 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTRAC: A Textual Benchmark for Reasoning about Actions and Change
Nov 25, 2022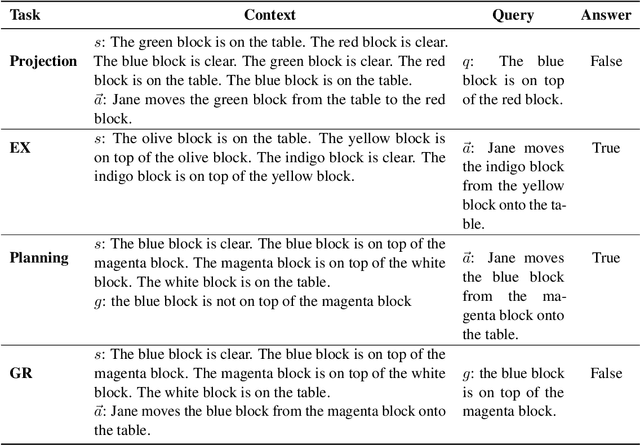
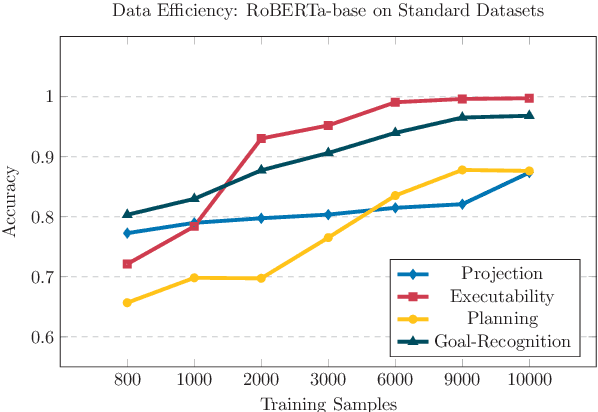
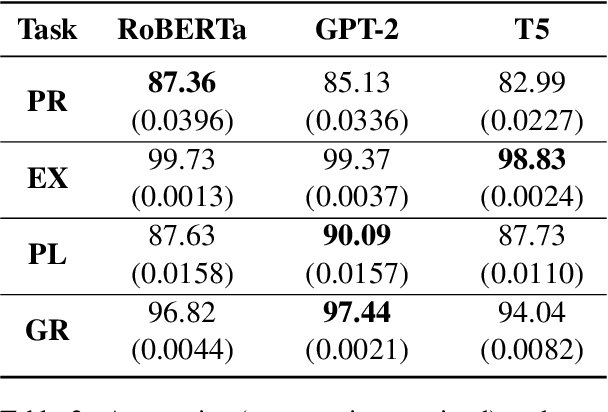
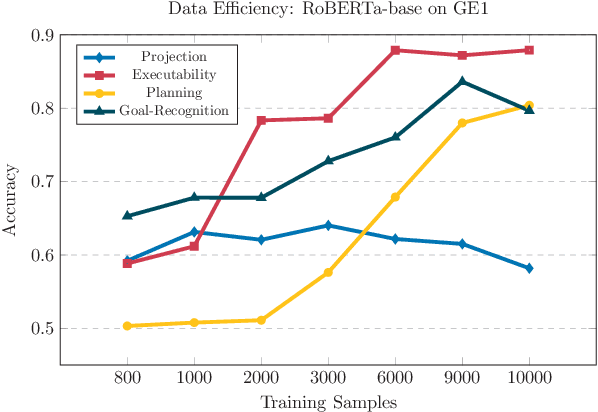
Reasoning about actions and change (RAC) is essential to understand and interact with the ever-changing environment. Previous AI research has shown the importance of fundamental and indispensable knowledge of actions, i.e., preconditions and effects. However, traditional methods rely on logical formalization which hinders practical applications. With recent transformer-based language models (LMs), reasoning over text is desirable and seemingly feasible, leading to the question of whether LMs can effectively and efficiently learn to solve RAC problems. We propose four essential RAC tasks as a comprehensive textual benchmark and generate problems in a way that minimizes the influence of other linguistic requirements (e.g., grounding) to focus on RAC. The resulting benchmark, TRAC, encompassing problems of various complexities, facilitates a more granular evaluation of LMs, precisely targeting the structural generalization ability much needed for RAC. Experiments with three high-performing transformers indicates that additional efforts are needed to tackle challenges raised by TRAC.
Learning Visual Planning Models from Partially Observed Images
Nov 25, 2022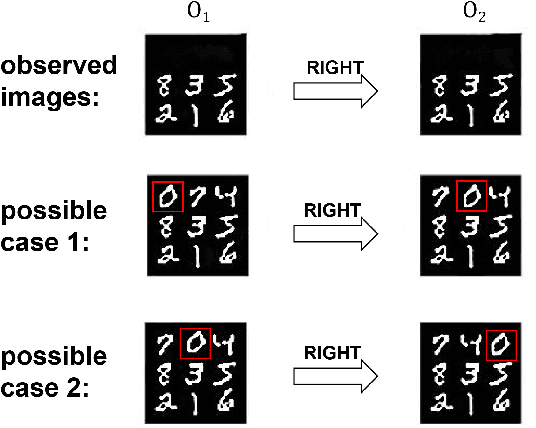

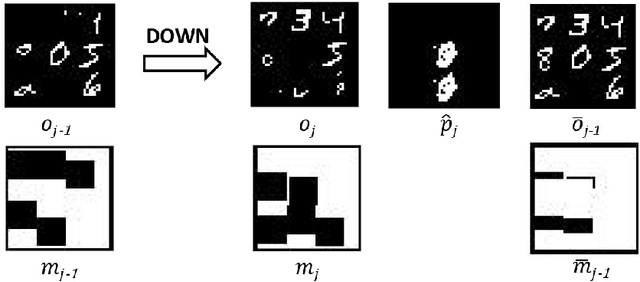

There has been increasing attention on planning model learning in classical planning. Most existing approaches, however, focus on learning planning models from structured data in symbolic representations. It is often difficult to obtain such structured data in real-world scenarios. Although a number of approaches have been developed for learning planning models from fully observed unstructured data (e.g., images), in many scenarios raw observations are often incomplete. In this paper, we provide a novel framework, \aType{Recplan}, for learning a transition model from partially observed raw image traces. More specifically, by considering the preceding and subsequent images in a trace, we learn the latent state representations of raw observations and then build a transition model based on such representations. Additionally, we propose a neural-network-based approach to learn a heuristic model that estimates the distance toward a given goal observation. Based on the learned transition model and heuristic model, we implement a classical planner for images. We exhibit empirically that our approach is more effective than a state-of-the-art approach of learning visual planning models in the environment with incomplete observations.
Gradient-Based Mixed Planning with Discrete and Continuous Actions
Oct 19, 2021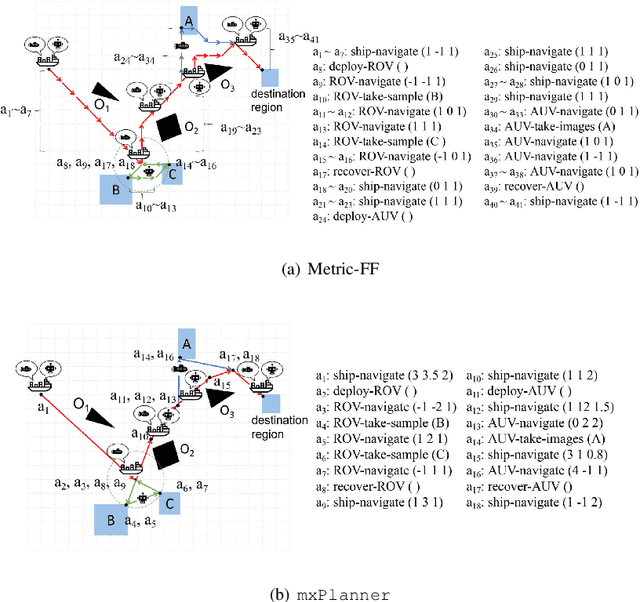
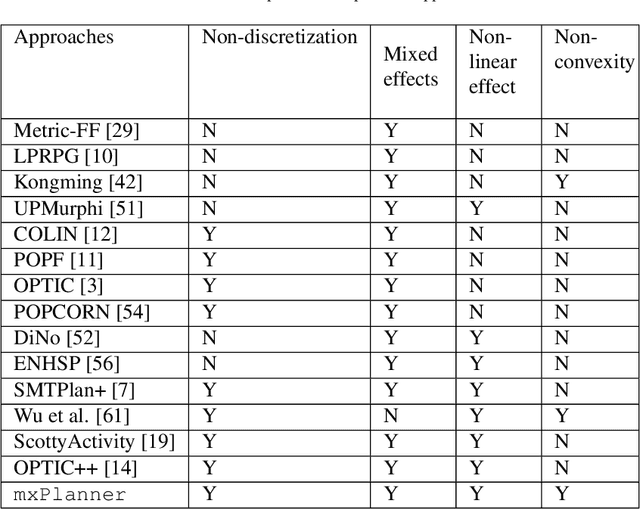
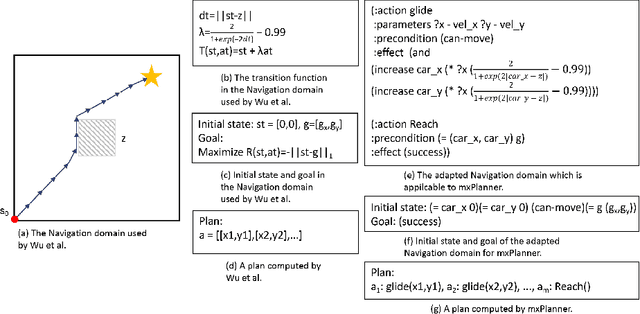
Dealing with planning problems with both discrete logical relations and continuous numeric changes in real-world dynamic environments is challenging. Existing numeric planning systems for the problem often discretize numeric variables or impose convex quadratic constraints on numeric variables, which harms the performance when solving the problem. In this paper, we propose a novel algorithm framework to solve the numeric planning problems mixed with discrete and continuous actions based on gradient descent. We cast the numeric planning with discrete and continuous actions as an optimization problem by integrating a heuristic function based on discrete effects. Specifically, we propose a gradient-based framework to simultaneously optimize continuous parameters and actions of candidate plans. The framework is combined with a heuristic module to estimate the best plan candidate to transit initial state to the goal based on relaxation. We repeatedly update numeric parameters and compute candidate plan until it converges to a valid plan to the planning problem. In the empirical study, we exhibit that our algorithm framework is both effective and efficient, especially when solving non-convex planning problems.
Structural Similarity of Boundary Conditions and an Efficient Local Search Algorithm for Goal Conflict Identification
Feb 23, 2021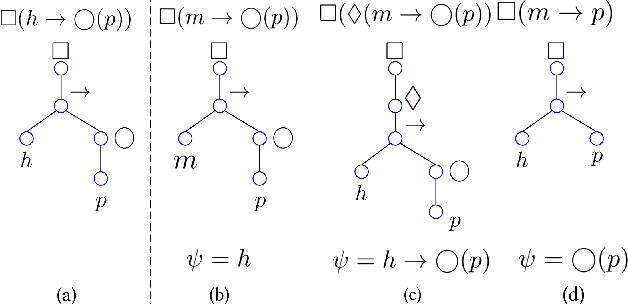
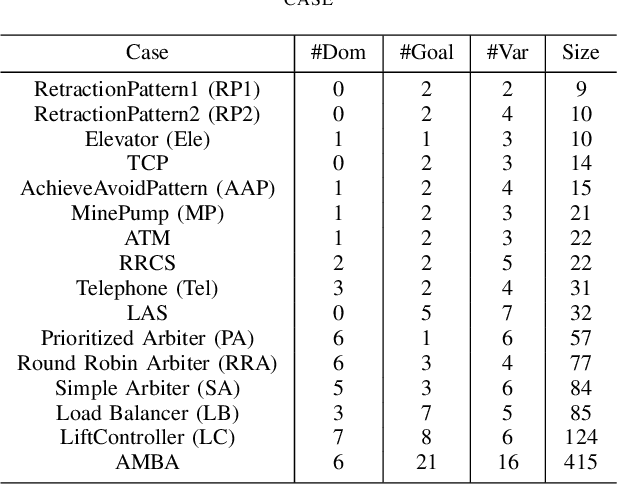
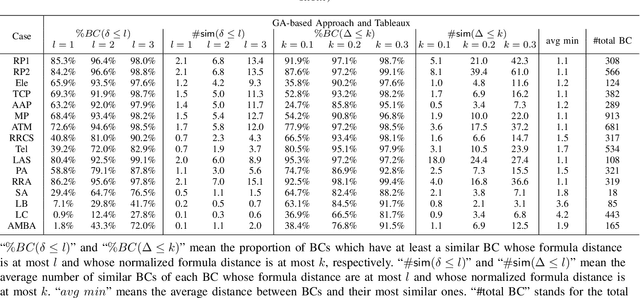
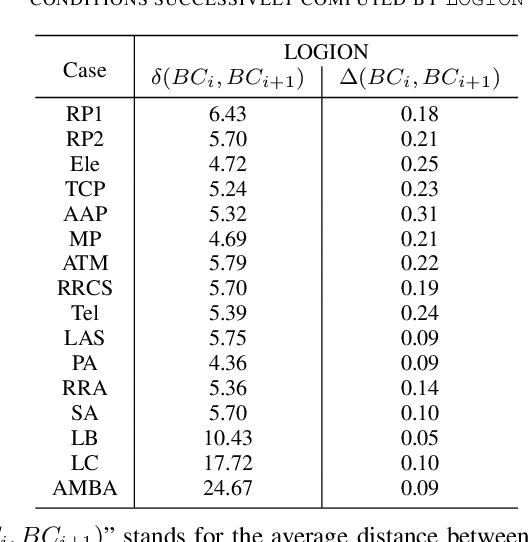
In goal-oriented requirements engineering, goal conflict identification is of fundamental importance for requirements analysis. The task aims to find the feasible situations which make the goals diverge within the domain, called boundary conditions (BCs). However, the existing approaches for goal conflict identification fail to find sufficient BCs and general BCs which cover more combinations of circumstances. From the BCs found by these existing approaches, we have observed an interesting phenomenon that there are some pairs of BCs are similar in formula structure, which occurs frequently in the experimental cases. In other words, once a BC is found, a new BC may be discovered quickly by slightly changing the former. It inspires us to develop a local search algorithm named LOGION to find BCs, in which the structural similarity is captured by the neighborhood relation of formulae. Based on structural similarity, LOGION can find a lot of BCs in a short time. Moreover, due to the large number of BCs identified, it potentially selects more general BCs from them. By taking experiments on a set of cases, we show that LOGION effectively exploits the structural similarity of BCs. We also compare our algorithm against the two state-of-the-art approaches. The experimental results show that LOGION produces one order of magnitude more BCs than the state-of-the-art approaches and confirm that LOGION finds out more general BCs thanks to a large number of BCs.
Refining HTN Methods via Task Insertion with Preferences
Nov 29, 2019


Hierarchical Task Network (HTN) planning is showing its power in real-world planning. Although domain experts have partial hierarchical domain knowledge, it is time-consuming to specify all HTN methods, leaving them incomplete. On the other hand, traditional HTN learning approaches focus only on declarative goals, omitting the hierarchical domain knowledge. In this paper, we propose a novel learning framework to refine HTN methods via task insertion with completely preserving the original methods. As it is difficult to identify incomplete methods without designating declarative goals for compound tasks, we introduce the notion of prioritized preference to capture the incompleteness possibility of methods. Specifically, the framework first computes the preferred completion profile w.r.t. the prioritized preference to refine the incomplete methods. Then it finds the minimal set of refined methods via a method substitution operation. Experimental analysis demonstrates that our approach is effective, especially in solving new HTN planning instances.
Representation Learning for Classical Planning from Partially Observed Traces
Jul 19, 2019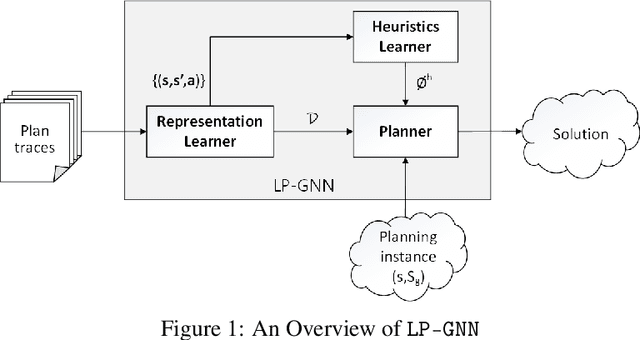
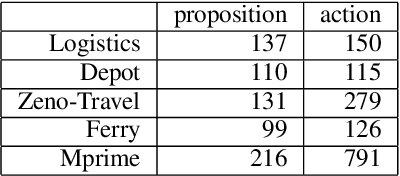
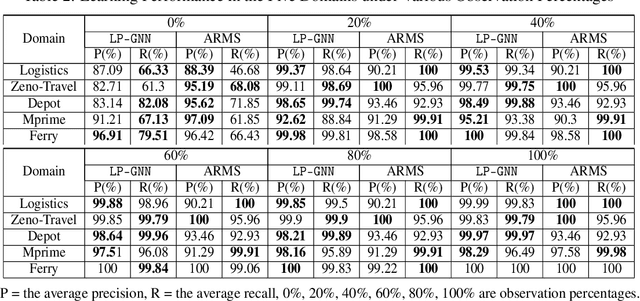
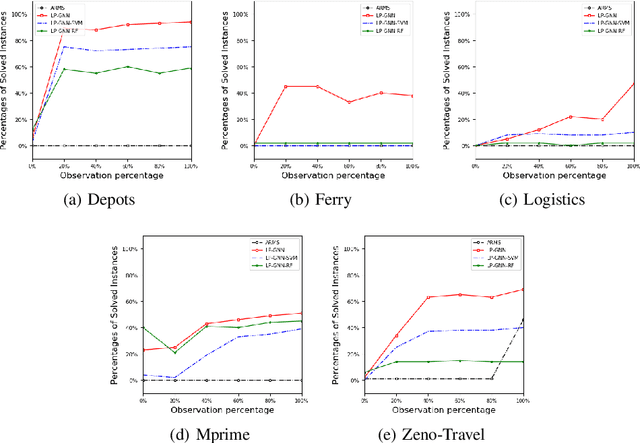
Specifying a complete domain model is time-consuming, which has been a bottleneck of AI planning technique application in many real-world scenarios. Most classical domain-model learning approaches output a domain model in the form of the declarative planning language, such as STRIPS or PDDL, and solve new planning instances by invoking an existing planner. However, planning in such a representation is sensitive to the accuracy of the learned domain model which probably cannot be used to solve real planning problems. In this paper, to represent domain models in a vectorization representation way, we propose a novel framework based on graph neural network (GNN) integrating model-free learning and model-based planning, called LP-GNN. By embedding propositions and actions in a graph, the latent relationship between them is explored to form a domain-specific heuristics. We evaluate our approach on five classical planning domains, comparing with the classical domain-model learner ARMS. The experimental results show that the domain models learned by our approach are much more effective on solving real planning problems.