 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Galaxy Zoo DECaLS to BASS/MzLS: detailed galaxy morphology classification with unsupervised domain adaption
Dec 20, 2024



The DESI Legacy Imaging Surveys (DESI-LIS) comprise three distinct surveys: the Dark Energy Camera Legacy Survey (DECaLS), the Beijing-Arizona Sky Survey (BASS), and the Mayall z-band Legacy Survey (MzLS). The citizen science project Galaxy Zoo DECaLS 5 (GZD-5) has provided extensive and detailed morphology labels for a sample of 253,287 galaxies within the DECaLS survey. This dataset has been foundational for numerous deep learning-based galaxy morphology classification studies. However, due to differences in signal-to-noise ratios and resolutions between the DECaLS images and those from BASS and MzLS (collectively referred to as BMz), a neural network trained on DECaLS images cannot be directly applied to BMz images due to distributional mismatch. In this study, we explore an unsupervised domain adaptation (UDA) method that fine-tunes a source domain model trained on DECaLS images with GZD-5 labels to BMz images, aiming to reduce bias in galaxy morphology classification within the BMz survey. Our source domain model, used as a starting point for UDA, achieves performance on the DECaLS galaxies' validation set comparable to the results of related works. For BMz galaxies, the fine-tuned target domain model significantly improves performance compared to the direct application of the source domain model, reaching a level comparable to that of the source domain. We also release a catalogue of detailed morphology classifications for 248,088 galaxies within the BMz survey, accompanied by usage recommendations.
DeRainGS: Gaussian Splatting for Enhanced Scene Reconstruction in Rainy Environments
Aug 22, 2024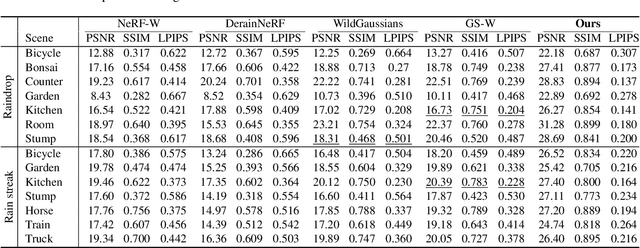
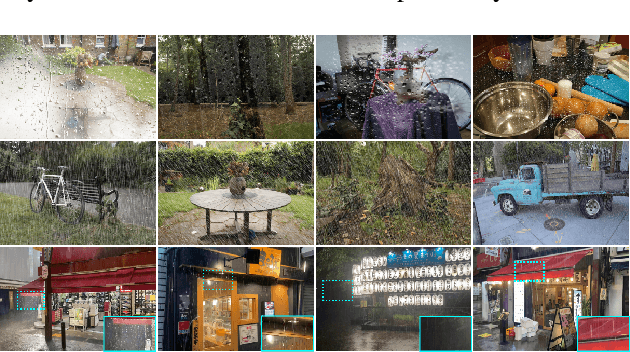

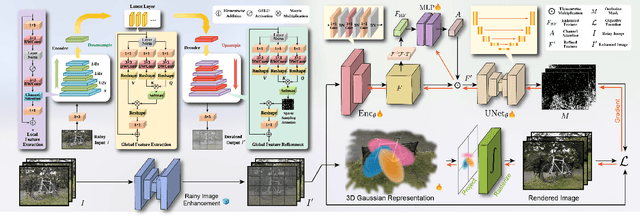
Reconstruction under adverse rainy conditions poses significant challenges due to reduced visibility and the distortion of visual perception. These conditions can severely impair the quality of geometric maps, which is essential for applications ranging from autonomous planning to environmental monitoring. In response to these challenges, this study introduces the novel task of 3D Reconstruction in Rainy Environments (3DRRE), specifically designed to address the complexities of reconstructing 3D scenes under rainy conditions. To benchmark this task, we construct the HydroViews dataset that comprises a diverse collection of both synthesized and real-world scene images characterized by various intensities of rain streaks and raindrops. Furthermore, we propose DeRainGS, the first 3DGS method tailored for reconstruction in adverse rainy environments. Extensive experiments across a wide range of rain scenarios demonstrate that our method delivers state-of-the-art performance, remarkably outperforming existing occlusion-free methods.
From Images to Features: Unbiased Morphology Classification via Variational Auto-Encoders and Domain Adaptation
Mar 15, 2023We present a novel approach for the dimensionality reduction of galaxy images by leveraging a combination of variational auto-encoders (VAE) and domain adaptation (DA). We demonstrate the effectiveness of this approach using a sample of low redshift galaxies with detailed morphological type labels from the Galaxy-Zoo DECaLS project. We show that 40-dimensional latent variables can effectively reproduce most morphological features in galaxy images. To further validate the effectiveness of our approach, we utilised a classical random forest (RF) classifier on the 40-dimensional latent variables to make detailed morphology feature classifications. This approach performs similarly to a direct neural network application on galaxy images. We further enhance our model by tuning the VAE network via DA using galaxies in the overlapping footprint of DECaLS and BASS+MzLS, enabling the unbiased application of our model to galaxy images in both surveys. We observed that noise suppression during DA led to even better morphological feature extraction and classification performance. Overall, this combination of VAE and DA can be applied to achieve image dimensionality reduction, defect image identification, and morphology classification in large optical surveys.
Unsupervised Capsule Networks of High-Dimension Point Clouds classification
Jun 15, 2022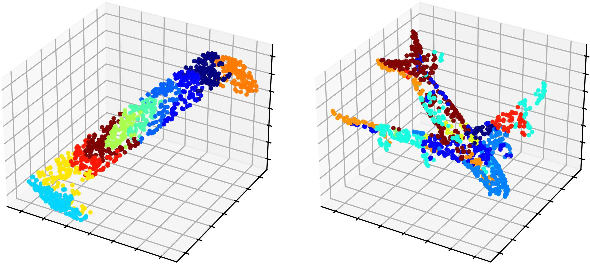
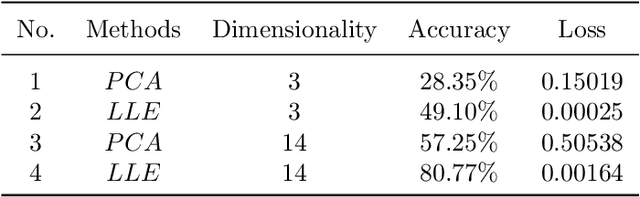
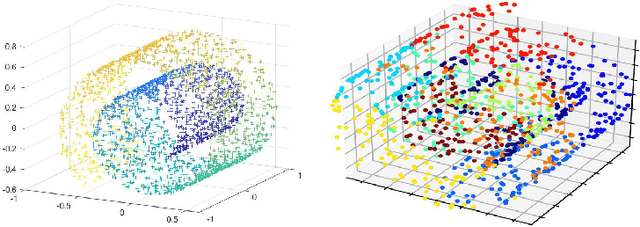
Three-dimensional point clouds learning is widely applied, but the point clouds are still unable to deal with classification and recognition tasks satisfactorily in the cases of irregular geometric structures and high-dimensional space. In 3D space, point clouds tend to have regular Euclidean structure because of their density. On the contrary, due to the high dimensionality, the spatial structure of high-dimensional space is more complex, and point clouds are mostly presented in non-European structure. Furthermore, among current 3D point clouds classification algorithms, Canonical Capsules algorithm based on Euclidean distance is difficult to decompose and identify non-Euclidean structures effectively. Thus, aiming at the point clouds classification task of non-Euclidean structure in 3D and high-dimensional space, this paper refers to the LLE algorithm based on geodesic distance for optimizing and proposes the unsupervised algorithm of high-dimensional point clouds capsule. In this paper, the geometric features of point clouds are considered in the extraction process, so as to transform the high-dimensional non-Euclidean structure into a lower-dimensional Euclidean structure with retaining spatial geometric features. To verify the feasibility of the unsupervised algorithm of high-dimensional point clouds capsule, experiments are conducted in Swiss Roll dataset, point clouds MNIST dataset and point clouds LFW dataset. The results show that (1) non-Euclidean structures can be can effectively identified by this model in Swiss Roll dataset; (2) a significant unsupervised learning effect is realized in point clouds MNIST dataset. In conclusion, the high-dimensional point clouds capsule unsupervised algorithm proposed in this paper is conducive to expand the application scenarios of current point clouds classification and recognition tasks.