 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProRAC: A Neuro-symbolic Method for Reasoning about Actions with LLM-based Progression
Nov 19, 2025



In this paper, we propose ProRAC (Progression-based Reasoning about Actions and Change), a neuro-symbolic framework that leverages LLMs to tackle RAC problems. ProRAC extracts fundamental RAC elements including actions and questions from the problem, progressively executes each action to derive the final state, and then evaluates the query against the progressed state to arrive at an answer. We evaluate ProRAC on several RAC benchmarks, and the results demonstrate that our approach achieves strong performance across different benchmarks, domains, LLM backbones, and types of RAC tasks.
Abstraction Method for Generalized Planning with Baggable Types
Jan 25, 2025

Generalized planning is concerned with how to find a single plan to solve multiple similar planning instances. Abstractions are widely used for solving generalized planning, and QNP (qualitative numeric planning) is a popular abstract model. Recently, Cui et al. showed that a plan solves a sound and complete abstraction of a generalized planning problem if and only if the refined plan solves the original problem. However, existing work on automatic abstraction for generalized planning can hardly guarantee soundness let alone completeness. In this paper, we propose an automatic sound and complete abstraction method for generalized planning with baggable types. We use a variant of QNP, called bounded QNP (BQNP), where integer variables are increased or decreased by only one. Since BQNP is undecidable, we propose and implement a sound but incomplete solver for BQNP. We present an automatic method to abstract a BQNP problem from a classical planning instance with baggable types. The basic idea for abstraction is to introduce a counter for each bag of indistinguishable tuples of objects. We define a class of domains called proper baggable domains, and show that for such domains, the BQNP problem got by our automatic method is a sound and complete abstraction for a generalized planning problem whose instances share the same bags with the given instance but the sizes of the bags might be different. Thus, the refined plan of a solution to the BQNP problem is a solution to the generalized planning problem. Finally, we implement our abstraction method and experiments on a number of domains demonstrate the promise of our approach.
TRAC: A Textual Benchmark for Reasoning about Actions and Change
Nov 25, 2022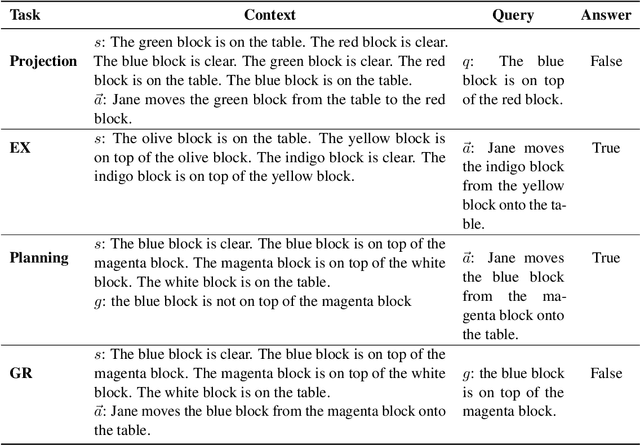
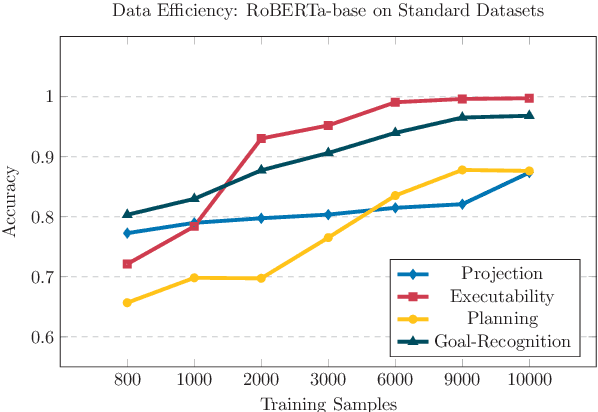
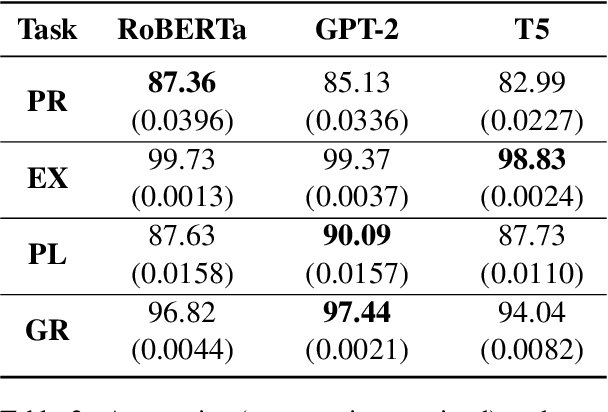
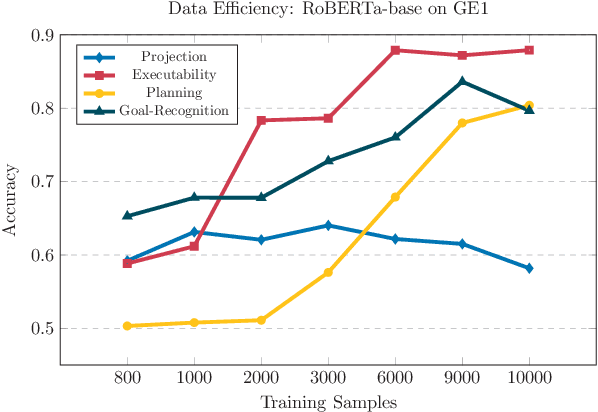
Reasoning about actions and change (RAC) is essential to understand and interact with the ever-changing environment. Previous AI research has shown the importance of fundamental and indispensable knowledge of actions, i.e., preconditions and effects. However, traditional methods rely on logical formalization which hinders practical applications. With recent transformer-based language models (LMs), reasoning over text is desirable and seemingly feasible, leading to the question of whether LMs can effectively and efficiently learn to solve RAC problems. We propose four essential RAC tasks as a comprehensive textual benchmark and generate problems in a way that minimizes the influence of other linguistic requirements (e.g., grounding) to focus on RAC. The resulting benchmark, TRAC, encompassing problems of various complexities, facilitates a more granular evaluation of LMs, precisely targeting the structural generalization ability much needed for RAC. Experiments with three high-performing transformers indicates that additional efforts are needed to tackle challenges raised by TRAC.
Automatic Verification of Sound Abstractions for Generalized Planning
May 24, 2022
Generalized planning studies the computation of general solutions for a set of planning problems. Computing general solutions with correctness guarantee has long been a key issue in generalized planning. Abstractions are widely used to solve generalized planning problems. Solutions of sound abstractions are those with correctness guarantees for generalized planning problems. Recently, Cui et al. proposed a uniform abstraction framework for generalized planning. They gave the model-theoretic definitions of sound and complete abstractions for generalized planning problems. In this paper, based on Cui et al.'s work, we explore automatic verification of sound abstractions for generalized planning. We firstly present the proof-theoretic characterization for sound abstraction. Then, based on the characterization, we give a sufficient condition for sound abstractions which is first-order verifiable. To implement it, we exploit regression extensions, and develop methods to handle counting and transitive closure. Finally, we implement a sound abstraction verification system and report experimental results on several domains.
A General Multi-agent Epistemic Planner Based on Higher-order Belief Change
Aug 14, 2018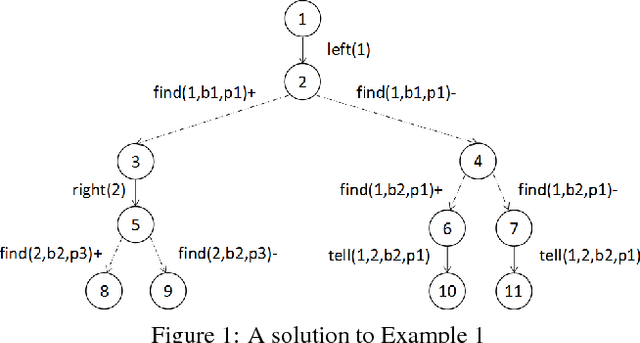
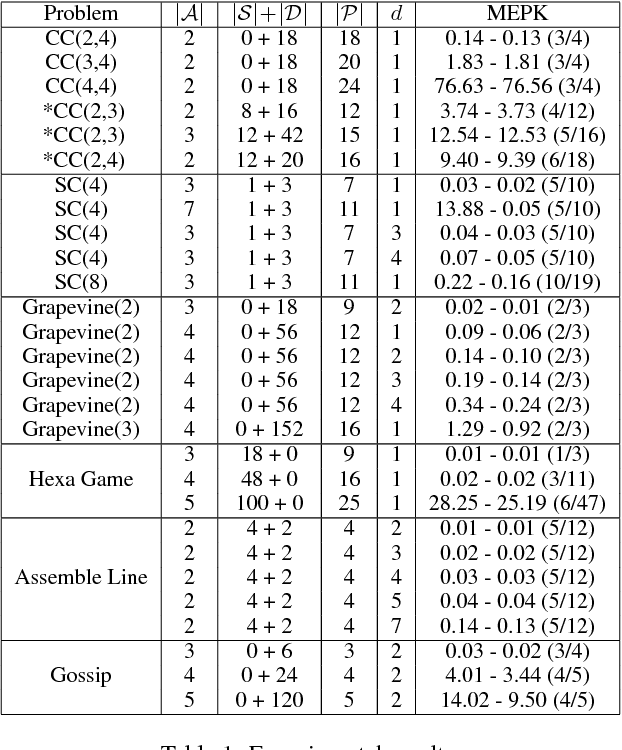
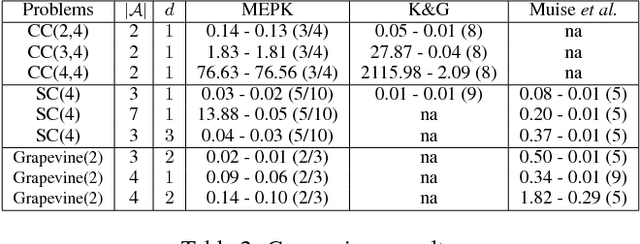
In recent years, multi-agent epistemic planning has received attention from both dynamic logic and planning communities. Existing implementations of multi-agent epistemic planning are based on compilation into classical planning and suffer from various limitations, such as generating only linear plans, restriction to public actions, and incapability to handle disjunctive beliefs. In this paper, we propose a general representation language for multi-agent epistemic planning where the initial KB and the goal, the preconditions and effects of actions can be arbitrary multi-agent epistemic formulas, and the solution is an action tree branching on sensing results. To support efficient reasoning in the multi-agent KD45 logic, we make use of a normal form called alternating cover disjunctive formulas (ACDFs). We propose basic revision and update algorithms for ACDFs. We also handle static propositional common knowledge, which we call constraints. Based on our reasoning, revision and update algorithms, adapting the PrAO algorithm for contingent planning from the literature, we implemented a multi-agent epistemic planner called MEPK. Our experimental results show the viability of our approach.
* One of the authors think it's not appropriate to show this work there days. Then we discussed, we want submit a new work and this one together later