 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Robust Open-source Tendon-driven Robot Arm for Learning Control of Dynamic Motions
Jul 10, 2023



A long-lasting goal of robotics research is to operate robots safely, while achieving high performance which often involves fast motions. Traditional motor-driven systems frequently struggle to balance these competing demands. Addressing this trade-off is crucial for advancing fields such as manufacturing and healthcare, where seamless collaboration between robots and humans is essential. We introduce a four degree-of-freedom (DoF) tendon-driven robot arm, powered by pneumatic artificial muscles (PAMs), to tackle this challenge. Our new design features low friction, passive compliance, and inherent impact resilience, enabling rapid, precise, high-force, and safe interactions during dynamic tasks. In addition to fostering safer human-robot collaboration, the inherent safety properties are particularly beneficial for reinforcement learning, where the robot's ability to explore dynamic motions without causing self-damage is crucial. We validate our robotic arm through various experiments, including long-term dynamic motions, impact resilience tests, and assessments of its ease of control. On a challenging dynamic table tennis task, we further demonstrate our robot's capabilities in rapid and precise movements. By showcasing our new design's potential, we aim to inspire further research on robotic systems that balance high performance and safety in diverse tasks. Our open-source hardware design, software, and a large dataset of diverse robot motions can be found at https://webdav.tuebingen.mpg.de/pamy2/.
The Wheelbot: A Jumping Reaction Wheel Unicycle
Jul 14, 2022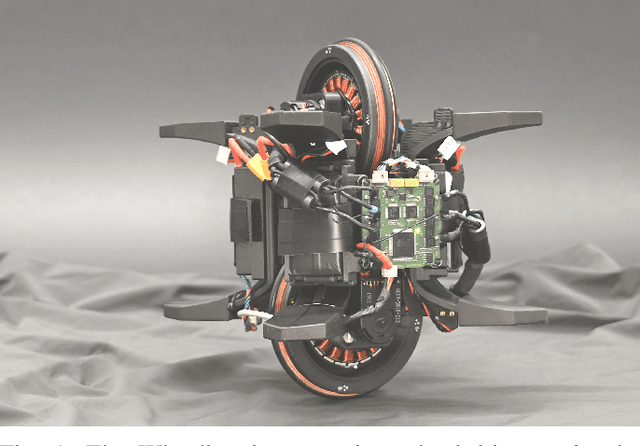
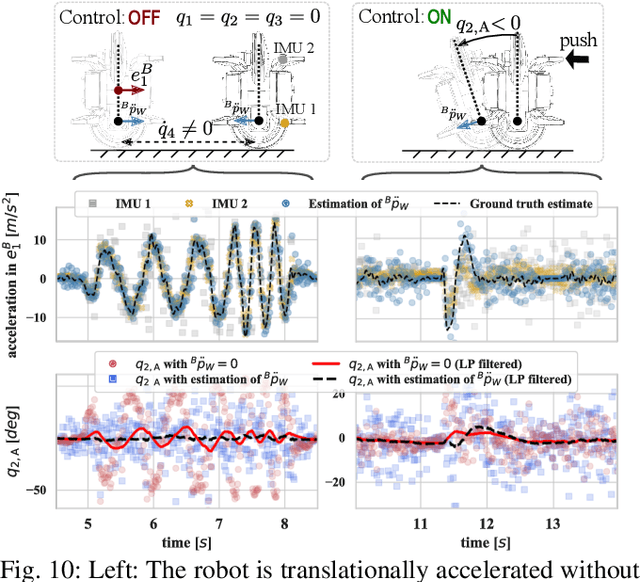
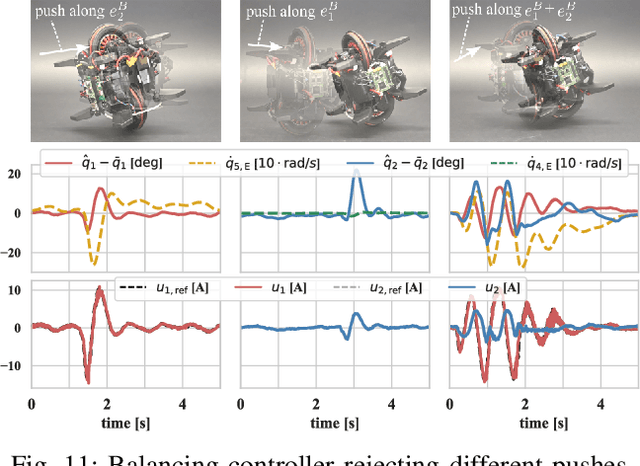

Combining off-the-shelf components with 3Dprinting, the Wheelbot is a symmetric reaction wheel unicycle that can jump onto its wheels from any initial position. With non-holonomic and under-actuated dynamics, as well as two coupled unstable degrees of freedom, the Wheelbot provides a challenging platform for nonlinear and data-driven control research. This paper presents the Wheelbot's mechanical and electrical design, its estimation and control algorithms, as well as experiments demonstrating both self-erection and disturbance rejection while balancing.
An Open Torque-Controlled Modular Robot Architecture for Legged Locomotion Research
Sep 30, 2019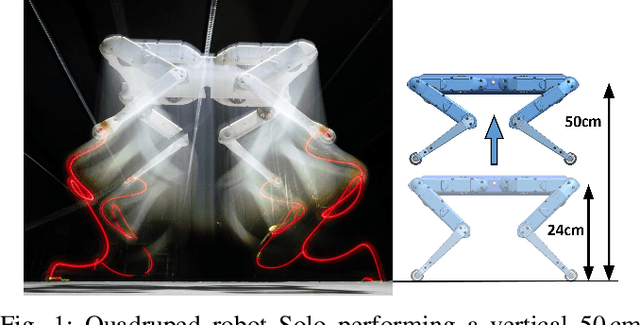
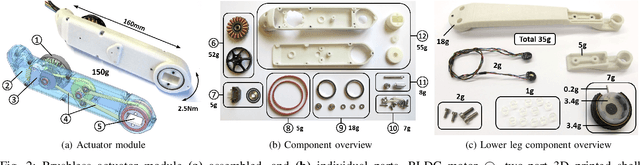
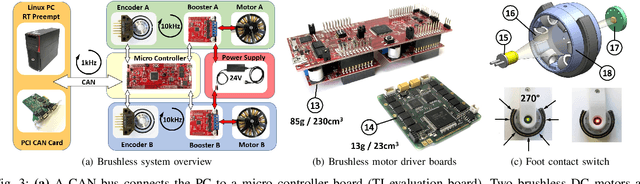
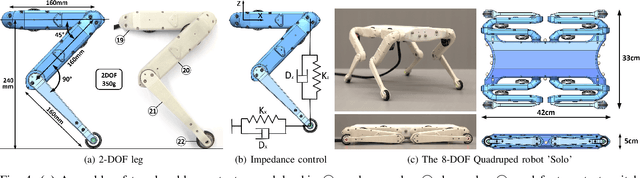
We present a new open-source torque-controlled legged robot system, with a low cost and low complexity actuator module at its core. It consists of a low-weight high torque brushless DC motor and a low gear ratio transmission suitable for impedance and force control. We also present a novel foot contact sensor suitable for legged locomotion with hard impacts. A 2.2 kg quadruped robot with a large range of motion is assembled from 8 identical actuator modules and 4 lower legs with foot contact sensors. To the best of our knowledge, it is the most lightest force-controlled quadruped robot. We leverage standard plastic 3D printing and off-the-shelf parts, resulting in light-weight and inexpensive robots, allowing for rapid distribution and duplication within the research community. In order to quantify the capabilities of our design, we systematically measure the achieved impedance at the foot in static and dynamic scenarios. We measured up to 10.8 dimensionless leg stiffness without active damping, which is comparable to the leg stiffness of a running human. Finally, in order to demonstrate the capabilities of our quadruped robot, we propose a novel controller which combines feedforward contact forces computed from a kino-dynamic optimizer with impedance control of the robot center of mass and base orientation. The controller is capable of regulating complex motions which are robust to environmental uncertainty.