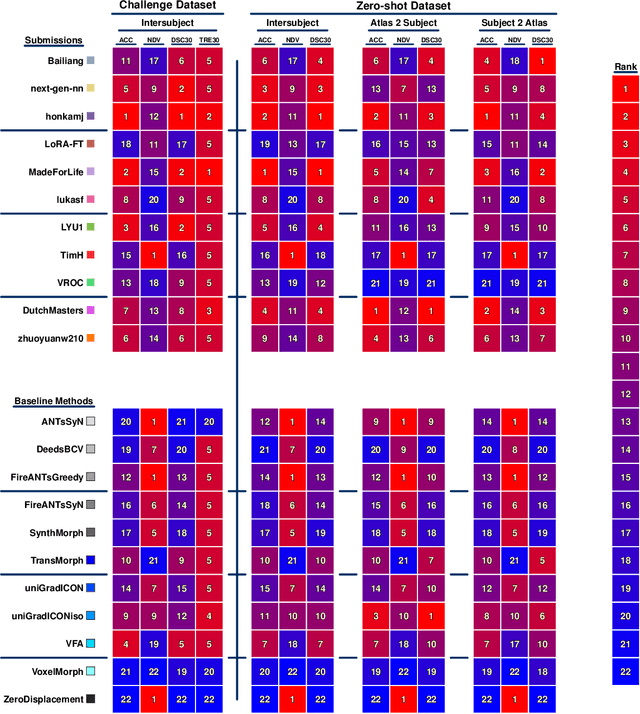
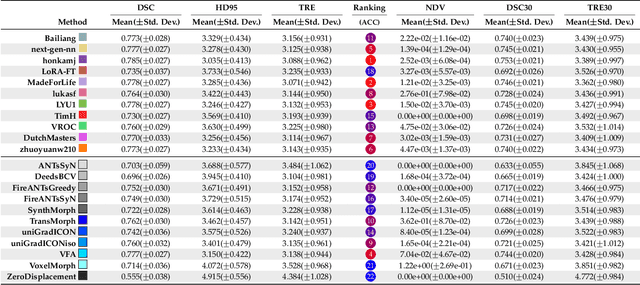
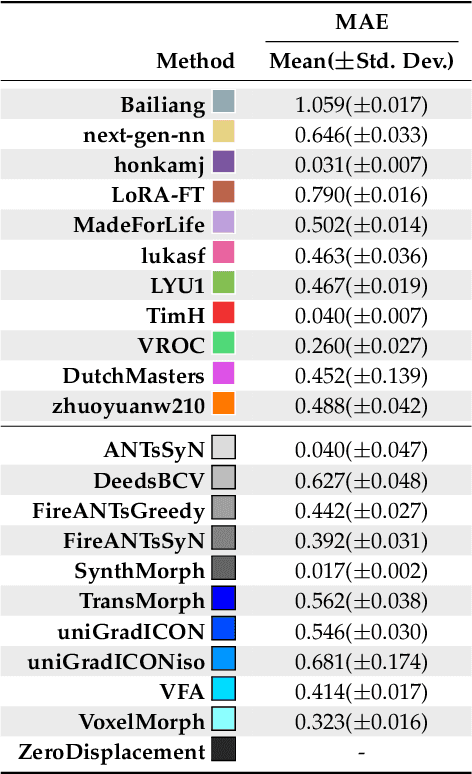
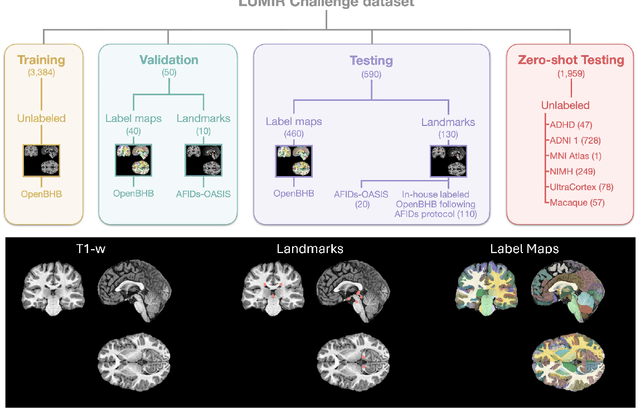
Medical image challenges have played a transformative role in advancing the field, catalyzing algorithmic innovation and establishing new performance standards across diverse clinical applications. Image registration, a foundational task in neuroimaging pipelines, has similarly benefited from the Learn2Reg initiative. Building on this foundation, we introduce the Large-scale Unsupervised Brain MRI Image Registration (LUMIR) challenge, a next-generation benchmark designed to assess and advance unsupervised brain MRI registration. Distinct from prior challenges that leveraged anatomical label maps for supervision, LUMIR removes this dependency by providing over 4,000 preprocessed T1-weighted brain MRIs for training without any label maps, encouraging biologically plausible deformation modeling through self-supervision. In addition to evaluating performance on 590 held-out test subjects, LUMIR introduces a rigorous suite of zero-shot generalization tasks, spanning out-of-domain imaging modalities (e.g., FLAIR, T2-weighted, T2*-weighted), disease populations (e.g., Alzheimer's disease), acquisition protocols (e.g., 9.4T MRI), and species (e.g., macaque brains). A total of 1,158 subjects and over 4,000 image pairs were included for evaluation. Performance was assessed using both segmentation-based metrics (Dice coefficient, 95th percentile Hausdorff distance) and landmark-based registration accuracy (target registration error). Across both in-domain and zero-shot tasks, deep learning-based methods consistently achieved state-of-the-art accuracy while producing anatomically plausible deformation fields. The top-performing deep learning-based models demonstrated diffeomorphic properties and inverse consistency, outperforming several leading optimization-based methods, and showing strong robustness to most domain shifts, the exception being a drop in performance on out-of-domain contrasts.
Physics-Informed Deep B-Spline Networks for Dynamical Systems
Mar 21, 2025Physics-informed machine learning provides an approach to combining data and governing physics laws for solving complex partial differential equations (PDEs). However, efficiently solving PDEs with varying parameters and changing initial conditions and boundary conditions (ICBCs) with theoretical guarantees remains an open challenge. We propose a hybrid framework that uses a neural network to learn B-spline control points to approximate solutions to PDEs with varying system and ICBC parameters. The proposed network can be trained efficiently as one can directly specify ICBCs without imposing losses, calculate physics-informed loss functions through analytical formulas, and requires only learning the weights of B-spline functions as opposed to both weights and basis as in traditional neural operator learning methods. We provide theoretical guarantees that the proposed B-spline networks serve as universal approximators for the set of solutions of PDEs with varying ICBCs under mild conditions and establish bounds on the generalization errors in physics-informed learning. We also demonstrate in experiments that the proposed B-spline network can solve problems with discontinuous ICBCs and outperforms existing methods, and is able to learn solutions of 3D dynamics with diverse initial conditions.
Generalizable Physics-informed Learning for Stochastic Safety-critical Systems
Jul 11, 2024



Accurate estimate of long-term risk is critical for safe decision-making, but sampling from rare risk events and long-term trajectories can be prohibitively costly. Risk gradient can be used in many first-order techniques for learning and control methods, but gradient estimate is difficult to obtain using Monte Carlo (MC) methods because the infinitesimal devisor may significantly amplify sampling noise. Motivated by this gap, we propose an efficient method to evaluate long-term risk probabilities and their gradients using short-term samples without sufficient risk events. We first derive that four types of long-term risk probability are solutions of certain partial differential equations (PDEs). Then, we propose a physics-informed learning technique that integrates data and physics information (aforementioned PDEs). The physics information helps propagate information beyond available data and obtain provable generalization beyond available data, which in turn enables long-term risk to be estimated using short-term samples of safe events. Finally, we demonstrate in simulation that the proposed technique has improved sample efficiency, generalizes well to unseen regions, and adapts to changing system parameters.
A Review of Image Processing Methods in Prostate Ultrasound
Jun 30, 2024Prostate cancer (PCa) poses a significant threat to men's health, with early diagnosis being crucial for improving prognosis and reducing mortality rates. Transrectal ultrasound (TRUS) plays a vital role in the diagnosis and image-guided intervention of PCa.To facilitate physicians with more accurate and efficient computer-assisted diagnosis and interventions, many image processing algorithms in TRUS have been proposed and achieved state-of-the-art performance in several tasks, including prostate gland segmentation, prostate image registration, PCa classification and detection, and interventional needle detection.The rapid development of these algorithms over the past two decades necessitates a comprehensive summary. In consequence, this survey provides a systematic analysis of this field, outlining the evolution of image processing methods in the context of TRUS image analysis and meanwhile highlighting their relevant contributions. Furthermore, this survey discusses current challenges and suggests future research directions to possibly advance this field further.
Encoding Matching Criteria for Cross-domain Deformable Image Registration
Jun 18, 2024Most existing deep learning-based registration methods are trained on single-type images to address same-domain tasks.However, cross-domain deformable registration remains challenging.We argue that the tailor-made matching criteria in traditional registration methods is one of the main reason they are applicable in different domains.Motivated by this, we devise a registration-oriented encoder to model the matching criteria of image features and structural features, which is beneficial to boost registration accuracy and adaptability.Specifically, a general feature encoder (Encoder-G) is proposed to capture comprehensive medical image features, while a structural feature encoder (Encoder-S) is designed to encode the structural self-similarity into the global representation.Extensive experiments on images from three different domains prove the efficacy of the proposed method. Moreover, by updating Encoder-S using one-shot learning, our method can effectively adapt to different domains.The code is publicly available at https://github.com/JuliusWang-7/EncoderReg.
Myopically Verifiable Probabilistic Certificates for Safe Control and Learning
Apr 23, 2024This paper addresses the design of safety certificates for stochastic systems, with a focus on ensuring long-term safety through fast real-time control. In stochastic environments, set invariance-based methods that restrict the probability of risk events in infinitesimal time intervals may exhibit significant long-term risks due to cumulative uncertainties/risks. On the other hand, reachability-based approaches that account for the long-term future may require prohibitive computation in real-time decision making. To overcome this challenge involving stringent long-term safety vs. computation tradeoffs, we first introduce a novel technique termed `probabilistic invariance'. This technique characterizes the invariance conditions of the probability of interest. When the target probability is defined using long-term trajectories, this technique can be used to design myopic conditions/controllers with assured long-term safe probability. Then, we integrate this technique into safe control and learning. The proposed control methods efficiently assure long-term safety using neural networks or model predictive controllers with short outlook horizons. The proposed learning methods can be used to guarantee long-term safety during and after training. Finally, we demonstrate the performance of the proposed techniques in numerical simulations.
Contextual Embedding Learning to Enhance 2D Networks for Volumetric Image Segmentation
Apr 02, 2024The segmentation of organs in volumetric medical images plays an important role in computer-aided diagnosis and treatment/surgery planning. Conventional 2D convolutional neural networks (CNNs) can hardly exploit the spatial correlation of volumetric data. Current 3D CNNs have the advantage to extract more powerful volumetric representations but they usually suffer from occupying excessive memory and computation nevertheless. In this study we aim to enhance the 2D networks with contextual information for better volumetric image segmentation. Accordingly, we propose a contextual embedding learning approach to facilitate 2D CNNs capturing spatial information properly. Our approach leverages the learned embedding and the slice-wisely neighboring matching as a soft cue to guide the network. In such a way, the contextual information can be transferred slice-by-slice thus boosting the volumetric representation of the network. Experiments on challenging prostate MRI dataset (PROMISE12) and abdominal CT dataset (CHAOS) show that our contextual embedding learning can effectively leverage the inter-slice context and improve segmentation performance. The proposed approach is a plug-and-play, and memory-efficient solution to enhance the 2D networks for volumetric segmentation. The code will be publicly available.
ModeTv2: GPU-accelerated Motion Decomposition Transformer for Pairwise Optimization in Medical Image Registration
Mar 25, 2024



Deformable image registration plays a crucial role in medical imaging, aiding in disease diagnosis and image-guided interventions. Traditional iterative methods are slow, while deep learning (DL) accelerates solutions but faces usability and precision challenges. This study introduces a pyramid network with the enhanced motion decomposition Transformer (ModeTv2) operator, showcasing superior pairwise optimization (PO) akin to traditional methods. We re-implement ModeT operator with CUDA extensions to enhance its computational efficiency. We further propose RegHead module which refines deformation fields, improves the realism of deformation and reduces parameters. By adopting the PO, the proposed network balances accuracy, efficiency, and generalizability. Extensive experiments on two public brain MRI datasets and one abdominal CT dataset demonstrate the network's suitability for PO, providing a DL model with enhanced usability and interpretability. The code is publicly available.
Pyramid Attention Network for Medical Image Registration
Feb 14, 2024



The advent of deep-learning-based registration networks has addressed the time-consuming challenge in traditional iterative methods.However, the potential of current registration networks for comprehensively capturing spatial relationships has not been fully explored, leading to inadequate performance in large-deformation image registration.The pure convolutional neural networks (CNNs) neglect feature enhancement, while current Transformer-based networks are susceptible to information redundancy.To alleviate these issues, we propose a pyramid attention network (PAN) for deformable medical image registration.Specifically, the proposed PAN incorporates a dual-stream pyramid encoder with channel-wise attention to boost the feature representation.Moreover, a multi-head local attention Transformer is introduced as decoder to analyze motion patterns and generate deformation fields.Extensive experiments on two public brain magnetic resonance imaging (MRI) datasets and one abdominal MRI dataset demonstrate that our method achieves favorable registration performance, while outperforming several CNN-based and Transformer-based registration networks.Our code is publicly available at https://github.com/JuliusWang-7/PAN.