Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Estimation, Control and Coordination of Quadcopter Swarm Robots
Paper and Code
Feb 14, 2021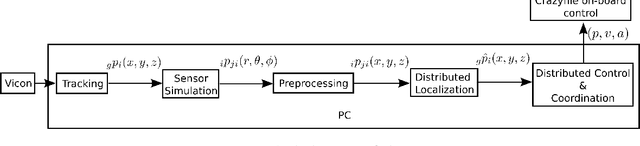
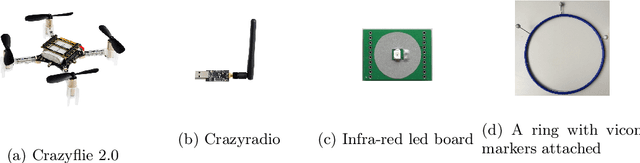
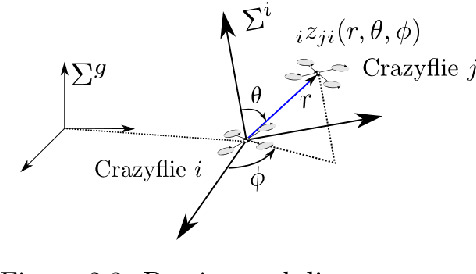
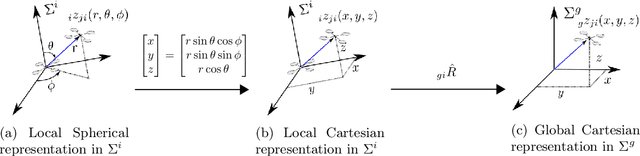
In this thesis we are interested in applying distributed estimation, control and optimization techniques to enable a group of quadcopters to fly through openings. The quadcopters are assumed to be equipped with a simulated bearing and distance sensor for localization. Some quadcopters are designated as leaders who carry global position sensors. We assume quadcopters can communicate information with each other.
View paper on