 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Physics-informed Diffusion for Anomaly Detection in Trajectories
Jun 08, 2025Given trajectory data, a domain-specific study area, and a user-defined threshold, we aim to find anomalous trajectories indicative of possible GPS spoofing (e.g., fake trajectory). The problem is societally important to curb illegal activities in international waters, such as unauthorized fishing and illicit oil transfers. The problem is challenging due to advances in AI generated in deep fakes generation (e.g., additive noise, fake trajectories) and lack of adequate amount of labeled samples for ground-truth verification. Recent literature shows promising results for anomalous trajectory detection using generative models despite data sparsity. However, they do not consider fine-scale spatiotemporal dependencies and prior physical knowledge, resulting in higher false-positive rates. To address these limitations, we propose a physics-informed diffusion model that integrates kinematic constraints to identify trajectories that do not adhere to physical laws. Experimental results on real-world datasets in the maritime and urban domains show that the proposed framework results in higher prediction accuracy and lower estimation error rate for anomaly detection and trajectory generation methods, respectively. Our implementation is available at https://github.com/arunshar/Physics-Informed-Diffusion-Probabilistic-Model.
Spatial Distribution-Shift Aware Knowledge-Guided Machine Learning
Feb 20, 2025



Given inputs of diverse soil characteristics and climate data gathered from various regions, we aimed to build a model to predict accurate land emissions. The problem is important since accurate quantification of the carbon cycle in agroecosystems is crucial for mitigating climate change and ensuring sustainable food production. Predicting accurate land emissions is challenging since calibrating the heterogeneous nature of soil properties, moisture, and environmental conditions is hard at decision-relevant scales. Traditional approaches do not adequately estimate land emissions due to location-independent parameters failing to leverage the spatial heterogeneity and also require large datasets. To overcome these limitations, we proposed Spatial Distribution-Shift Aware Knowledge-Guided Machine Learning (SDSA-KGML), which leverages location-dependent parameters that account for significant spatial heterogeneity in soil moisture from multiple sites within the same region. Experimental results demonstrate that SDSA-KGML models achieve higher local accuracy for the specified states in the Midwest Region.
Towards Physics-Guided Foundation Models
Feb 20, 2025

Traditional foundation models are pre-trained on broad datasets to reduce the training resources (e.g., time, energy, labeled samples) needed for fine-tuning a wide range of downstream tasks. However, traditional foundation models struggle with out-of-distribution prediction and can produce outputs that are unrealistic and physically infeasible. We propose the notation of physics-guided foundation models (PGFM), that is, foundation models integrated with broad or general domain (e.g., scientific) physical knowledge applicable to a wide range of downstream tasks.
Spatially-Delineated Domain-Adapted AI Classification: An Application for Oncology Data
Jan 20, 2025



Given multi-type point maps from different place-types (e.g., tumor regions), our objective is to develop a classifier trained on the source place-type to accurately distinguish between two classes of the target place-type based on their point arrangements. This problem is societally important for many applications, such as generating clinical hypotheses for designing new immunotherapies for cancer treatment. The challenge lies in the spatial variability, the inherent heterogeneity and variation observed in spatial properties or arrangements across different locations (i.e., place-types). Previous techniques focus on self-supervised tasks to learn domain-invariant features and mitigate domain differences; however, they often neglect the underlying spatial arrangements among data points, leading to significant discrepancies across different place-types. We explore a novel multi-task self-learning framework that targets spatial arrangements, such as spatial mix-up masking and spatial contrastive predictive coding, for spatially-delineated domain-adapted AI classification. Experimental results on real-world datasets (e.g., oncology data) show that the proposed framework provides higher prediction accuracy than baseline methods.
Towards Spatially-Lucid AI Classification in Non-Euclidean Space: An Application for MxIF Oncology Data
Feb 22, 2024Given multi-category point sets from different place-types, our goal is to develop a spatially-lucid classifier that can distinguish between two classes based on the arrangements of their points. This problem is important for many applications, such as oncology, for analyzing immune-tumor relationships and designing new immunotherapies. It is challenging due to spatial variability and interpretability needs. Previously proposed techniques require dense training data or have limited ability to handle significant spatial variability within a single place-type. Most importantly, these deep neural network (DNN) approaches are not designed to work in non-Euclidean space, particularly point sets. Existing non-Euclidean DNN methods are limited to one-size-fits-all approaches. We explore a spatial ensemble framework that explicitly uses different training strategies, including weighted-distance learning rate and spatial domain adaptation, on various place-types for spatially-lucid classification. Experimental results on real-world datasets (e.g., MxIF oncology data) show that the proposed framework provides higher prediction accuracy than baseline methods.
Eco-PiNN: A Physics-informed Neural Network for Eco-toll Estimation
Jan 19, 2023



The eco-toll estimation problem quantifies the expected environmental cost (e.g., energy consumption, exhaust emissions) for a vehicle to travel along a path. This problem is important for societal applications such as eco-routing, which aims to find paths with the lowest exhaust emissions or energy need. The challenges of this problem are three-fold: (1) the dependence of a vehicle's eco-toll on its physical parameters; (2) the lack of access to data with eco-toll information; and (3) the influence of contextual information (i.e. the connections of adjacent segments in the path) on the eco-toll of road segments. Prior work on eco-toll estimation has mostly relied on pure data-driven approaches and has high estimation errors given the limited training data. To address these limitations, we propose a novel Eco-toll estimation Physics-informed Neural Network framework (Eco-PiNN) using three novel ideas, namely, (1) a physics-informed decoder that integrates the physical laws of the vehicle engine into the network, (2) an attention-based contextual information encoder, and (3) a physics-informed regularization to reduce overfitting. Experiments on real-world heavy-duty truck data show that the proposed method can greatly improve the accuracy of eco-toll estimation compared with state-of-the-art methods.
MC-DGCNN: A Novel DNN Architecture for Multi-Category Point Set Classification
Dec 22, 2021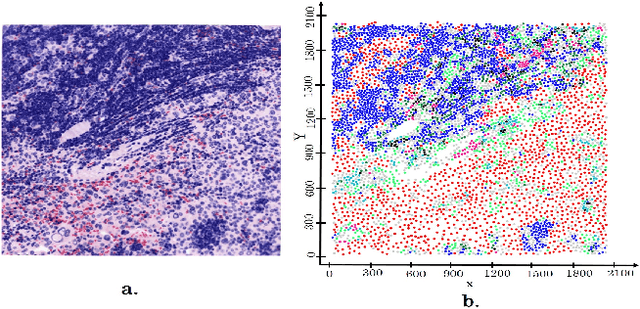

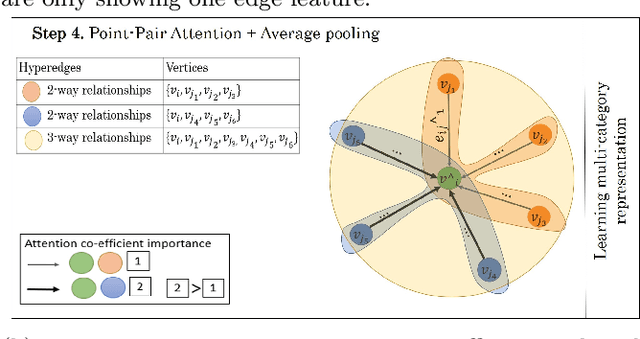
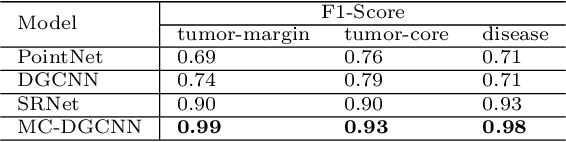
Point set classification aims to build a representation learning model that distinguishes between spatial and categorical configurations of point set data. This problem is societally important since in many applications domains such as immunology, and microbial ecology. This problem is challenging since the interactions between different categories of points are not always equal; as a result, the representation learning model must selectively learn the most relevant multi-categorical relationships. The related works are limited (1) in learning the importance of different multi-categorical relationships, especially for high-order interactions, and (2) do not fully exploit the spatial distribution of points beyond simply measuring relative distance or applying a feed-forward neural network to coordinates. To overcome these limitations, we leverage the dynamic graph convolutional neural network (DGCNN) architecture to design a novel multi-category DGCNN (MC-DGCNN), contributing location representation and point pair attention layers for multi-categorical point set classification. MC-DGCNN has the ability to identify the categorical importance of each point pair and extends this to N-way spatial relationships, while still preserving all the properties and benefits of DGCNN (e.g., differentiability). Experimental results show that the proposed architecture is computationally efficient and significantly outperforms current deep learning architectures on real-world datasets.