 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEEG Foundation Models: Progresses, Benchmarking, and Open Problems
Jan 25, 2026Electroencephalography (EEG) foundation models have recently emerged as a promising paradigm for brain-computer interfaces (BCIs), aiming to learn transferable neural representations from large-scale heterogeneous recordings. Despite rapid progresses, there lacks fair and comprehensive comparisons of existing EEG foundation models, due to inconsistent pre-training objectives, preprocessing choices, and downstream evaluation protocols. This paper fills this gap. We first review 50 representative models and organize their design choices into a unified taxonomic framework including data standardization, model architectures, and self-supervised pre-training strategies. We then evaluate 12 open-source foundation models and competitive specialist baselines across 13 EEG datasets spanning nine BCI paradigms. Emphasizing real-world deployments, we consider both cross-subject generalization under a leave-one-subject-out protocol and rapid calibration under a within-subject few-shot setting. We further compare full-parameter fine-tuning with linear probing to assess the transferability of pre-trained representations, and examine the relationship between model scale and downstream performance. Our results indicate that: 1) linear probing is frequently insufficient; 2) specialist models trained from scratch remain competitive across many tasks; and, 3) larger foundation models do not necessarily yield better generalization performance under current data regimes and training practices.
MIRepNet: A Pipeline and Foundation Model for EEG-Based Motor Imagery Classification
Jul 27, 2025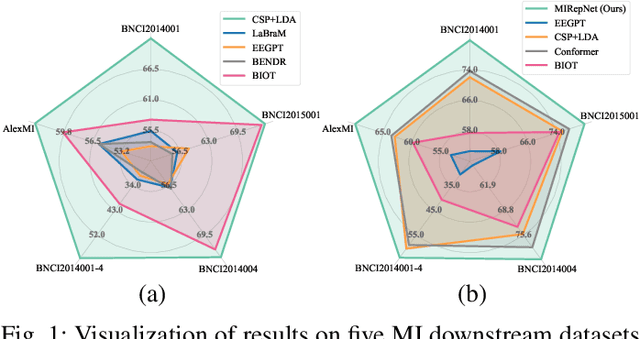
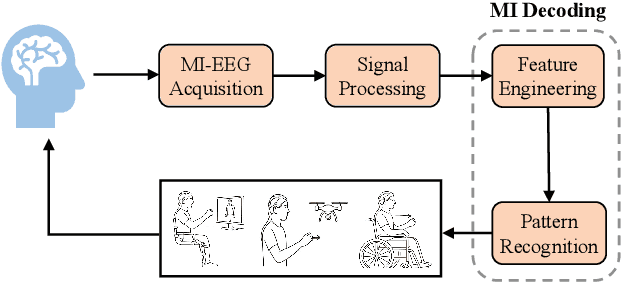
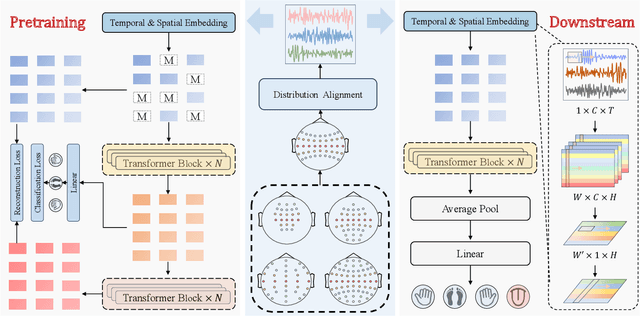
Brain-computer interfaces (BCIs) enable direct communication between the brain and external devices. Recent EEG foundation models aim to learn generalized representations across diverse BCI paradigms. However, these approaches overlook fundamental paradigm-specific neurophysiological distinctions, limiting their generalization ability. Importantly, in practical BCI deployments, the specific paradigm such as motor imagery (MI) for stroke rehabilitation or assistive robotics, is generally determined prior to data acquisition. This paper proposes MIRepNet, the first EEG foundation model tailored for the MI paradigm. MIRepNet comprises a high-quality EEG preprocessing pipeline incorporating a neurophysiologically-informed channel template, adaptable to EEG headsets with arbitrary electrode configurations. Furthermore, we introduce a hybrid pretraining strategy that combines self-supervised masked token reconstruction and supervised MI classification, facilitating rapid adaptation and accurate decoding on novel downstream MI tasks with fewer than 30 trials per class. Extensive evaluations across five public MI datasets demonstrated that MIRepNet consistently achieved state-of-the-art performance, significantly outperforming both specialized and generalized EEG models. Our code will be available on GitHub\footnote{https://github.com/staraink/MIRepNet}.
CLEAN-MI: A Scalable and Efficient Pipeline for Constructing High-Quality Neurodata in Motor Imagery Paradigm
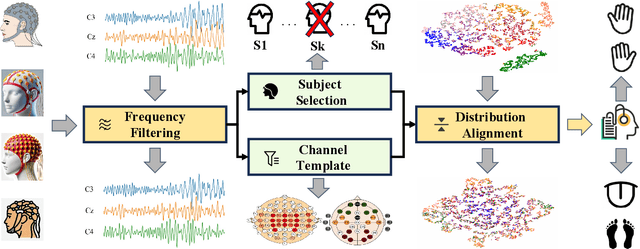
Jun 13, 2025The construction of large-scale, high-quality datasets is a fundamental prerequisite for developing robust and generalizable foundation models in motor imagery (MI)-based brain-computer interfaces (BCIs). However, EEG signals collected from different subjects and devices are often plagued by low signal-to-noise ratio, heterogeneity in electrode configurations, and substantial inter-subject variability, posing significant challenges for effective model training. In this paper, we propose CLEAN-MI, a scalable and systematic data construction pipeline for constructing large-scale, efficient, and accurate neurodata in the MI paradigm. CLEAN-MI integrates frequency band filtering, channel template selection, subject screening, and marginal distribution alignment to systematically filter out irrelevant or low-quality data and standardize multi-source EEG datasets. We demonstrate the effectiveness of CLEAN-MI on multiple public MI datasets, achieving consistent improvements in data quality and classification performance.
CellStyle: Improved Zero-Shot Cell Segmentation via Style Transfer
Mar 11, 2025Cell microscopy data are abundant; however, corresponding segmentation annotations remain scarce. Moreover, variations in cell types, imaging devices, and staining techniques introduce significant domain gaps between datasets. As a result, even large, pretrained segmentation models trained on diverse datasets (source datasets) struggle to generalize to unseen datasets (target datasets). To overcome this generalization problem, we propose CellStyle, which improves the segmentation quality of such models without requiring labels for the target dataset, thereby enabling zero-shot adaptation. CellStyle transfers the attributes of an unannotated target dataset, such as texture, color, and noise, to the annotated source dataset. This transfer is performed while preserving the cell shapes of the source images, ensuring that the existing source annotations can still be used while maintaining the visual characteristics of the target dataset. The styled synthetic images with the existing annotations enable the finetuning of a generalist segmentation model for application to the unannotated target data. We demonstrate that CellStyle significantly improves zero-shot cell segmentation performance across diverse datasets by finetuning multiple segmentation models on the style-transferred data. The code will be made publicly available.
Unsupervised Learning for Feature Extraction and Temporal Alignment of 3D+t Point Clouds of Zebrafish Embryos
Feb 10, 2025Zebrafish are widely used in biomedical research and developmental stages of their embryos often need to be synchronized for further analysis. We present an unsupervised approach to extract descriptive features from 3D+t point clouds of zebrafish embryos and subsequently use those features to temporally align corresponding developmental stages. An autoencoder architecture is proposed to learn a descriptive representation of the point clouds and we designed a deep regression network for their temporal alignment. We achieve a high alignment accuracy with an average mismatch of only 3.83 minutes over an experimental duration of 5.3 hours. As a fully-unsupervised approach, there is no manual labeling effort required and unlike manual analyses the method easily scales. Besides, the alignment without human annotation of the data also avoids any influence caused by subjective bias.
No Free Lunch in Annotation either: An objective evaluation of foundation models for streamlining annotation in animal tracking
Feb 06, 2025We analyze the capabilities of foundation models addressing the tedious task of generating annotations for animal tracking. Annotating a large amount of data is vital and can be a make-or-break factor for the robustness of a tracking model. Robustness is particularly crucial in animal tracking, as accurate tracking over long time horizons is essential for capturing the behavior of animals. However, generating additional annotations using foundation models can be counterproductive, as the quality of the annotations is just as important. Poorly annotated data can introduce noise and inaccuracies, ultimately compromising the performance and accuracy of the trained model. Over-reliance on automated annotations without ensuring precision can lead to diminished results, making careful oversight and quality control essential in the annotation process. Ultimately, we demonstrate that a thoughtful combination of automated annotations and manually annotated data is a valuable strategy, yielding an IDF1 score of 80.8 against blind usage of SAM2 video with an IDF1 score of 65.6.
From Galaxy Zoo DECaLS to BASS/MzLS: detailed galaxy morphology classification with unsupervised domain adaption
Dec 20, 2024



The DESI Legacy Imaging Surveys (DESI-LIS) comprise three distinct surveys: the Dark Energy Camera Legacy Survey (DECaLS), the Beijing-Arizona Sky Survey (BASS), and the Mayall z-band Legacy Survey (MzLS). The citizen science project Galaxy Zoo DECaLS 5 (GZD-5) has provided extensive and detailed morphology labels for a sample of 253,287 galaxies within the DECaLS survey. This dataset has been foundational for numerous deep learning-based galaxy morphology classification studies. However, due to differences in signal-to-noise ratios and resolutions between the DECaLS images and those from BASS and MzLS (collectively referred to as BMz), a neural network trained on DECaLS images cannot be directly applied to BMz images due to distributional mismatch. In this study, we explore an unsupervised domain adaptation (UDA) method that fine-tunes a source domain model trained on DECaLS images with GZD-5 labels to BMz images, aiming to reduce bias in galaxy morphology classification within the BMz survey. Our source domain model, used as a starting point for UDA, achieves performance on the DECaLS galaxies' validation set comparable to the results of related works. For BMz galaxies, the fine-tuned target domain model significantly improves performance compared to the direct application of the source domain model, reaching a level comparable to that of the source domain. We also release a catalogue of detailed morphology classifications for 248,088 galaxies within the BMz survey, accompanied by usage recommendations.
Improving Disturbance Estimation and Suppression via Learning among Systems with Mismatched Dynamics
Apr 16, 2024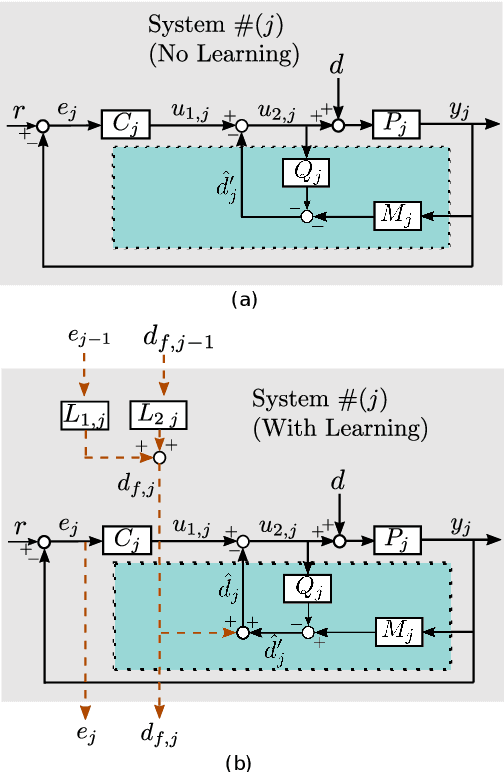
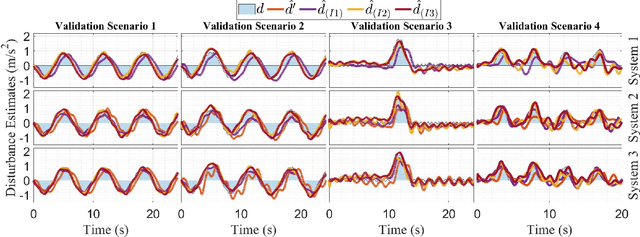
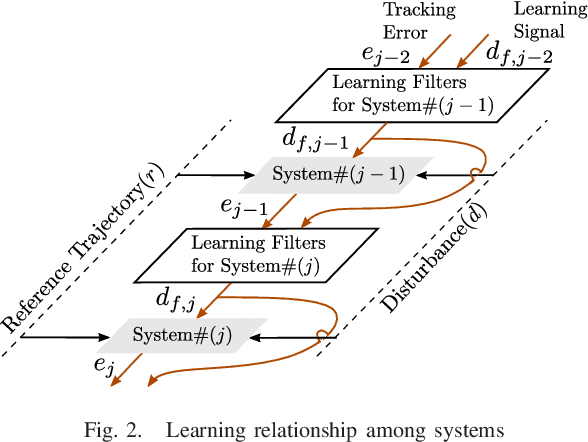
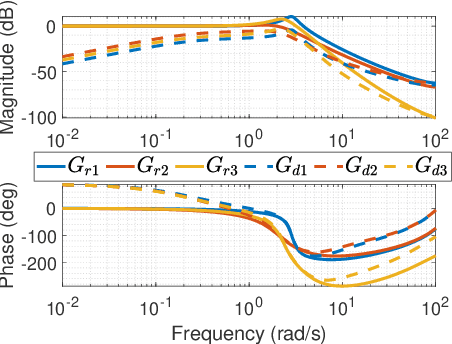
Iterative learning control (ILC) is a method for reducing system tracking or estimation errors over multiple iterations by using information from past iterations. The disturbance observer (DOB) is used to estimate and mitigate disturbances within the system, while the system is being affected by them. ILC enhances system performance by introducing a feedforward signal in each iteration. However, its effectiveness may diminish if the conditions change during the iterations. On the other hand, although DOB effectively mitigates the effects of new disturbances, it cannot entirely eliminate them as it operates reactively. Therefore, neither ILC nor DOB alone can ensure sufficient robustness in challenging scenarios. This study focuses on the simultaneous utilization of ILC and DOB to enhance system robustness. The proposed methodology specifically targets dynamically different linearized systems performing repetitive tasks. The systems share similar forms but differ in dynamics (e.g. sizes, masses, and controllers). Consequently, the design of learning filters must account for these differences in dynamics. To validate the approach, the study establishes a theoretical framework for designing learning filters in conjunction with DOB. The validity of the framework is then confirmed through numerical studies and experimental tests conducted on unmanned aerial vehicles (UAVs). Although UAVs are nonlinear systems, the study employs a linearized controller as they operate in proximity to the hover condition. A video introduction of this paper is available via this link: https://zh.engr.tamu.edu/wp-content/uploads/sites/310/2024/02/ILCDOB_v3f.mp4.
From Images to Features: Unbiased Morphology Classification via Variational Auto-Encoders and Domain Adaptation
Mar 15, 2023We present a novel approach for the dimensionality reduction of galaxy images by leveraging a combination of variational auto-encoders (VAE) and domain adaptation (DA). We demonstrate the effectiveness of this approach using a sample of low redshift galaxies with detailed morphological type labels from the Galaxy-Zoo DECaLS project. We show that 40-dimensional latent variables can effectively reproduce most morphological features in galaxy images. To further validate the effectiveness of our approach, we utilised a classical random forest (RF) classifier on the 40-dimensional latent variables to make detailed morphology feature classifications. This approach performs similarly to a direct neural network application on galaxy images. We further enhance our model by tuning the VAE network via DA using galaxies in the overlapping footprint of DECaLS and BASS+MzLS, enabling the unbiased application of our model to galaxy images in both surveys. We observed that noise suppression during DA led to even better morphological feature extraction and classification performance. Overall, this combination of VAE and DA can be applied to achieve image dimensionality reduction, defect image identification, and morphology classification in large optical surveys.
Including Image-based Perception in Disturbance Observer for Warehouse Drones
Jul 06, 2020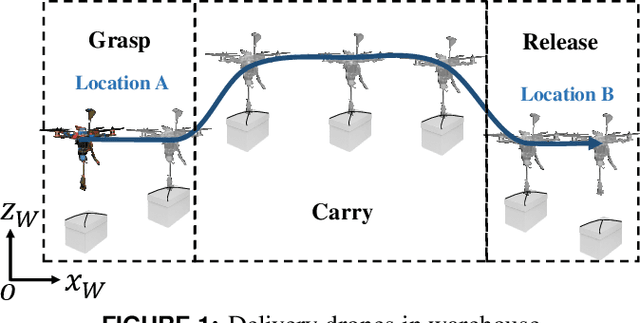
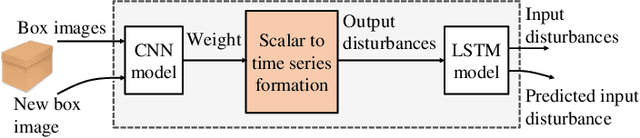


Grasping and releasing objects would cause oscillations to delivery drones in the warehouse. To reduce such undesired oscillations, this paper treats the to-be-delivered object as an unknown external disturbance and presents an image-based disturbance observer (DOB) to estimate and reject such disturbance. Different from the existing DOB technique that can only compensate for the disturbance after the oscillations happen, the proposed image-based one incorporates image-based disturbance prediction into the control loop to further improve the performance of the DOB. The proposed image-based DOB consists of two parts. The first one is deep-learning-based disturbance prediction. By taking an image of the to-be-delivered object, a sequential disturbance signal is predicted in advance using a connected pre-trained convolutional neural network (CNN) and a long short-term memory (LSTM) network. The second part is a conventional DOB in the feedback loop with a feedforward correction, which utilizes the deep learning prediction to generate a learning signal. Numerical studies are performed to validate the proposed image-based DOB regarding oscillation reduction for delivery drones during the grasping and releasing periods of the objects.