 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWD-DETR: Wavelet Denoising-Enhanced Real-Time Object Detection Transformer for Robot Perception with Event Cameras
Jun 10, 2025Previous studies on event camera sensing have demonstrated certain detection performance using dense event representations. However, the accumulated noise in such dense representations has received insufficient attention, which degrades the representation quality and increases the likelihood of missed detections. To address this challenge, we propose the Wavelet Denoising-enhanced DEtection TRansformer, i.e., WD-DETR network, for event cameras. In particular, a dense event representation is presented first, which enables real-time reconstruction of events as tensors. Then, a wavelet transform method is designed to filter noise in the event representations. Such a method is integrated into the backbone for feature extraction. The extracted features are subsequently fed into a transformer-based network for object prediction. To further reduce inference time, we incorporate the Dynamic Reorganization Convolution Block (DRCB) as a fusion module within the hybrid encoder. The proposed method has been evaluated on three event-based object detection datasets, i.e., DSEC, Gen1, and 1Mpx. The results demonstrate that WD-DETR outperforms tested state-of-the-art methods. Additionally, we implement our approach on a common onboard computer for robots, the NVIDIA Jetson Orin NX, achieving a high frame rate of approximately 35 FPS using TensorRT FP16, which is exceptionally well-suited for real-time perception of onboard robotic systems.
A Cooperative Aerial System of A Payload Drone Equipped with Dexterous Rappelling End Droid for Cluttered Space Pickup
May 26, 2025In cluttered spaces, such as forests, drone picking up a payload via an abseil claw is an open challenge, as the cable is likely tangled and blocked by the branches and obstacles. To address such a challenge, in this work, a cooperative aerial system is proposed, which consists of a payload drone and a dexterous rappelling end droid. The two ends are linked via a Kevlar tether cable. The end droid is actuated by four propellers, which enable mid-air dexterous adjustment of clawing angle and guidance of cable movement. To avoid tanglement and rappelling obstacles, a trajectory optimization method that integrates cable length constraints and dynamic feasibility is developed, which guarantees safe pickup. A tether cable dynamic model is established to evaluate real-time cable status, considering both taut and sagging conditions. Simulation and real-world experiments are conducted to demonstrate that the proposed system is capable of picking up payload in cluttered spaces. As a result, the end droid can reach the target point successfully under cable constraints and achieve passive retrieval during the lifting phase without propulsion, which enables effective and efficient aerial manipulation.
An Efficient Trajectory Generation for Bi-copter Flight in Tight Space
Jun 02, 2024



Unlike squared (or alike) quadrotors, elongated bi-copters leverage natural superiority in crossing tight spaces. To date, extensive works have focused on the design, modeling, and control of bi-copters. Besides, a proper motion planner utilizing bi-copters' shape characteristics is essential to efficiently and safely traverse tight spaces, yet it has rarely been studied. Current motion planning methods will significantly compromise their ability to traverse narrow spaces if the map is inflated based on the long dimension of the bi-copter. In this paper, we propose an efficient motion planning method that enables the safe navigation of bi-copters through narrow spaces. We first adapt a dynamic, feasible path-finding algorithm with whole-body collision checks to generate a collision-free path. Subsequently, we jointly optimize the position and rotation of the bi-copter to produce a trajectory that is safe, dynamically feasible, and smooth. Extensive simulations and real-world experiments have been conducted to verify the reliability and robustness of the proposed method.
Bio-Inspired Adversarial Attack Against Deep Neural Networks
Jun 30, 2021

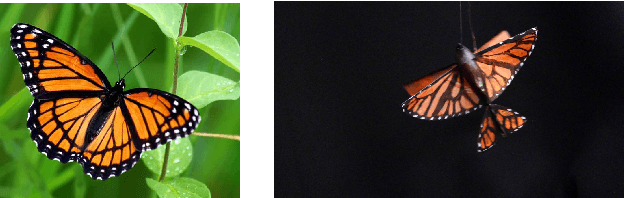
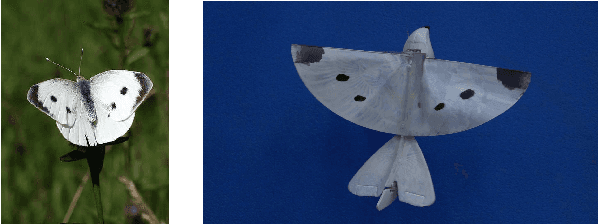
The paper develops a new adversarial attack against deep neural networks (DNN), based on applying bio-inspired design to moving physical objects. To the best of our knowledge, this is the first work to introduce physical attacks with a moving object. Instead of following the dominating attack strategy in the existing literature, i.e., to introduce minor perturbations to a digital input or a stationary physical object, we show two new successful attack strategies in this paper. We show by superimposing several patterns onto one physical object, a DNN becomes confused and picks one of the patterns to assign a class label. Our experiment with three flapping wing robots demonstrates the possibility of developing an adversarial camouflage to cause a targeted mistake by DNN. We also show certain motion can reduce the dependency among consecutive frames in a video and make an object detector "blind", i.e., not able to detect an object exists in the video. Hence in a successful physical attack against DNN, targeted motion against the system should also be considered.
* Published in SafeAI 2020
Acting Is Seeing: Navigating Tight Space Using Flapping Wings
Mar 01, 2019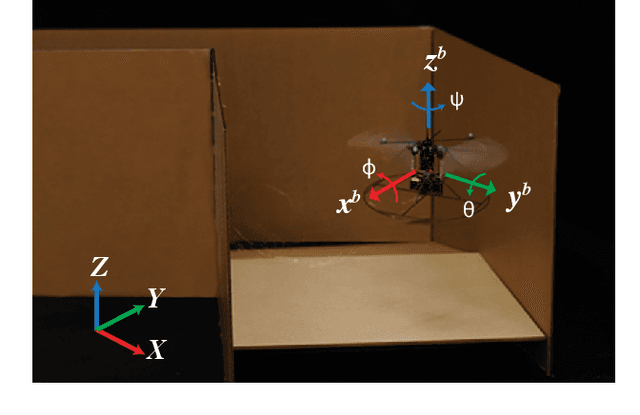
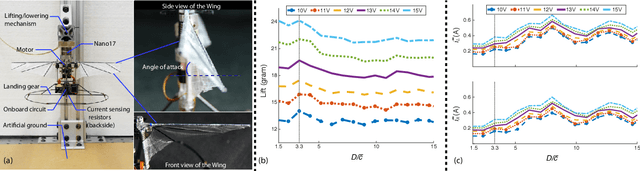
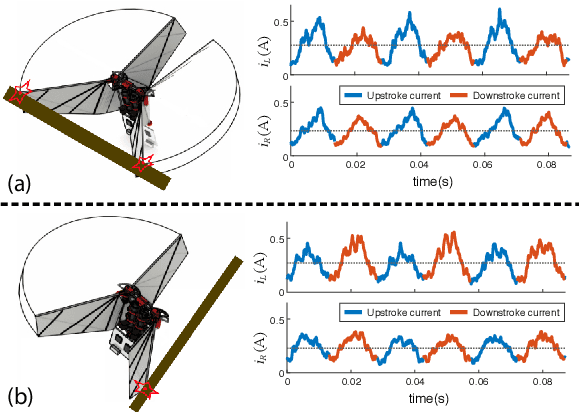
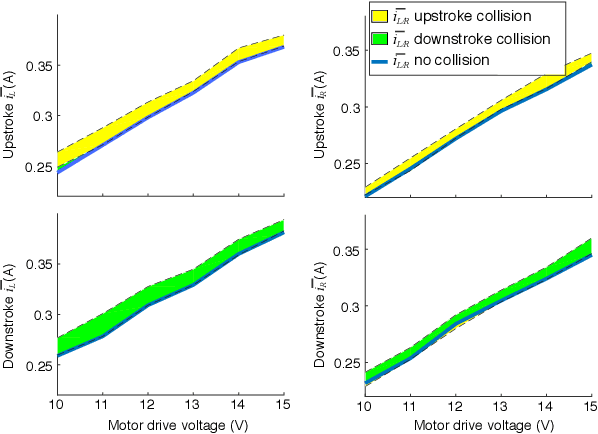
Wings of flying animals can not only generate lift and control torques but also can sense their surroundings. Such dual functions of sensing and actuation coupled in one element are particularly useful for small sized bio-inspired robotic flyers, whose weight, size, and power are under stringent constraint. In this work, we present the first flapping-wing robot using its flapping wings for environmental perception and navigation in tight space, without the need for any visual feedback. As the test platform, we introduce the Purdue Hummingbird, a flapping-wing robot with 17cm wingspan and 12 grams weight, with a pair of 30-40Hz flapping wings driven by only two actuators. By interpreting the wing loading feedback and its variations, the vehicle can detect the presence of environmental changes such as grounds, walls, stairs, obstacles and wind gust. The instantaneous wing loading can be obtained through the measurements and interpretation of the current feedback by the motors that actuate the wings. The effectiveness of the proposed approach is experimentally demonstrated on several challenging flight tasks without vision: terrain following, wall following and going through a narrow corridor. To ensure flight stability, a robust controller was designed for handling unforeseen disturbances during the flight. Sensing and navigating one's environment through actuator loading is a promising method for mobile robots, and it can serve as an alternative or complementary method to visual perception.
Flappy Hummingbird: An Open Source Dynamic Simulation of Flapping Wing Robots and Animals
Feb 25, 2019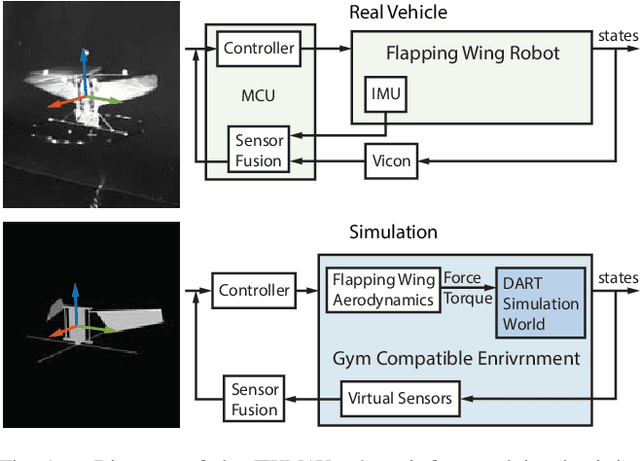
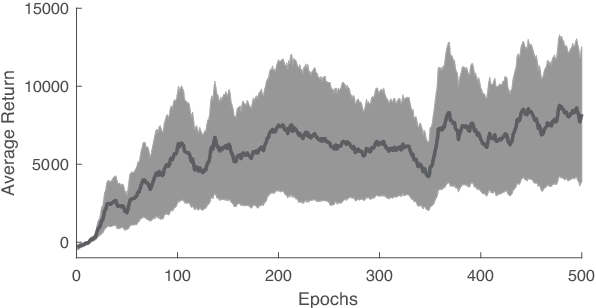
Insects and hummingbirds exhibit extraordinary flight capabilities and can simultaneously master seemingly conflicting goals: stable hovering and aggressive maneuvering, unmatched by small scale man-made vehicles. Flapping Wing Micro Air Vehicles (FWMAVs) hold great promise for closing this performance gap. However, design and control of such systems remain challenging due to various constraints. Here, we present an open source high fidelity dynamic simulation for FWMAVs to serve as a testbed for the design, optimization and flight control of FWMAVs. For simulation validation, we recreated the hummingbird-scale robot developed in our lab in the simulation. System identification was performed to obtain the model parameters. The force generation, open-loop and closed-loop dynamic response between simulated and experimental flights were compared and validated. The unsteady aerodynamics and the highly nonlinear flight dynamics present challenging control problems for conventional and learning control algorithms such as Reinforcement Learning. The interface of the simulation is fully compatible with OpenAI Gym environment. As a benchmark study, we present a linear controller for hovering stabilization and a Deep Reinforcement Learning control policy for goal-directed maneuvering. Finally, we demonstrate direct simulation-to-real transfer of both control policies onto the physical robot, further demonstrating the fidelity of the simulation.
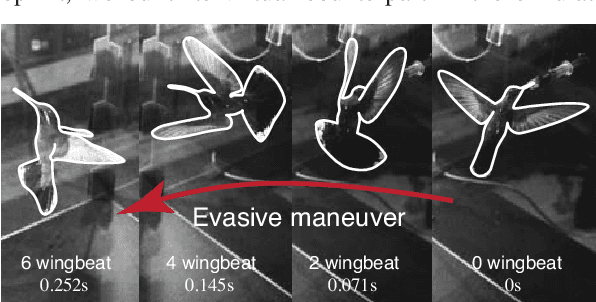
Learning Extreme Hummingbird Maneuvers on Flapping Wing Robots
Feb 25, 2019

Biological studies show that hummingbirds can perform extreme aerobatic maneuvers during fast escape. Given a sudden looming visual stimulus at hover, a hummingbird initiates a fast backward translation coupled with a 180-degree yaw turn, which is followed by instant posture stabilization in just under 10 wingbeats. Consider the wingbeat frequency of 40Hz, this aggressive maneuver is carried out in just 0.2 seconds. Inspired by the hummingbirds' near-maximal performance during such extreme maneuvers, we developed a flight control strategy and experimentally demonstrated that such maneuverability can be achieved by an at-scale 12-gram hummingbird robot equipped with just two actuators. The proposed hybrid control policy combines model-based nonlinear control with model-free reinforcement learning. We use model-based nonlinear control for nominal flight control, as the dynamic model is relatively accurate for these conditions. However, during extreme maneuver, the modeling error becomes unmanageable. A model-free reinforcement learning policy trained in simulation was optimized to 'destabilize' the system and maximize the performance during maneuvering. The hybrid policy manifests a maneuver that is close to that observed in hummingbirds. Direct simulation-to-real transfer is achieved, demonstrating the hummingbird-like fast evasive maneuvers on the at-scale hummingbird robot.
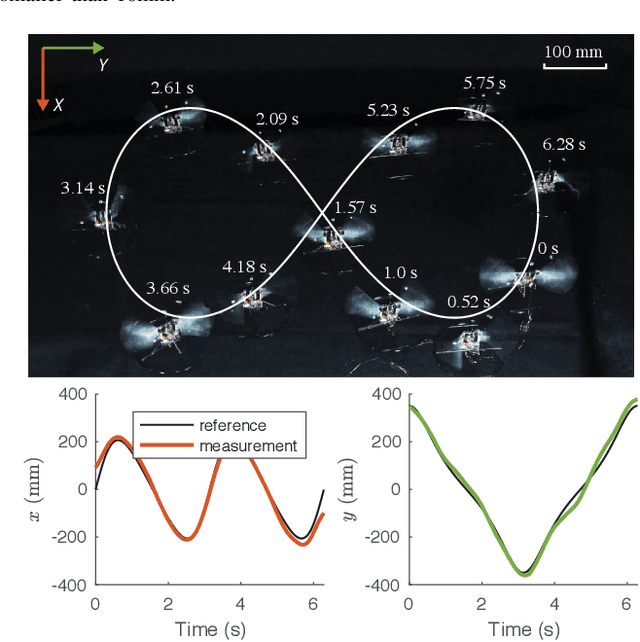
Redundancy-Free UAV Sensor Fault Isolation And Recovery
Nov 30, 2018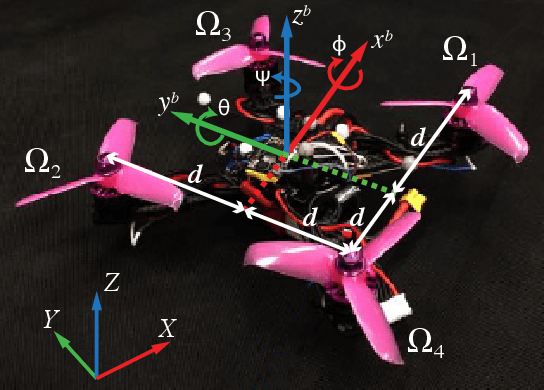
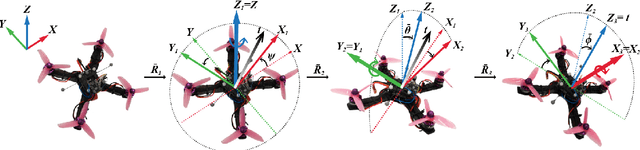
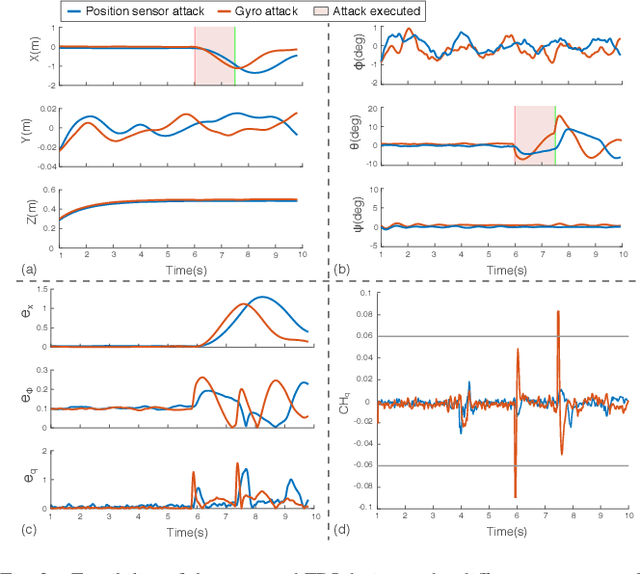
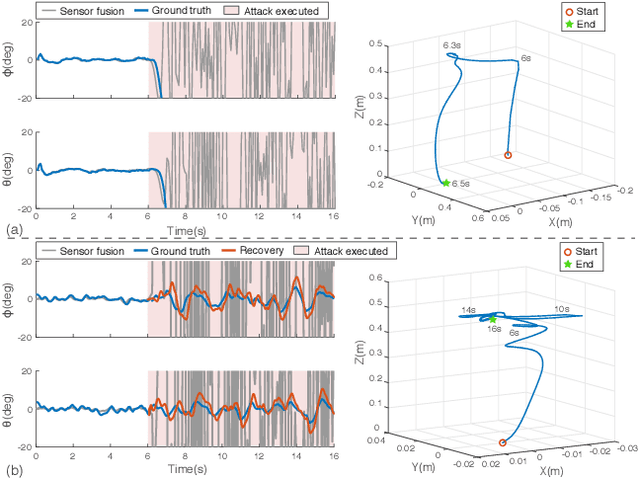
The sensory system of unmanned aerial vehicles (UAVs) plays an important role in flight safety. Thus, any sensor fault/failure can have potentially catastrophic effects on vehicle control. The recent advance in adversarial studies demonstrated successful sensing fault generation by targeting the physical vulnerabilities of the sensors. It poses new security challenges for sensor fault detection and isolation (FDI) and fault recovery (FR) research because the conventional redundancy-based fault-tolerant design is not effective against such faults. To address these challenges, we present a redundancy-free method for UAV sensor FDI and FR. In the FDI design, we used a basic state estimator for a rough early warning of faults. We then refine the design by considering the unmeasurable actuator state and modeling uncertainties. Under such novel strategies, the proposed method achieves fine-grained fault isolation. Based on this method, we further designed a redundancy-free FR method by using complementary sensor estimations. In particular, position and attitude feedback can provide backup feedback for each other through geometric correlation. The effectiveness of our approach is validated through simulation of several challenging sensor failure scenarios. The recovery performance is experimentally demonstrated by a challenging flight tasks-restoring control after completely losing attitude sensory feedback. With the protection of FDI and FR, flight safety is ensured. This UAV security enhancement method is promising to be generalized for other types of vehicles and can serve as a compensation to other fault-tolerant methodologies.