 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCFD-copilot: leveraging domain-adapted large language model and model context protocol to enhance simulation automation
Dec 08, 2025

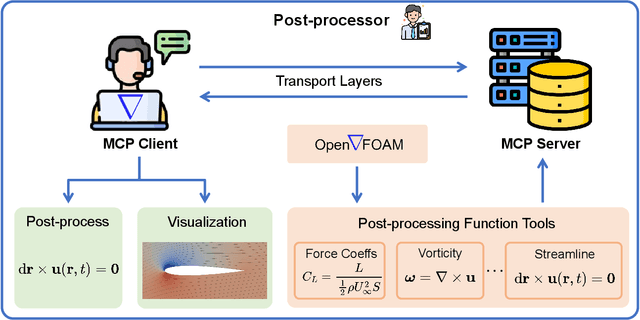

Configuring computational fluid dynamics (CFD) simulations requires significant expertise in physics modeling and numerical methods, posing a barrier to non-specialists. Although automating scientific tasks with large language models (LLMs) has attracted attention, applying them to the complete, end-to-end CFD workflow remains a challenge due to its stringent domain-specific requirements. We introduce CFD-copilot, a domain-specialized LLM framework designed to facilitate natural language-driven CFD simulation from setup to post-processing. The framework employs a fine-tuned LLM to directly translate user descriptions into executable CFD setups. A multi-agent system integrates the LLM with simulation execution, automatic error correction, and result analysis. For post-processing, the framework utilizes the model context protocol (MCP), an open standard that decouples LLM reasoning from external tool execution. This modular design allows the LLM to interact with numerous specialized post-processing functions through a unified and scalable interface, improving the automation of data extraction and analysis. The framework was evaluated on benchmarks including the NACA~0012 airfoil and the three-element 30P-30N airfoil. The results indicate that domain-specific adaptation and the incorporation of the MCP jointly enhance the reliability and efficiency of LLM-driven engineering workflows.
Data-driven quantum Koopman method for simulating nonlinear dynamics
Jul 29, 2025



Quantum computation offers potential exponential speedups for simulating certain physical systems, but its application to nonlinear dynamics is inherently constrained by the requirement of unitary evolution. We propose the quantum Koopman method (QKM), a data-driven framework that bridges this gap through transforming nonlinear dynamics into linear unitary evolution in higher-dimensional observable spaces. Leveraging the Koopman operator theory to achieve a global linearization, our approach maps system states into a hierarchy of Hilbert spaces using a deep autoencoder. Within the linearized embedding spaces, the state representation is decomposed into modulus and phase components, and the evolution is governed by a set of unitary Koopman operators that act exclusively on the phase. These operators are constructed from diagonal Hamiltonians with coefficients learned from data, a structure designed for efficient implementation on quantum hardware. This architecture enables direct multi-step prediction, and the operator's computational complexity scales logarithmically with the observable space dimension. The QKM is validated across diverse nonlinear systems. Its predictions maintain relative errors below 6% for reaction-diffusion systems and shear flows, and capture key statistics in 2D turbulence. This work establishes a practical pathway for quantum-accelerated simulation of nonlinear phenomena, exploring a framework built on the synergy between deep learning for global linearization and quantum algorithms for unitary dynamics evolution.
Fine-tuning a Large Language Model for Automating Computational Fluid Dynamics Simulations
Apr 21, 2025



Configuring computational fluid dynamics (CFD) simulations typically demands extensive domain expertise, limiting broader access. Although large language models (LLMs) have advanced scientific computing, their use in automating CFD workflows is underdeveloped. We introduce a novel approach centered on domain-specific LLM adaptation. By fine-tuning Qwen2.5-7B-Instruct on NL2FOAM, our custom dataset of 28716 natural language-to-OpenFOAM configuration pairs with chain-of-thought (CoT) annotations, we enable direct translation from natural language descriptions to executable CFD setups. A multi-agent framework orchestrates the process, autonomously verifying inputs, generating configurations, running simulations, and correcting errors. Evaluation on a benchmark of 21 diverse flow cases demonstrates state-of-the-art performance, achieving 88.7% solution accuracy and 82.6% first-attempt success rate. This significantly outperforms larger general-purpose models like Qwen2.5-72B-Instruct, DeepSeek-R1, and Llama3.3-70B-Instruct, while also requiring fewer correction iterations and maintaining high computational efficiency. The results highlight the critical role of domain-specific adaptation in deploying LLM assistants for complex engineering workflows. Our code and fine-tuned model have been deposited at https://github.com/YYgroup/AutoCFD.
Fine-tuning an Large Language Model for Automating Computational Fluid Dynamics Simulations
Apr 13, 2025Configuring computational fluid dynamics (CFD) simulations typically demands extensive domain expertise, limiting broader access. Although large language models (LLMs) have advanced scientific computing, their use in automating CFD workflows is underdeveloped. We introduce a novel approach centered on domain-specific LLM adaptation. By fine-tuning Qwen2.5-7B-Instruct on NL2FOAM, our custom dataset of 28716 natural language-to-OpenFOAM configuration pairs with chain-of-thought (CoT) annotations, we enable direct translation from natural language descriptions to executable CFD setups. A multi-agent framework orchestrates the process, autonomously verifying inputs, generating configurations, running simulations, and correcting errors. Evaluation on a benchmark of 21 diverse flow cases demonstrates state-of-the-art performance, achieving 88.7% solution accuracy and 82.6% first-attempt success rate. This significantly outperforms larger general-purpose models like Qwen2.5-72B-Instruct, DeepSeek-R1, and Llama3.3-70B-Instruct, while also requiring fewer correction iterations and maintaining high computational efficiency. The results highlight the critical role of domain-specific adaptation in deploying LLM assistants for complex engineering workflows.
Inverse Materials Design by Large Language Model-Assisted Generative Framework
Feb 25, 2025Deep generative models hold great promise for inverse materials design, yet their efficiency and accuracy remain constrained by data scarcity and model architecture. Here, we introduce AlloyGAN, a closed-loop framework that integrates Large Language Model (LLM)-assisted text mining with Conditional Generative Adversarial Networks (CGANs) to enhance data diversity and improve inverse design. Taking alloy discovery as a case study, AlloyGAN systematically refines material candidates through iterative screening and experimental validation. For metallic glasses, the framework predicts thermodynamic properties with discrepancies of less than 8% from experiments, demonstrating its robustness. By bridging generative AI with domain knowledge and validation workflows, AlloyGAN offers a scalable approach to accelerate the discovery of materials with tailored properties, paving the way for broader applications in materials science.
Generative prediction of flow field based on the diffusion model
Jun 30, 2024



We propose a geometry-to-flow diffusion model that utilizes the input of obstacle shape to predict a flow field past the obstacle. The model is based on a learnable Markov transition kernel to recover the data distribution from the Gaussian distribution. The Markov process is conditioned on the obstacle geometry, estimating the noise to be removed at each step, implemented via a U-Net. A cross-attention mechanism incorporates the geometry as a prompt. We train the geometry-to-flow diffusion model using a dataset of flows past simple obstacles, including the circle, ellipse, rectangle, and triangle. For comparison, the CNN model is trained using the same dataset. Tests are carried out on flows past obstacles with simple and complex geometries, representing interpolation and extrapolation on the geometry condition, respectively. In the test set, challenging scenarios include a cross and characters `PKU'. Generated flow fields show that the geometry-to-flow diffusion model is superior to the CNN model in predicting instantaneous flow fields and handling complex geometries. Quantitative analysis of the model accuracy and divergence in the fields demonstrate the high robustness of the diffusion model, indicating that the diffusion model learns physical laws implicitly.
Discrete States-Based Trajectory Planning for Nonholonomic Robots
Feb 17, 2023



Due to nonholonomic dynamics, the motion planning of nonholonomic robots is always a difficult problem. This letter presents a Discrete States-based Trajectory Planning(DSTP) algorithm for autonomous nonholonomic robots. The proposed algorithm represents the trajectory as x and y positions, orientation angle, longitude velocity and acceleration, angular velocity, and time intervals. More variables make the expression of optimization and constraints simpler, reduce the error caused by too many approximations, and also handle the gear shifting situation. L-BFGS-B is used to deal with the optimization of many variables and box constraints, thus speeding up the problem solving. Various simulation experiments compared with prior works have validated that our algorithm has an order-of-magnitude efficiency advantage and can generate a smoother trajectory with a high speed and low control effort. Besides, real-world experiments are also conducted to verify the feasibility of our algorithm in real scenes. We will release our codes as ros packages.
An Integrated Constrained Gradient Descent (iCGD) Protocol to Correct Scan-Positional Errors for Electron Ptychography with High Accuracy and Precision
Nov 06, 2022



Correcting scan-positional errors is critical in achieving electron ptychography with both high resolution and high precision. This is a demanding and challenging task due to the sheer number of parameters that need to be optimized. For atomic-resolution ptychographic reconstructions, we found classical refining methods for scan positions not satisfactory due to the inherent entanglement between the object and scan positions, which can produce systematic errors in the results. Here, we propose a new protocol consisting of a series of constrained gradient descent (CGD) methods to achieve better recovery of scan positions. The central idea of these CGD methods is to utilize a priori knowledge about the nature of STEM experiments and add necessary constraints to isolate different types of scan positional errors during the iterative reconstruction process. Each constraint will be introduced with the help of simulated 4D-STEM datasets with known positional errors. Then the integrated constrained gradient decent (iCGD) protocol will be demonstrated using an experimental 4D-STEM dataset of the 1H-MoS2 monolayer. We will show that the iCGD protocol can effectively address the errors of scan positions across the spectrum and help to achieve electron ptychography with high accuracy and precision.