 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl of a Soft Robotic Arm Using a Piecewise Universal Joint Model
Paper and Code
Jan 05, 2022
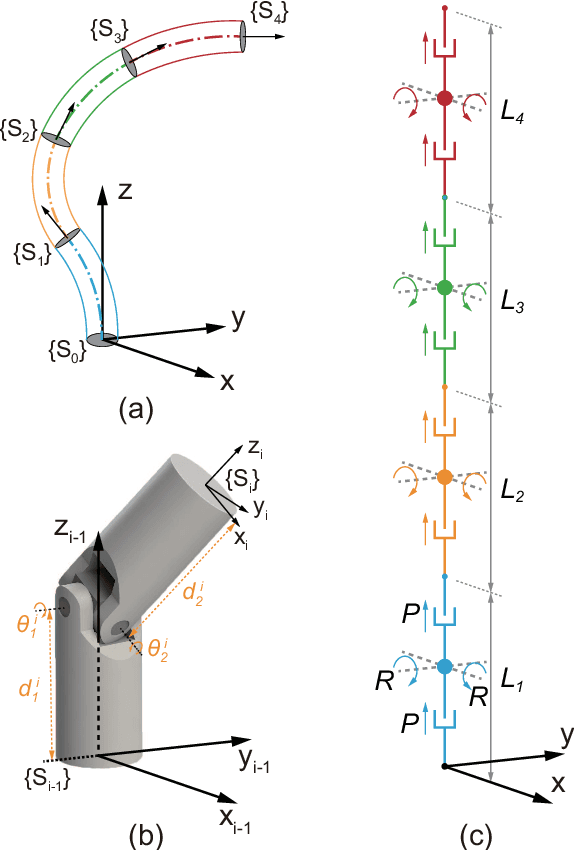

The 'infinite' passive degrees of freedom of soft robotic arms render their control especially challenging. In this paper, we leverage a previously developed model, which drawing equivalence of the soft arm to a series of universal joints, to design two closed-loop controllers: a configuration space controller for trajectory tracking and a task space controller for position control of the end effector. Extensive experiments and simulations on a four-segment soft arm attest to substantial improvement in terms of: a) superior tracking accuracy of the configuration space controller and b) reduced settling time and steady-state error of the task space controller. The task space controller is also verified to be effective in the presence of interactions between the soft arm and the environment.