 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Disentangle Causal Model: Enhancing Causal Inference in Networked Observational Data
Dec 05, 2024



Estimating individual treatment effects (ITE) from observational data is a critical task across various domains. However, many existing works on ITE estimation overlook the influence of hidden confounders, which remain unobserved at the individual unit level. To address this limitation, researchers have utilized graph neural networks to aggregate neighbors' features to capture the hidden confounders and mitigate confounding bias by minimizing the discrepancy of confounder representations between the treated and control groups. Despite the success of these approaches, practical scenarios often treat all features as confounders and involve substantial differences in feature distributions between the treated and control groups. Confusing the adjustment and confounder and enforcing strict balance on the confounder representations could potentially undermine the effectiveness of outcome prediction. To mitigate this issue, we propose a novel framework called the \textit{Graph Disentangle Causal model} (GDC) to conduct ITE estimation in the network setting. GDC utilizes a causal disentangle module to separate unit features into adjustment and confounder representations. Then we design a graph aggregation module consisting of three distinct graph aggregators to obtain adjustment, confounder, and counterfactual confounder representations. Finally, a causal constraint module is employed to enforce the disentangled representations as true causal factors. The effectiveness of our proposed method is demonstrated by conducting comprehensive experiments on two networked datasets.
Robust Model-based Reinforcement Learning for Autonomous Greenhouse Control
Aug 26, 2021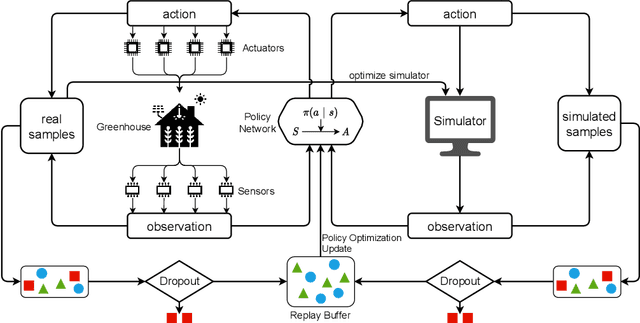
Due to the high efficiency and less weather dependency, autonomous greenhouses provide an ideal solution to meet the increasing demand for fresh food. However, managers are faced with some challenges in finding appropriate control strategies for crop growth, since the decision space of the greenhouse control problem is an astronomical number. Therefore, an intelligent closed-loop control framework is highly desired to generate an automatic control policy. As a powerful tool for optimal control, reinforcement learning (RL) algorithms can surpass human beings' decision-making and can also be seamlessly integrated into the closed-loop control framework. However, in complex real-world scenarios such as agricultural automation control, where the interaction with the environment is time-consuming and expensive, the application of RL algorithms encounters two main challenges, i.e., sample efficiency and safety. Although model-based RL methods can greatly mitigate the efficiency problem of greenhouse control, the safety problem has not got too much attention. In this paper, we present a model-based robust RL framework for autonomous greenhouse control to meet the sample efficiency and safety challenges. Specifically, our framework introduces an ensemble of environment models to work as a simulator and assist in policy optimization, thereby addressing the low sample efficiency problem. As for the safety concern, we propose a sample dropout module to focus more on worst-case samples, which can help improve the adaptability of the greenhouse planting policy in extreme cases. Experimental results demonstrate that our approach can learn a more effective greenhouse planting policy with better robustness than existing methods.
IGrow: A Smart Agriculture Solution to Autonomous Greenhouse Control
Jul 06, 2021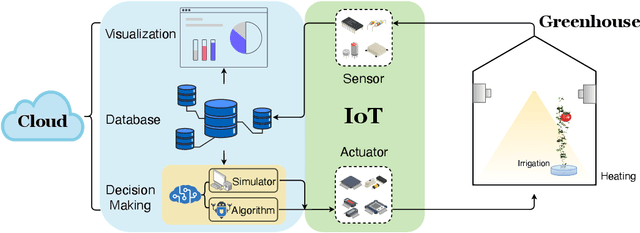
Agriculture is the foundation of human civilization. However, the rapid increase and aging of the global population pose challenges on this cornerstone by demanding more healthy and fresh food. Internet of Things (IoT) technology makes modern autonomous greenhouse a viable and reliable engine of food production. However, the educated and skilled labor capable of overseeing high-tech greenhouses is scarce. Artificial intelligence (AI) and cloud computing technologies are promising solutions for precision control and high-efficiency production in such controlled environments. In this paper, we propose a smart agriculture solution, namely iGrow: (1) we use IoT and cloud computing technologies to measure, collect, and manage growing data, to support iteration of our decision-making AI module, which consists of an incremental model and an optimization algorithm; (2) we propose a three-stage incremental model based on accumulating data, enabling growers/central computers to schedule control strategies conveniently and at low cost; (3) we propose a model-based iterative optimization algorithm, which can dynamically optimize the greenhouse control strategy in real-time production. In the simulated experiment, evaluation results show the accuracy of our incremental model is comparable to an advanced tomato simulator, while our optimization algorithms can beat the champion of the 2nd Autonomous Greenhouse Challenge. Compelling results from the A/B test in real greenhouses demonstrate that our solution significantly increases production (commercially sellable fruits) (+ 10.15%) and net profit (+ 87.07%) with statistical significance compared to planting experts.
Sample Efficient Reinforcement Learning via Model-Ensemble Exploration and Exploitation
Jul 05, 2021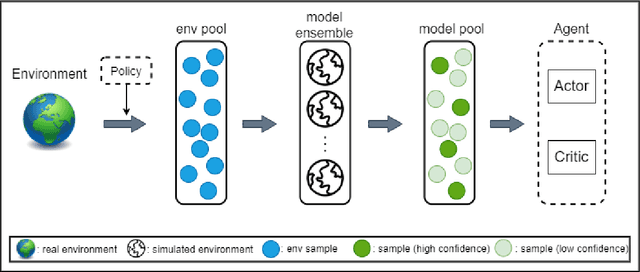
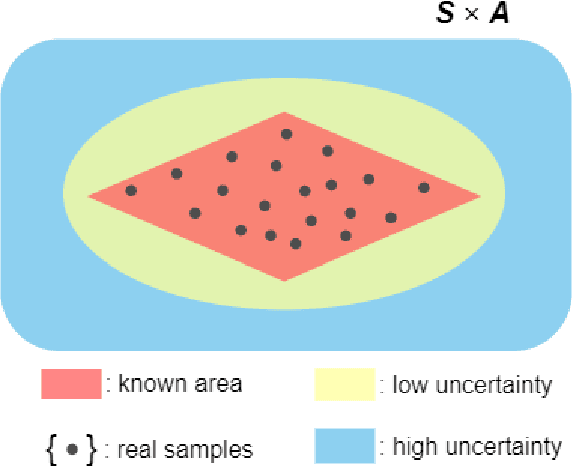
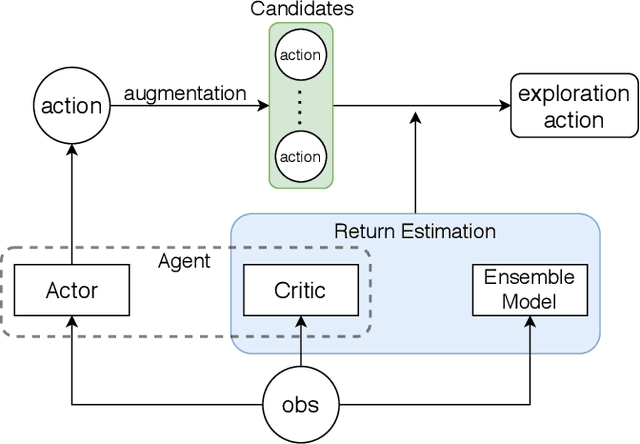
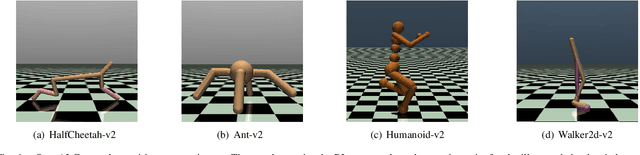
Model-based deep reinforcement learning has achieved success in various domains that require high sample efficiencies, such as Go and robotics. However, there are some remaining issues, such as planning efficient explorations to learn more accurate dynamic models, evaluating the uncertainty of the learned models, and more rational utilization of models. To mitigate these issues, we present MEEE, a model-ensemble method that consists of optimistic exploration and weighted exploitation. During exploration, unlike prior methods directly selecting the optimal action that maximizes the expected accumulative return, our agent first generates a set of action candidates and then seeks out the optimal action that takes both expected return and future observation novelty into account. During exploitation, different discounted weights are assigned to imagined transition tuples according to their model uncertainty respectively, which will prevent model predictive error propagation in agent training. Experiments on several challenging continuous control benchmark tasks demonstrated that our approach outperforms other model-free and model-based state-of-the-art methods, especially in sample complexity.