 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnabling Visual Recognition at Radio Frequency
May 29, 2024



This paper introduces PanoRadar, a novel RF imaging system that brings RF resolution close to that of LiDAR, while providing resilience against conditions challenging for optical signals. Our LiDAR-comparable 3D imaging results enable, for the first time, a variety of visual recognition tasks at radio frequency, including surface normal estimation, semantic segmentation, and object detection. PanoRadar utilizes a rotating single-chip mmWave radar, along with a combination of novel signal processing and machine learning algorithms, to create high-resolution 3D images of the surroundings. Our system accurately estimates robot motion, allowing for coherent imaging through a dense grid of synthetic antennas. It also exploits the high azimuth resolution to enhance elevation resolution using learning-based methods. Furthermore, PanoRadar tackles 3D learning via 2D convolutions and addresses challenges due to the unique characteristics of RF signals. Our results demonstrate PanoRadar's robust performance across 12 buildings.
MC-DGCNN: A Novel DNN Architecture for Multi-Category Point Set Classification
Dec 22, 2021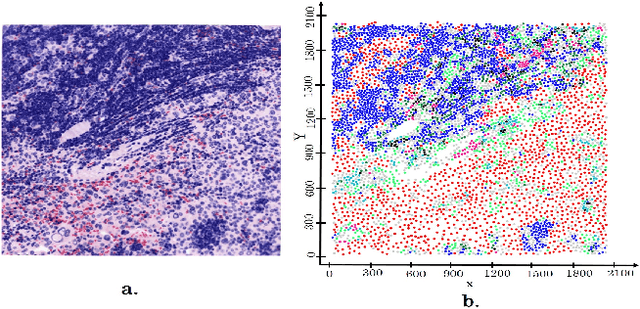

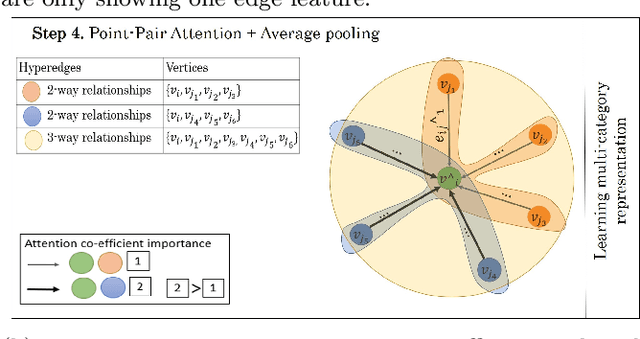
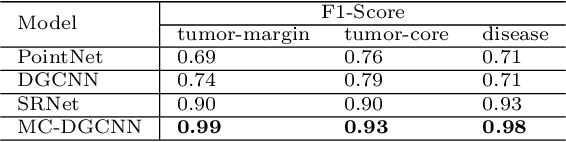
Point set classification aims to build a representation learning model that distinguishes between spatial and categorical configurations of point set data. This problem is societally important since in many applications domains such as immunology, and microbial ecology. This problem is challenging since the interactions between different categories of points are not always equal; as a result, the representation learning model must selectively learn the most relevant multi-categorical relationships. The related works are limited (1) in learning the importance of different multi-categorical relationships, especially for high-order interactions, and (2) do not fully exploit the spatial distribution of points beyond simply measuring relative distance or applying a feed-forward neural network to coordinates. To overcome these limitations, we leverage the dynamic graph convolutional neural network (DGCNN) architecture to design a novel multi-category DGCNN (MC-DGCNN), contributing location representation and point pair attention layers for multi-categorical point set classification. MC-DGCNN has the ability to identify the categorical importance of each point pair and extends this to N-way spatial relationships, while still preserving all the properties and benefits of DGCNN (e.g., differentiability). Experimental results show that the proposed architecture is computationally efficient and significantly outperforms current deep learning architectures on real-world datasets.
Towards Comparative Physical Interpretation of Spatial Variability Aware Neural Networks: A Summary of Results
Oct 29, 2021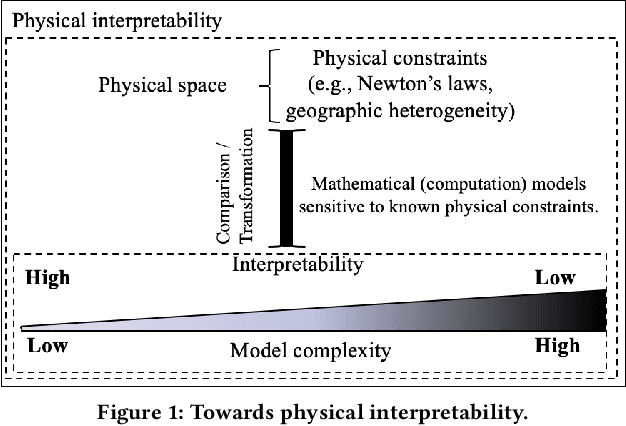
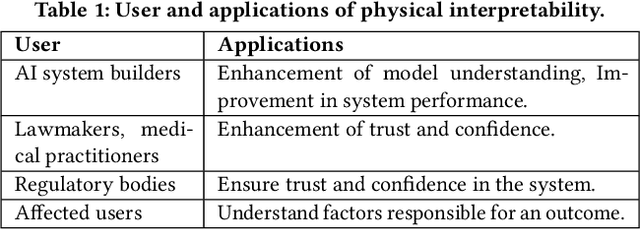
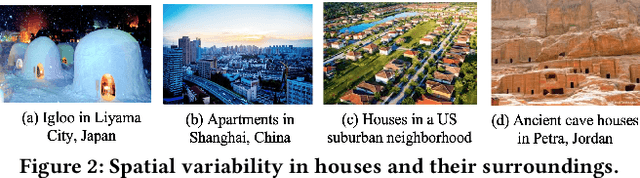
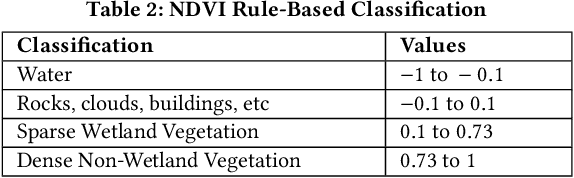
Given Spatial Variability Aware Neural Networks (SVANNs), the goal is to investigate mathematical (or computational) models for comparative physical interpretation towards their transparency (e.g., simulatibility, decomposability and algorithmic transparency). This problem is important due to important use-cases such as reusability, debugging, and explainability to a jury in a court of law. Challenges include a large number of model parameters, vacuous bounds on generalization performance of neural networks, risk of overfitting, sensitivity to noise, etc., which all detract from the ability to interpret the models. Related work on either model-specific or model-agnostic post-hoc interpretation is limited due to a lack of consideration of physical constraints (e.g., mass balance) and properties (e.g., second law of geography). This work investigates physical interpretation of SVANNs using novel comparative approaches based on geographically heterogeneous features. The proposed approach on feature-based physical interpretation is evaluated using a case-study on wetland mapping. The proposed physical interpretation improves the transparency of SVANN models and the analytical results highlight the trade-off between model transparency and model performance (e.g., F1-score). We also describe an interpretation based on geographically heterogeneous processes modeled as partial differential equations (PDEs).