 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrasping by Spiraling: Reproducing Elephant Movements with Rigid-Soft Robot Synergy
Apr 02, 2025The logarithmic spiral is observed as a common pattern in several living beings across kingdoms and species. Some examples include fern shoots, prehensile tails, and soft limbs like octopus arms and elephant trunks. In the latter cases, spiraling is also used for grasping. Motivated by how this strategy simplifies behavior into kinematic primitives and combines them to develop smart grasping movements, this work focuses on the elephant trunk, which is more deeply investigated in the literature. We present a soft arm combined with a rigid robotic system to replicate elephant grasping capabilities based on the combination of a soft trunk with a solid body. In our system, the rigid arm ensures positioning and orientation, mimicking the role of the elephant's head, while the soft manipulator reproduces trunk motion primitives of bending and twisting under proper actuation patterns. This synergy replicates 9 distinct elephant grasping strategies reported in the literature, accommodating objects of varying shapes and sizes. The synergistic interaction between the rigid and soft components of the system minimizes the control complexity while maintaining a high degree of adaptability.
Bioinspired Soft Spiral Robots for Versatile Grasping and Manipulation
Mar 17, 2023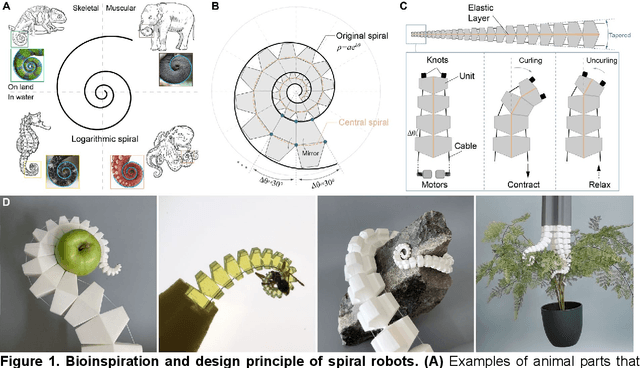
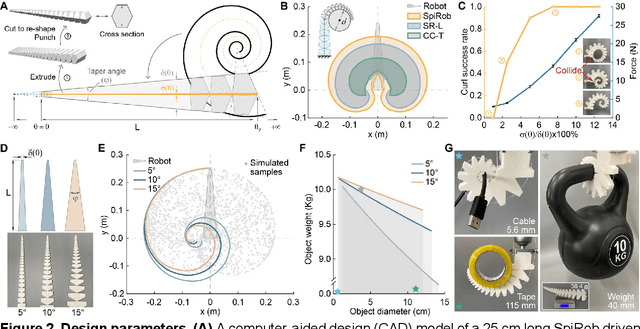
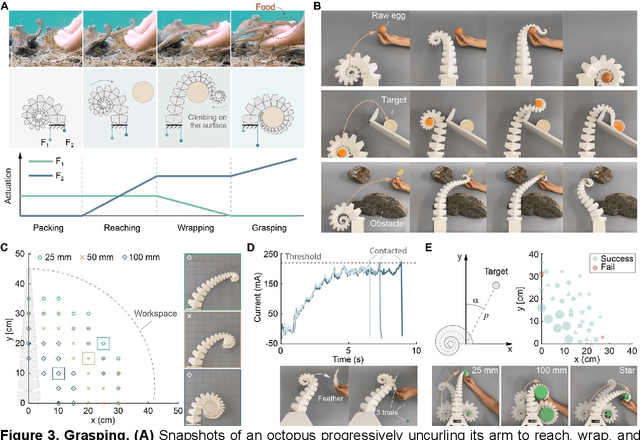
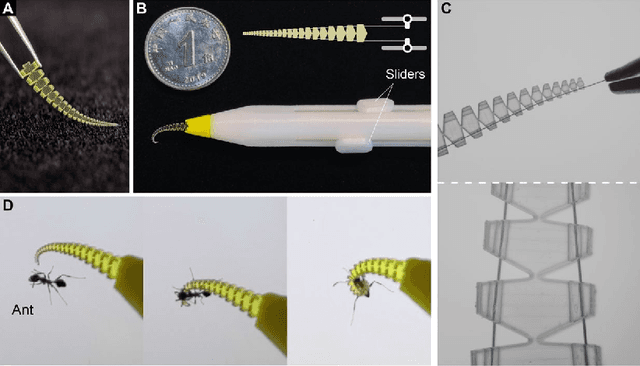
Across various species and different scales, certain organisms use their appendages to grasp objects not through clamping but through wrapping. This pattern of movement is found in octopus tentacles, elephant trunks, and chameleon prehensile tails, demonstrating a great versatility to grasp a wide range of objects of various sizes and weights as well as dynamically manipulate them in the 3D space. We observed that the structures of these appendages follow a common pattern - a logarithmic spiral - which is especially challenging for existing robot designs to reproduce. This paper reports the design, fabrication, and operation of a class of cable-driven soft robots that morphologically replicate spiral-shaped wrapping. This amounts to substantially curling in length while actively controlling the curling direction as enabled by two principles: a) the parametric design based on the logarithmic spiral makes it possible to tightly pack to grasp objects that vary in size by more than two orders of magnitude and up to 260 times self-weight and b) asymmetric cable forces allow the swift control of the curling direction for conducting object manipulation. We demonstrate the ability to dynamically operate objects at a sub-second level by exploiting passive compliance. We believe that our study constitutes a step towards engineered systems that wrap to grasp and manipulate, and further sheds some insights into understanding the efficacy of biological spiral-shaped appendages.
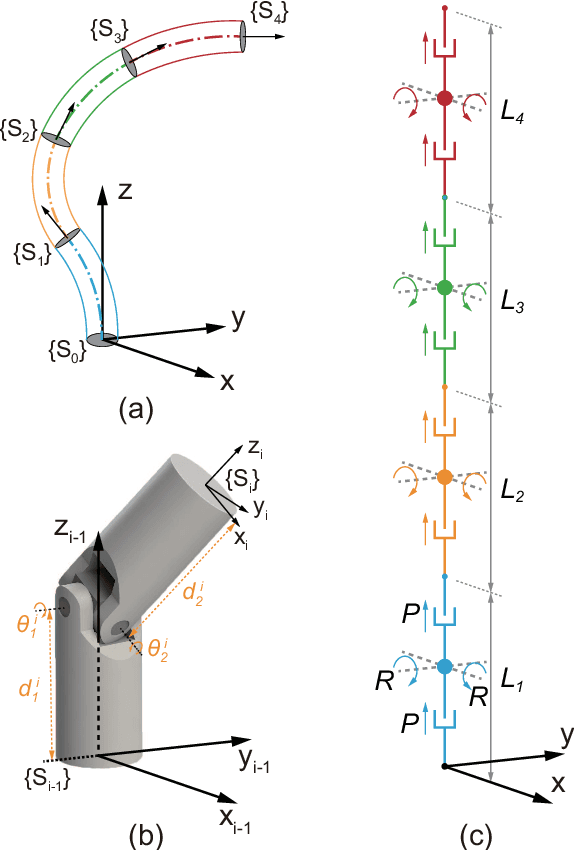
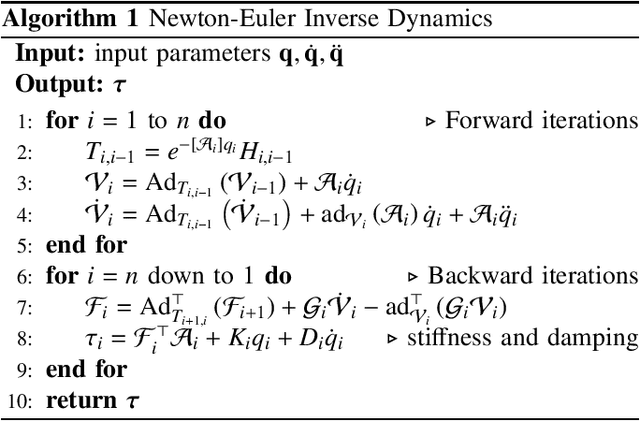
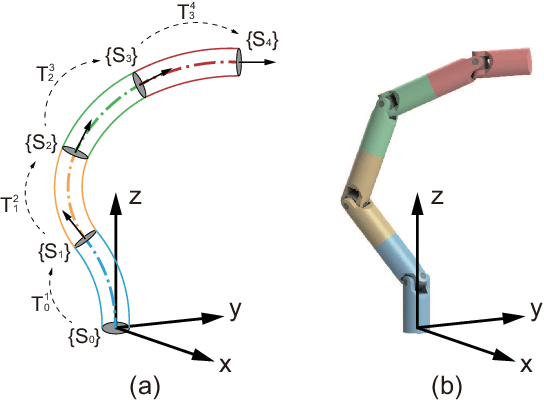
Dynamical Modeling and Control of Soft Robots with Non-constant Curvature Deformation
Mar 19, 2022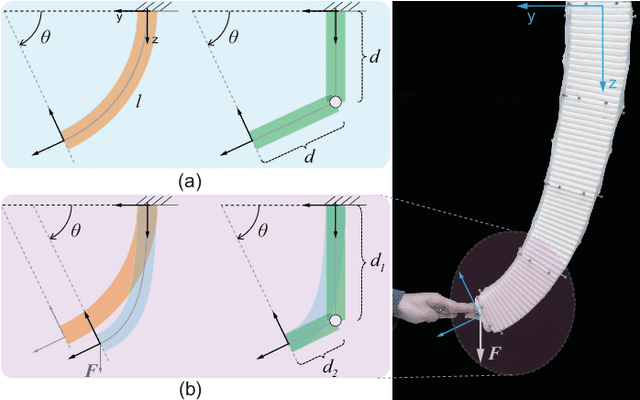
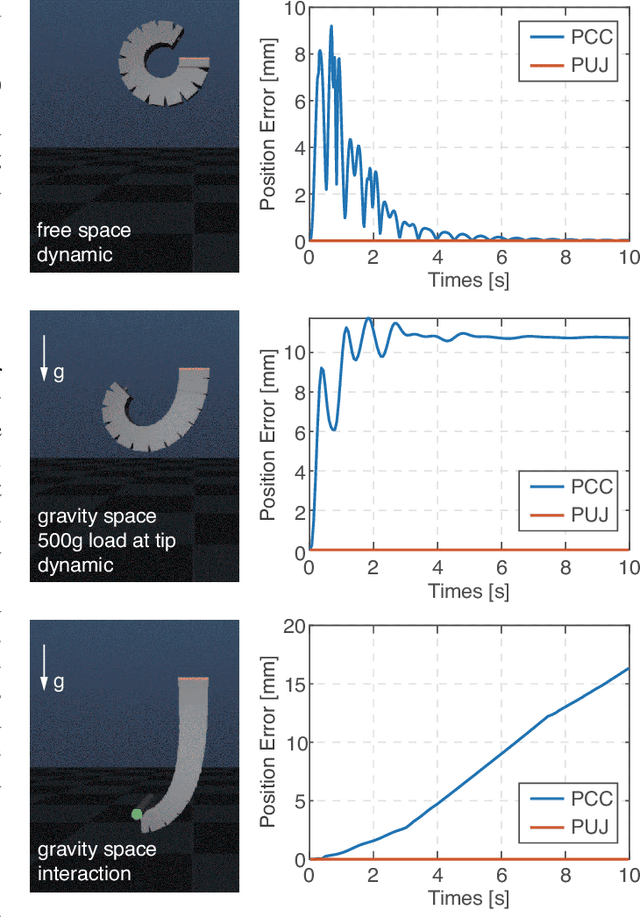
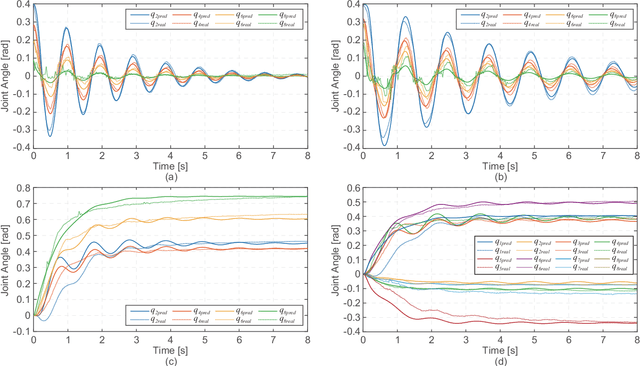
The Piecewise Constant Curvature (PCC) model is the most widely used soft robotic modeling and control. However, the PCC fails to accurately describe the deformation of the soft robots when executing dynamic tasks or interacting with the environment. This paper presents a simple threedimensional (3D) modeling method for a multi-segment soft robotic manipulator with non-constant curvature deformation. We devise kinematic and dynamical models for soft manipulators by modeling each segment of the manipulator as two stretchable links connected by a universal joint. Based on that, we present two controllers for dynamic trajectory tracking in confguration space and pose control in task space, respectively. Model accuracy is demonstrated with simulations and experimental data. The controllers are implemented on a four-segment soft robotic manipulator and validated in dynamic motions and pose control with unknown loads. The experimental results show that the dynamic controller enables a stable reference trajectory tracking at speeds up to 7m/s.
Control of a Soft Robotic Arm Using a Piecewise Universal Joint Model
Jan 05, 2022

The 'infinite' passive degrees of freedom of soft robotic arms render their control especially challenging. In this paper, we leverage a previously developed model, which drawing equivalence of the soft arm to a series of universal joints, to design two closed-loop controllers: a configuration space controller for trajectory tracking and a task space controller for position control of the end effector. Extensive experiments and simulations on a four-segment soft arm attest to substantial improvement in terms of: a) superior tracking accuracy of the configuration space controller and b) reduced settling time and steady-state error of the task space controller. The task space controller is also verified to be effective in the presence of interactions between the soft arm and the environment.
Unified Kinematic and Dynamical Modeling of a Soft Robotic Arm by a Piecewise Universal Joint Model
Sep 14, 2021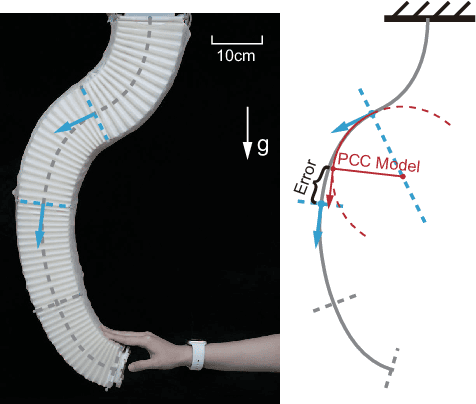
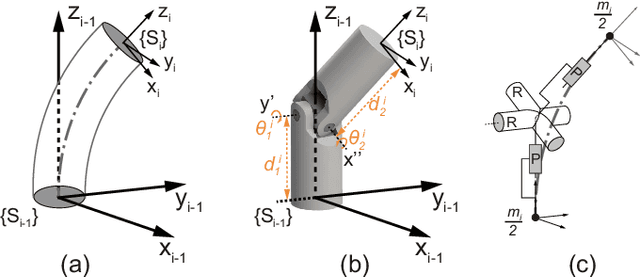
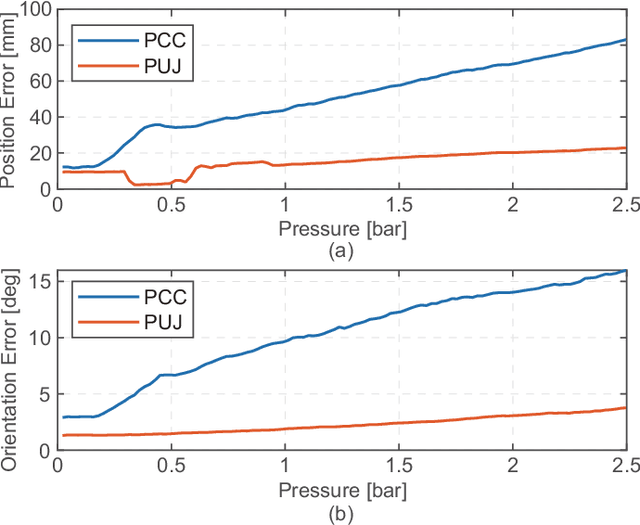
The compliance of soft robotic arms renders the development of accurate kinematic & dynamical models especially challenging. The most widely used model in soft robotic kinematics assumes Piecewise Constant Curvature (PCC). However, PCC fails to effectively handle external forces, or even the influence of gravity, since the robot does not deform with a constant curvature under these conditions. In this paper, we establish three-dimensional (3D) modeling of a multi-segment soft robotic arm under the less restrictive assumption that each segment of the arm is deformed on a plane without twisting. We devise a kinematic and dynamical model for the soft arm by deriving equivalence to a serial universal joint robot. Numerous experiments on the real robot platform along with simulations attest to the modeling accuracy of our approach in 3D motion with load. The maximum position/rotation error of the proposed model is verified 6.7x/4.6x lower than the PCC model considering gravity and external forces.
Design, Control, and Applications of a Soft Robotic Arm
Jul 08, 2020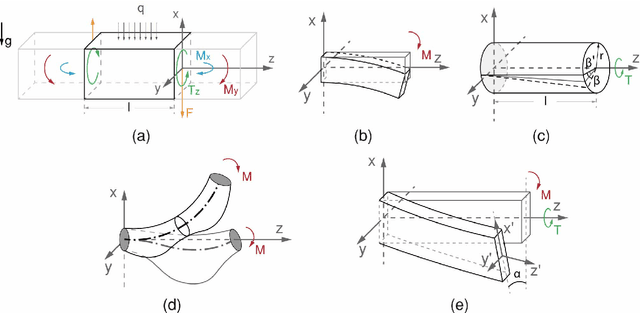
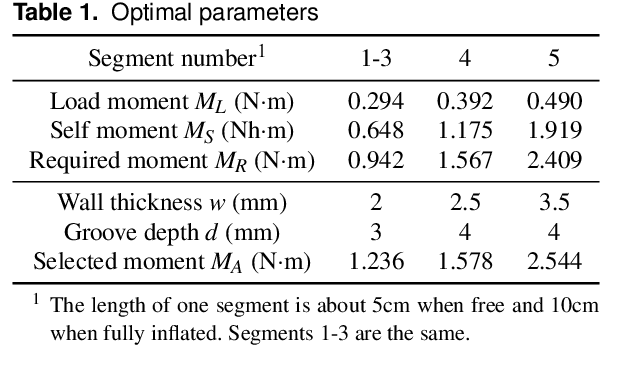
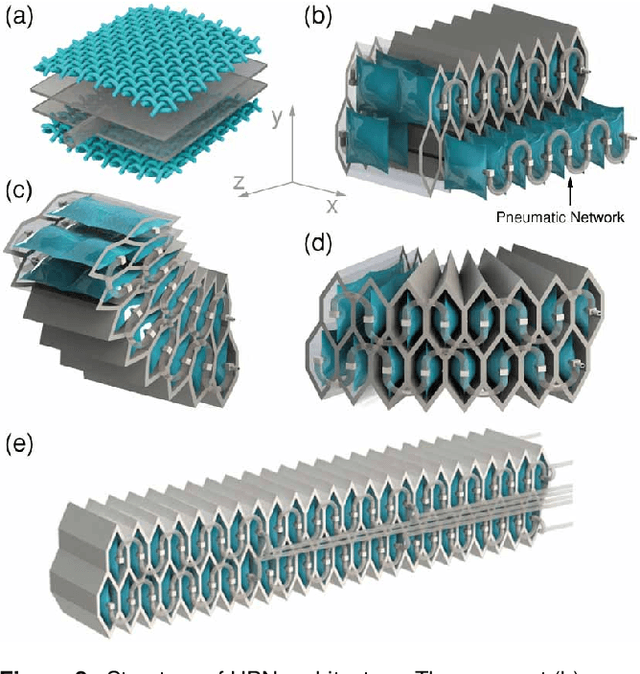
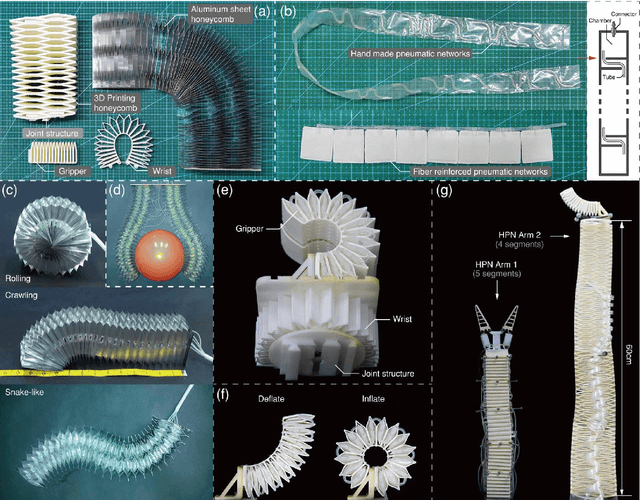
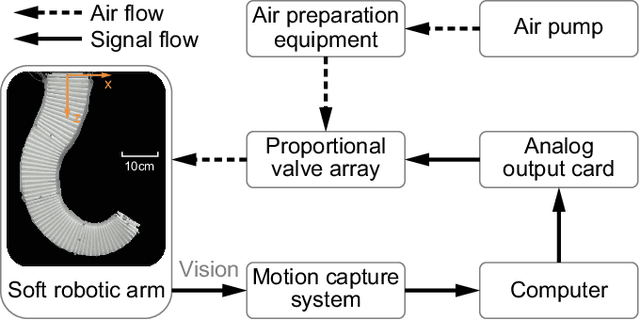
This paper presents the design, control, and applications of a multi-segment soft robotic arm. In order to design a soft arm with large load capacity, several design principles are proposed by analyzing two kinds of buckling issues, under which we present a novel structure named Honeycomb Pneumatic Networks (HPN). Parameter optimization method, based on finite element method (FEM), is proposed to optimize HPN Arm design parameters. Through a quick fabrication process, several prototypes with different performance are made, one of which can achieve the transverse load capacity of 3 kg under 3 bar pressure. Next, considering different internal and external conditions, we develop three controllers according to different model precision. Specifically, based on accurate model, an open-loop controller is realized by combining piece-wise constant curvature (PCC) modeling method and machine learning method. Based on inaccurate model, a feedback controller, using estimated Jacobian, is realized in 3D space. A model-free controller, using reinforcement learning to learn a control policy rather than a model, is realized in 2D plane, with minimal training data. Then, these three control methods are compared on a same experiment platform to explore the applicability of different methods under different conditions. Lastly, we figure out that soft arm can greatly simplify the perception, planning, and control of interaction tasks through its compliance, which is its main advantage over the rigid arm. Through plentiful experiments in three interaction application scenarios, human-robot interaction, free space interaction task, and confined space interaction task, we demonstrate the potential application prospect of the soft arm.