 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA2D2: Audi Autonomous Driving Dataset
Apr 14, 2020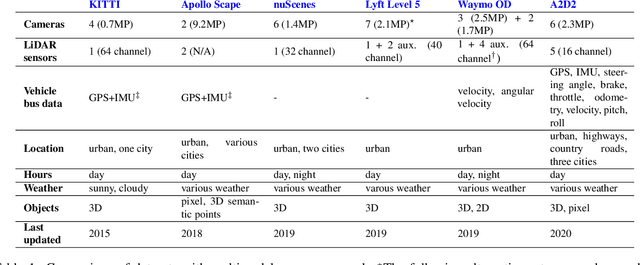
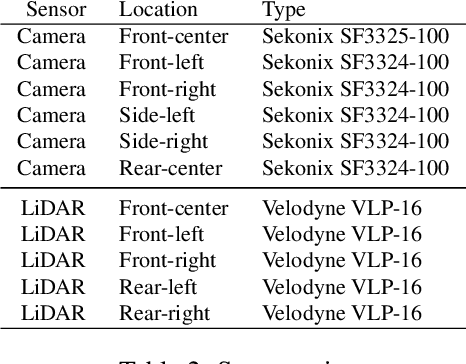
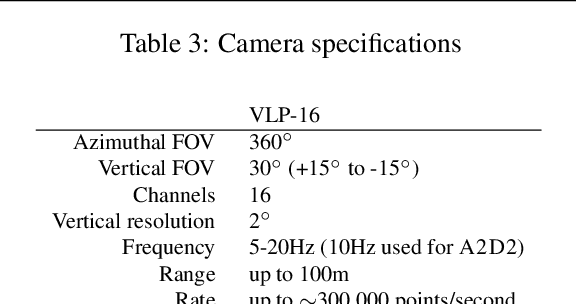
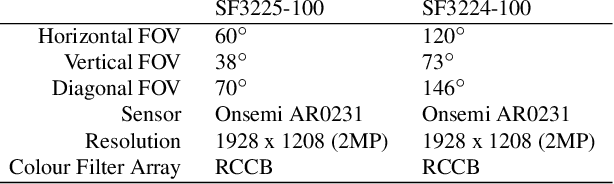
Research in machine learning, mobile robotics, and autonomous driving is accelerated by the availability of high quality annotated data. To this end, we release the Audi Autonomous Driving Dataset (A2D2). Our dataset consists of simultaneously recorded images and 3D point clouds, together with 3D bounding boxes, semantic segmentation, instance segmentation, and data extracted from the automotive bus. Our sensor suite consists of six cameras and five LiDAR units, providing full 360 degree coverage. The recorded data is time synchronized and mutually registered. Annotations are for non-sequential frames: 41,277 frames with semantic segmentation image and point cloud labels, of which 12,497 frames also have 3D bounding box annotations for objects within the field of view of the front camera. In addition, we provide 392,556 sequential frames of unannotated sensor data for recordings in three cities in the south of Germany. These sequences contain several loops. Faces and vehicle number plates are blurred due to GDPR legislation and to preserve anonymity. A2D2 is made available under the CC BY-ND 4.0 license, permitting commercial use subject to the terms of the license. Data and further information are available at http://www.a2d2.audi.
Human-Machine Collaborative Design for Accelerated Design of Compact Deep Neural Networks for Autonomous Driving
Sep 12, 2019



An effective deep learning development process is critical for widespread industrial adoption, particularly in the automotive sector. A typical industrial deep learning development cycle involves customizing and re-designing an off-the-shelf network architecture to meet the operational requirements of the target application, leading to considerable trial and error work by a machine learning practitioner. This approach greatly impedes development with a long turnaround time and the unsatisfactory quality of the created models. As a result, a development platform that can aid engineers in greatly accelerating the design and production of compact, optimized deep neural networks is highly desirable. In this joint industrial case study, we study the efficacy of the GenSynth AI-assisted AI design platform for accelerating the design of custom, optimized deep neural networks for autonomous driving through human-machine collaborative design. We perform a quantitative examination by evaluating 10 different compact deep neural networks produced by GenSynth for the purpose of object detection via a NASNet-based user network prototype design, targeted at a low-cost GPU-based accelerated embedded system. Furthermore, we quantitatively assess the talent hours and GPU processing hours used by the GenSynth process and three other approaches based on the typical industrial development process. In addition, we quantify the annual cloud cost savings for comprehensive testing using networks produced by GenSynth. Finally, we assess the usability and merits of the GenSynth process through user feedback. The findings of this case study showed that GenSynth is easy to use and can be effective at accelerating the design and production of compact, customized deep neural network.
Dynamic Motion Modelling for Legged Robots
May 27, 2010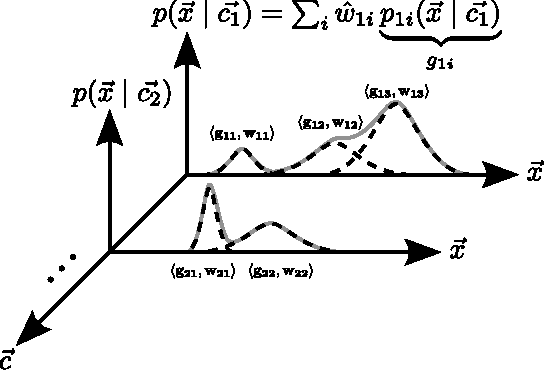

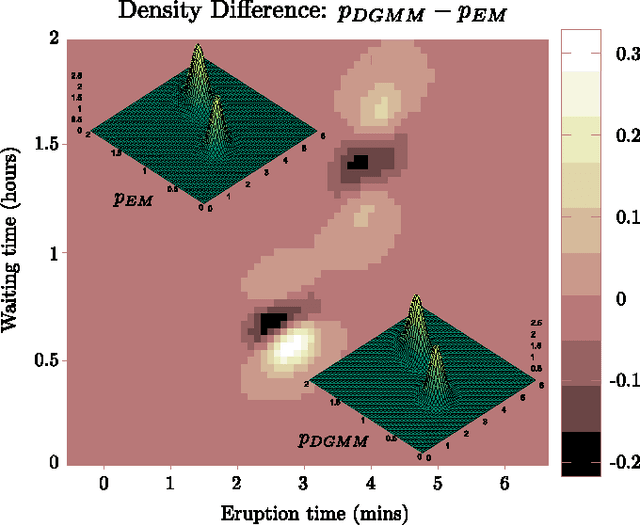

An accurate motion model is an important component in modern-day robotic systems, but building such a model for a complex system often requires an appreciable amount of manual effort. In this paper we present a motion model representation, the Dynamic Gaussian Mixture Model (DGMM), that alleviates the need to manually design the form of a motion model, and provides a direct means of incorporating auxiliary sensory data into the model. This representation and its accompanying algorithms are validated experimentally using an 8-legged kinematically complex robot, as well as a standard benchmark dataset. The presented method not only learns the robot's motion model, but also improves the model's accuracy by incorporating information about the terrain surrounding the robot.