 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Galaxy Zoo DECaLS to BASS/MzLS: detailed galaxy morphology classification with unsupervised domain adaption
Dec 20, 2024



The DESI Legacy Imaging Surveys (DESI-LIS) comprise three distinct surveys: the Dark Energy Camera Legacy Survey (DECaLS), the Beijing-Arizona Sky Survey (BASS), and the Mayall z-band Legacy Survey (MzLS). The citizen science project Galaxy Zoo DECaLS 5 (GZD-5) has provided extensive and detailed morphology labels for a sample of 253,287 galaxies within the DECaLS survey. This dataset has been foundational for numerous deep learning-based galaxy morphology classification studies. However, due to differences in signal-to-noise ratios and resolutions between the DECaLS images and those from BASS and MzLS (collectively referred to as BMz), a neural network trained on DECaLS images cannot be directly applied to BMz images due to distributional mismatch. In this study, we explore an unsupervised domain adaptation (UDA) method that fine-tunes a source domain model trained on DECaLS images with GZD-5 labels to BMz images, aiming to reduce bias in galaxy morphology classification within the BMz survey. Our source domain model, used as a starting point for UDA, achieves performance on the DECaLS galaxies' validation set comparable to the results of related works. For BMz galaxies, the fine-tuned target domain model significantly improves performance compared to the direct application of the source domain model, reaching a level comparable to that of the source domain. We also release a catalogue of detailed morphology classifications for 248,088 galaxies within the BMz survey, accompanied by usage recommendations.
From Images to Features: Unbiased Morphology Classification via Variational Auto-Encoders and Domain Adaptation
Mar 15, 2023We present a novel approach for the dimensionality reduction of galaxy images by leveraging a combination of variational auto-encoders (VAE) and domain adaptation (DA). We demonstrate the effectiveness of this approach using a sample of low redshift galaxies with detailed morphological type labels from the Galaxy-Zoo DECaLS project. We show that 40-dimensional latent variables can effectively reproduce most morphological features in galaxy images. To further validate the effectiveness of our approach, we utilised a classical random forest (RF) classifier on the 40-dimensional latent variables to make detailed morphology feature classifications. This approach performs similarly to a direct neural network application on galaxy images. We further enhance our model by tuning the VAE network via DA using galaxies in the overlapping footprint of DECaLS and BASS+MzLS, enabling the unbiased application of our model to galaxy images in both surveys. We observed that noise suppression during DA led to even better morphological feature extraction and classification performance. Overall, this combination of VAE and DA can be applied to achieve image dimensionality reduction, defect image identification, and morphology classification in large optical surveys.
A2D2: Audi Autonomous Driving Dataset
Apr 14, 2020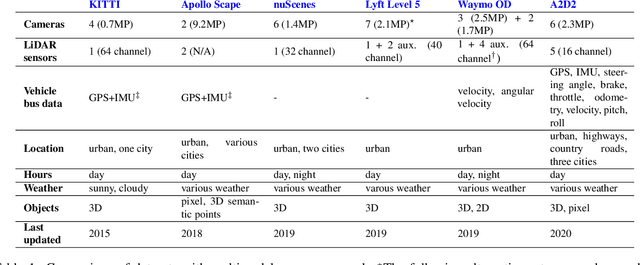
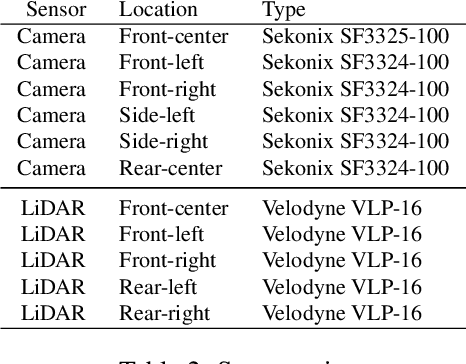
Research in machine learning, mobile robotics, and autonomous driving is accelerated by the availability of high quality annotated data. To this end, we release the Audi Autonomous Driving Dataset (A2D2). Our dataset consists of simultaneously recorded images and 3D point clouds, together with 3D bounding boxes, semantic segmentation, instance segmentation, and data extracted from the automotive bus. Our sensor suite consists of six cameras and five LiDAR units, providing full 360 degree coverage. The recorded data is time synchronized and mutually registered. Annotations are for non-sequential frames: 41,277 frames with semantic segmentation image and point cloud labels, of which 12,497 frames also have 3D bounding box annotations for objects within the field of view of the front camera. In addition, we provide 392,556 sequential frames of unannotated sensor data for recordings in three cities in the south of Germany. These sequences contain several loops. Faces and vehicle number plates are blurred due to GDPR legislation and to preserve anonymity. A2D2 is made available under the CC BY-ND 4.0 license, permitting commercial use subject to the terms of the license. Data and further information are available at http://www.a2d2.audi.