 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey on Solving and Discovering Differential Equations Using Deep Neural Networks
Apr 26, 2023



Ordinary and partial differential equations (DE) are used extensively in scientific and mathematical domains to model physical systems. Current literature has focused primarily on deep neural network (DNN) based methods for solving a specific DE or a family of DEs. Research communities with a history of using DE models may view DNN-based differential equation solvers (DNN-DEs) as a faster and transferable alternative to current numerical methods. However, there is a lack of systematic surveys detailing the use of DNN-DE methods across physical application domains and a generalized taxonomy to guide future research. This paper surveys and classifies previous works and provides an educational tutorial for senior practitioners, professionals, and graduate students in engineering and computer science. First, we propose a taxonomy to navigate domains of DE systems studied under the umbrella of DNN-DE. Second, we examine the theory and performance of the Physics Informed Neural Network (PINN) to demonstrate how the influential DNN-DE architecture mathematically solves a system of equations. Third, to reinforce the key ideas of solving and discovery of DEs using DNN, we provide a tutorial using DeepXDE, a Python package for developing PINNs, to develop DNN-DEs for solving and discovering a classic DE, the linear transport equation.
Eco-PiNN: A Physics-informed Neural Network for Eco-toll Estimation
Jan 19, 2023



The eco-toll estimation problem quantifies the expected environmental cost (e.g., energy consumption, exhaust emissions) for a vehicle to travel along a path. This problem is important for societal applications such as eco-routing, which aims to find paths with the lowest exhaust emissions or energy need. The challenges of this problem are three-fold: (1) the dependence of a vehicle's eco-toll on its physical parameters; (2) the lack of access to data with eco-toll information; and (3) the influence of contextual information (i.e. the connections of adjacent segments in the path) on the eco-toll of road segments. Prior work on eco-toll estimation has mostly relied on pure data-driven approaches and has high estimation errors given the limited training data. To address these limitations, we propose a novel Eco-toll estimation Physics-informed Neural Network framework (Eco-PiNN) using three novel ideas, namely, (1) a physics-informed decoder that integrates the physical laws of the vehicle engine into the network, (2) an attention-based contextual information encoder, and (3) a physics-informed regularization to reduce overfitting. Experiments on real-world heavy-duty truck data show that the proposed method can greatly improve the accuracy of eco-toll estimation compared with state-of-the-art methods.
Redundancy-Free UAV Sensor Fault Isolation And Recovery
Nov 30, 2018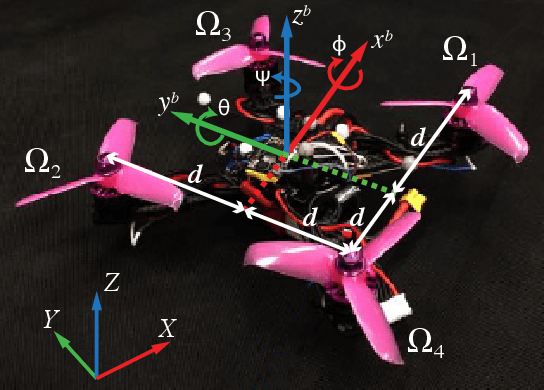
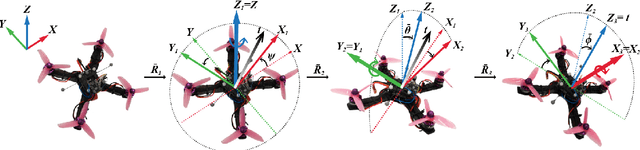
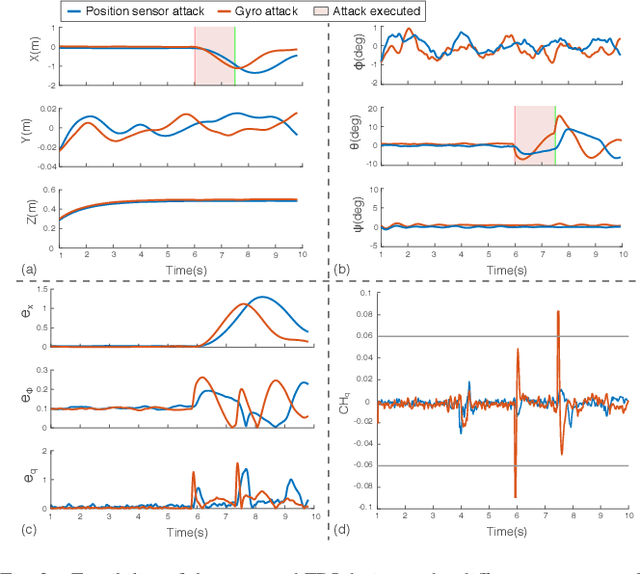
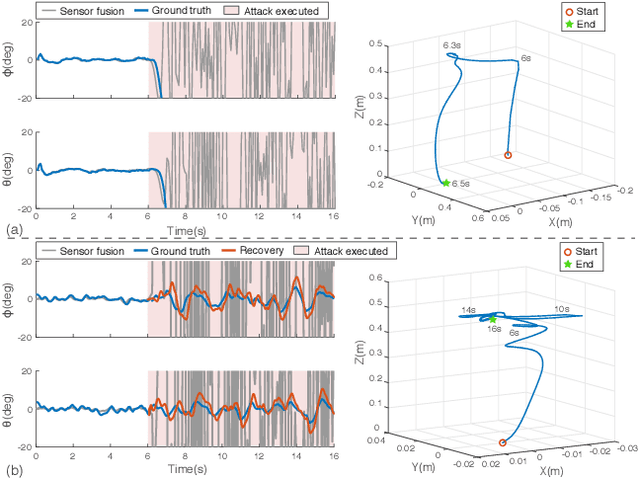
The sensory system of unmanned aerial vehicles (UAVs) plays an important role in flight safety. Thus, any sensor fault/failure can have potentially catastrophic effects on vehicle control. The recent advance in adversarial studies demonstrated successful sensing fault generation by targeting the physical vulnerabilities of the sensors. It poses new security challenges for sensor fault detection and isolation (FDI) and fault recovery (FR) research because the conventional redundancy-based fault-tolerant design is not effective against such faults. To address these challenges, we present a redundancy-free method for UAV sensor FDI and FR. In the FDI design, we used a basic state estimator for a rough early warning of faults. We then refine the design by considering the unmeasurable actuator state and modeling uncertainties. Under such novel strategies, the proposed method achieves fine-grained fault isolation. Based on this method, we further designed a redundancy-free FR method by using complementary sensor estimations. In particular, position and attitude feedback can provide backup feedback for each other through geometric correlation. The effectiveness of our approach is validated through simulation of several challenging sensor failure scenarios. The recovery performance is experimentally demonstrated by a challenging flight tasks-restoring control after completely losing attitude sensory feedback. With the protection of FDI and FR, flight safety is ensured. This UAV security enhancement method is promising to be generalized for other types of vehicles and can serve as a compensation to other fault-tolerant methodologies.