Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Wheelbot: A Jumping Reaction Wheel Unicycle
Jul 14, 2022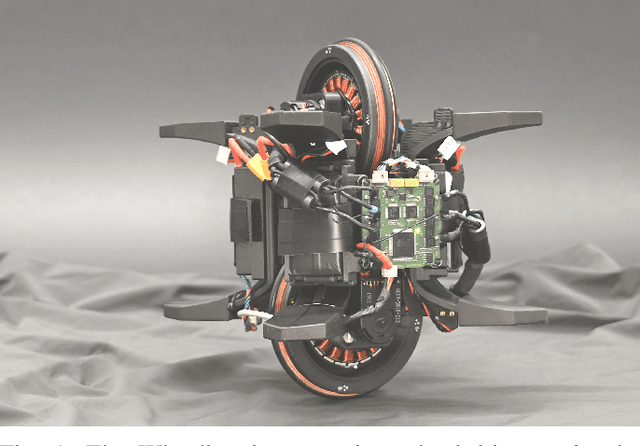

Combining off-the-shelf components with 3Dprinting, the Wheelbot is a symmetric reaction wheel unicycle that can jump onto its wheels from any initial position. With non-holonomic and under-actuated dynamics, as well as two coupled unstable degrees of freedom, the Wheelbot provides a challenging platform for nonlinear and data-driven control research. This paper presents the Wheelbot's mechanical and electrical design, its estimation and control algorithms, as well as experiments demonstrating both self-erection and disturbance rejection while balancing.
* 8 pages, 13 figures, 2 tables, Accepted final version to appear in
IEEE Robotics and Automation Letters
Via