 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRedundancy-Free UAV Sensor Fault Isolation And Recovery
Paper and Code
Nov 30, 2018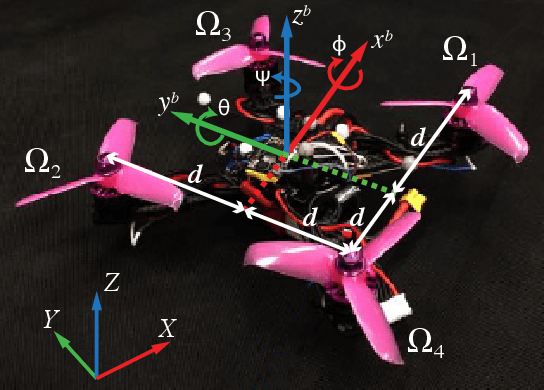
The sensory system of unmanned aerial vehicles (UAVs) plays an important role in flight safety. Thus, any sensor fault/failure can have potentially catastrophic effects on vehicle control. The recent advance in adversarial studies demonstrated successful sensing fault generation by targeting the physical vulnerabilities of the sensors. It poses new security challenges for sensor fault detection and isolation (FDI) and fault recovery (FR) research because the conventional redundancy-based fault-tolerant design is not effective against such faults. To address these challenges, we present a redundancy-free method for UAV sensor FDI and FR. In the FDI design, we used a basic state estimator for a rough early warning of faults. We then refine the design by considering the unmeasurable actuator state and modeling uncertainties. Under such novel strategies, the proposed method achieves fine-grained fault isolation. Based on this method, we further designed a redundancy-free FR method by using complementary sensor estimations. In particular, position and attitude feedback can provide backup feedback for each other through geometric correlation. The effectiveness of our approach is validated through simulation of several challenging sensor failure scenarios. The recovery performance is experimentally demonstrated by a challenging flight tasks-restoring control after completely losing attitude sensory feedback. With the protection of FDI and FR, flight safety is ensured. This UAV security enhancement method is promising to be generalized for other types of vehicles and can serve as a compensation to other fault-tolerant methodologies.