 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe First WARA Robotics Mobile Manipulation Challenge -- Lessons Learned
May 11, 2025The first WARA Robotics Mobile Manipulation Challenge, held in December 2024 at ABB Corporate Research in V\"aster{\aa}s, Sweden, addressed the automation of task-intensive and repetitive manual labor in laboratory environments - specifically the transport and cleaning of glassware. Designed in collaboration with AstraZeneca, the challenge invited academic teams to develop autonomous robotic systems capable of navigating human-populated lab spaces and performing complex manipulation tasks, such as loading items into industrial dishwashers. This paper presents an overview of the challenge setup, its industrial motivation, and the four distinct approaches proposed by the participating teams. We summarize lessons learned from this edition and propose improvements in design to enable a more effective second iteration to take place in 2025. The initiative bridges an important gap in effective academia-industry collaboration within the domain of autonomous mobile manipulation systems by promoting the development and deployment of applied robotic solutions in real-world laboratory contexts.
Multi-Agent Simulator Drives Language Models for Legal Intensive Interaction
Feb 08, 2025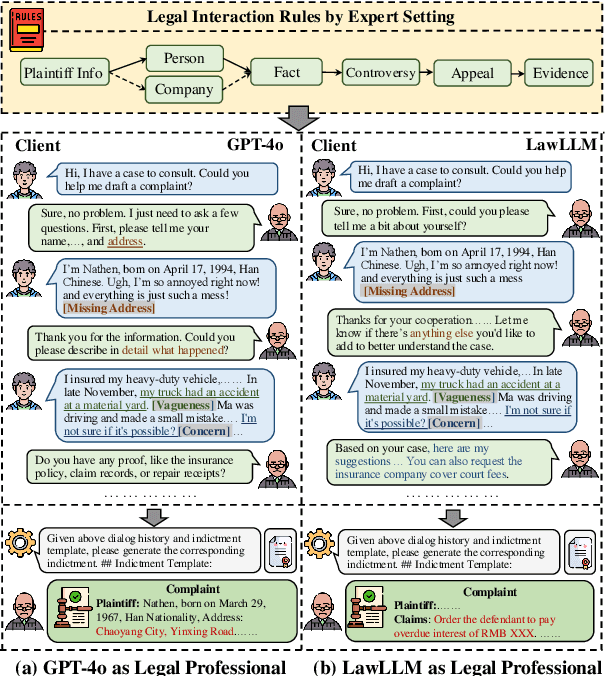
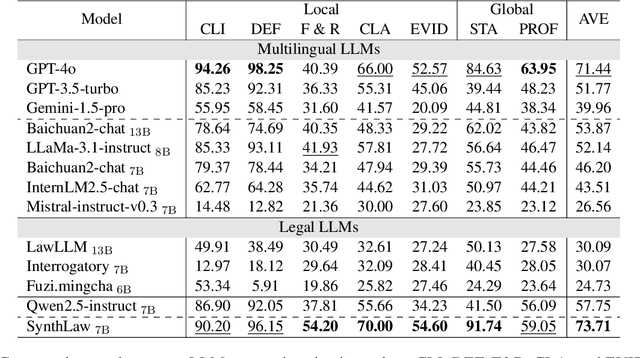
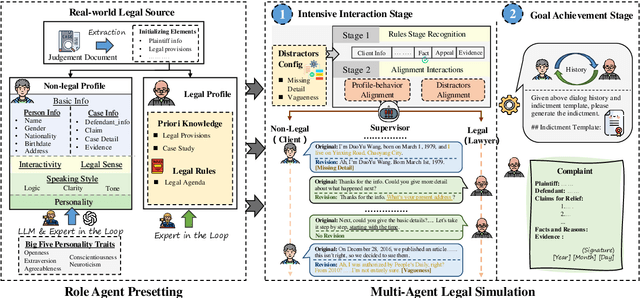
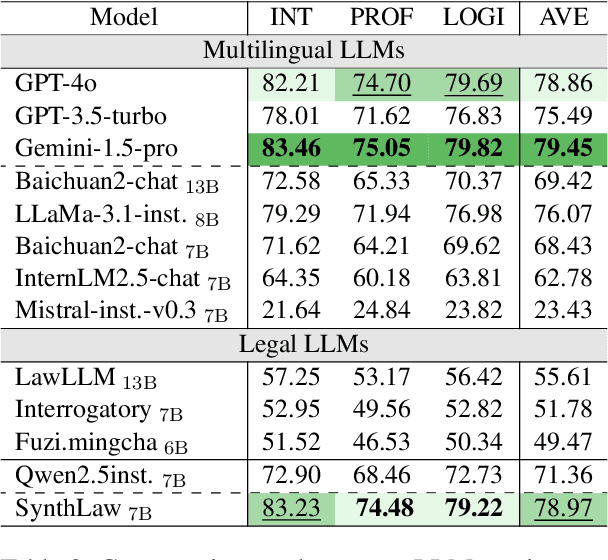
Large Language Models (LLMs) have significantly advanced legal intelligence, but the scarcity of scenario data impedes the progress toward interactive legal scenarios. This paper introduces a Multi-agent Legal Simulation Driver (MASER) to scalably generate synthetic data by simulating interactive legal scenarios. Leveraging real-legal case sources, MASER ensures the consistency of legal attributes between participants and introduces a supervisory mechanism to align participants' characters and behaviors as well as addressing distractions. A Multi-stage Interactive Legal Evaluation (MILE) benchmark is further constructed to evaluate LLMs' performance in dynamic legal scenarios. Extensive experiments confirm the effectiveness of our framework.
The Wheelbot: A Jumping Reaction Wheel Unicycle
Jul 14, 2022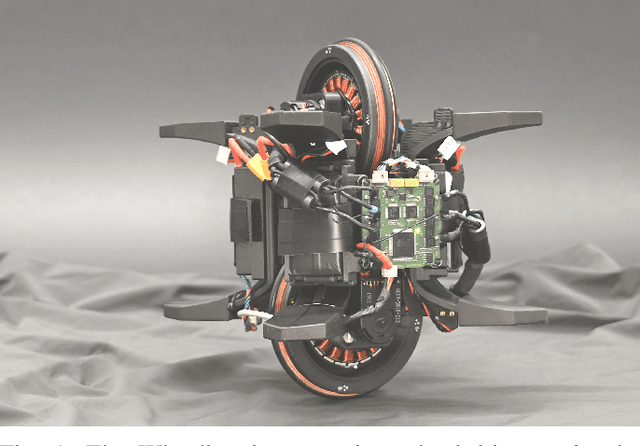
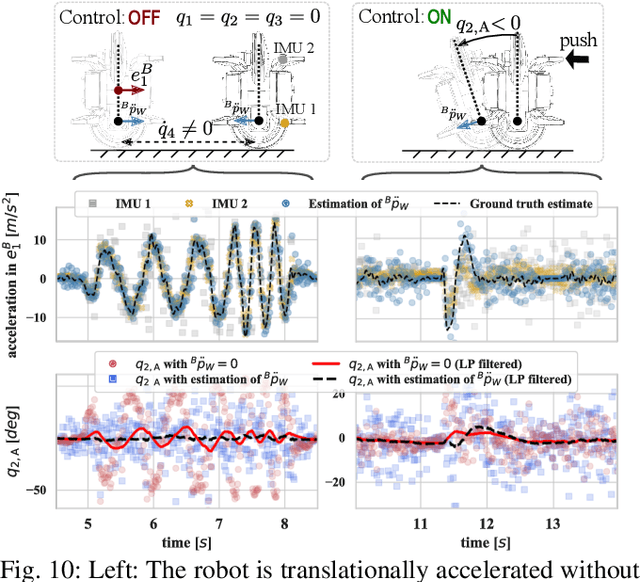
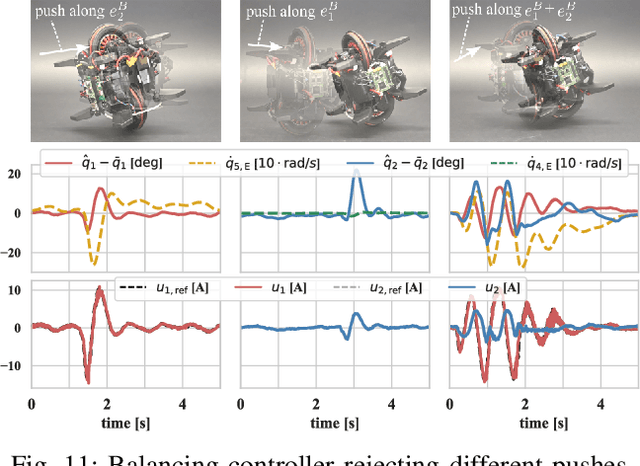

Combining off-the-shelf components with 3Dprinting, the Wheelbot is a symmetric reaction wheel unicycle that can jump onto its wheels from any initial position. With non-holonomic and under-actuated dynamics, as well as two coupled unstable degrees of freedom, the Wheelbot provides a challenging platform for nonlinear and data-driven control research. This paper presents the Wheelbot's mechanical and electrical design, its estimation and control algorithms, as well as experiments demonstrating both self-erection and disturbance rejection while balancing.
Distributed Estimation, Control and Coordination of Quadcopter Swarm Robots
Feb 14, 2021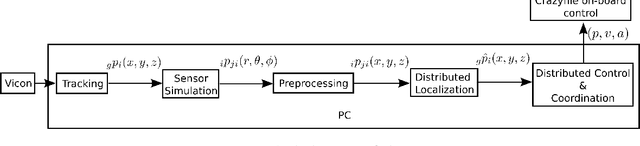
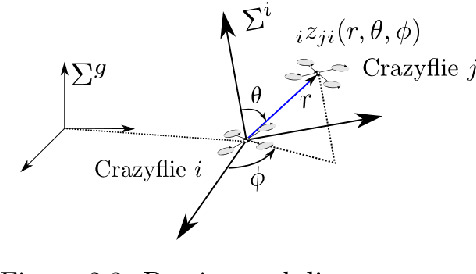
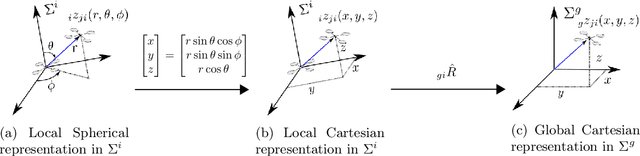
In this thesis we are interested in applying distributed estimation, control and optimization techniques to enable a group of quadcopters to fly through openings. The quadcopters are assumed to be equipped with a simulated bearing and distance sensor for localization. Some quadcopters are designated as leaders who carry global position sensors. We assume quadcopters can communicate information with each other.