 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAquaticVision: Benchmarking Visual SLAM in Underwater Environment with Events and Frames
May 06, 2025

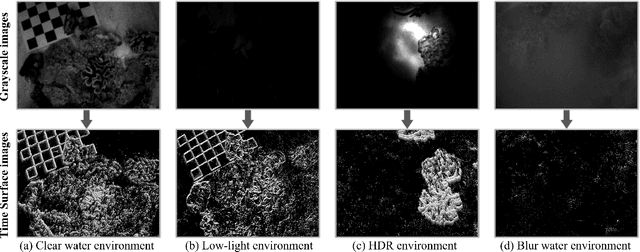

Many underwater applications, such as offshore asset inspections, rely on visual inspection and detailed 3D reconstruction. Recent advancements in underwater visual SLAM systems for aquatic environments have garnered significant attention in marine robotics research. However, existing underwater visual SLAM datasets often lack groundtruth trajectory data, making it difficult to objectively compare the performance of different SLAM algorithms based solely on qualitative results or COLMAP reconstruction. In this paper, we present a novel underwater dataset that includes ground truth trajectory data obtained using a motion capture system. Additionally, for the first time, we release visual data that includes both events and frames for benchmarking underwater visual positioning. By providing event camera data, we aim to facilitate the development of more robust and advanced underwater visual SLAM algorithms. The use of event cameras can help mitigate challenges posed by extremely low light or hazy underwater conditions. The webpage of our dataset is https://sites.google.com/view/aquaticvision-lias.
Bias-Eliminated PnP for Stereo Visual Odometry: Provably Consistent and Large-Scale Localization
Apr 24, 2025



In this paper, we first present a bias-eliminated weighted (Bias-Eli-W) perspective-n-point (PnP) estimator for stereo visual odometry (VO) with provable consistency. Specifically, leveraging statistical theory, we develop an asymptotically unbiased and $\sqrt {n}$-consistent PnP estimator that accounts for varying 3D triangulation uncertainties, ensuring that the relative pose estimate converges to the ground truth as the number of features increases. Next, on the stereo VO pipeline side, we propose a framework that continuously triangulates contemporary features for tracking new frames, effectively decoupling temporal dependencies between pose and 3D point errors. We integrate the Bias-Eli-W PnP estimator into the proposed stereo VO pipeline, creating a synergistic effect that enhances the suppression of pose estimation errors. We validate the performance of our method on the KITTI and Oxford RobotCar datasets. Experimental results demonstrate that our method: 1) achieves significant improvements in both relative pose error and absolute trajectory error in large-scale environments; 2) provides reliable localization under erratic and unpredictable robot motions. The successful implementation of the Bias-Eli-W PnP in stereo VO indicates the importance of information screening in robotic estimation tasks with high-uncertainty measurements, shedding light on diverse applications where PnP is a key ingredient.
NavigateDiff: Visual Predictors are Zero-Shot Navigation Assistants
Feb 19, 2025



Navigating unfamiliar environments presents significant challenges for household robots, requiring the ability to recognize and reason about novel decoration and layout. Existing reinforcement learning methods cannot be directly transferred to new environments, as they typically rely on extensive mapping and exploration, leading to time-consuming and inefficient. To address these challenges, we try to transfer the logical knowledge and the generalization ability of pre-trained foundation models to zero-shot navigation. By integrating a large vision-language model with a diffusion network, our approach named \mname ~constructs a visual predictor that continuously predicts the agent's potential observations in the next step which can assist robots generate robust actions. Furthermore, to adapt the temporal property of navigation, we introduce temporal historical information to ensure that the predicted image is aligned with the navigation scene. We then carefully designed an information fusion framework that embeds the predicted future frames as guidance into goal-reaching policy to solve downstream image navigation tasks. This approach enhances navigation control and generalization across both simulated and real-world environments. Through extensive experimentation, we demonstrate the robustness and versatility of our method, showcasing its potential to improve the efficiency and effectiveness of robotic navigation in diverse settings.
BESTAnP: Bi-Step Efficient and Statistically Optimal Estimator for Acoustic-n-Point Problem
Nov 26, 2024
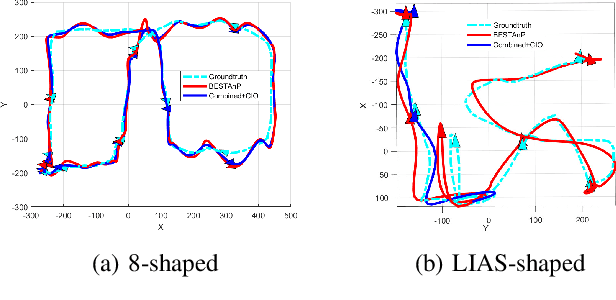
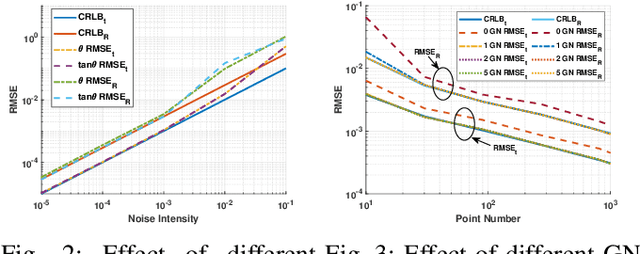
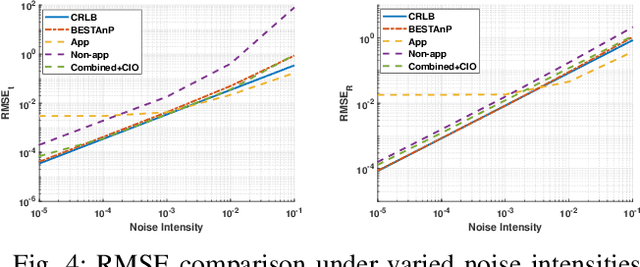
We consider the acoustic-n-point (AnP) problem, which estimates the pose of a 2D forward-looking sonar (FLS) according to n 3D-2D point correspondences. We explore the nature of the measured partial spherical coordinates and reveal their inherent relationships to translation and orientation. Based on this, we propose a bi-step efficient and statistically optimal AnP (BESTAnP) algorithm that decouples the estimation of translation and orientation. Specifically, in the first step, the translation estimation is formulated as the range-based localization problem based on distance-only measurements. In the second step, the rotation is estimated via eigendecomposition based on azimuth-only measurements and the estimated translation. BESTAnP is the first AnP algorithm that gives a closed-form solution for the full six-degree pose. In addition, we conduct bias elimination for BESTAnP such that it owns the statistical property of consistency. Through simulation and real-world experiments, we demonstrate that compared with the state-of-the-art (SOTA) methods, BESTAnP is over ten times faster and features real-time capacity in resource-constrained platforms while exhibiting comparable accuracy. Moreover, for the first time, we embed BESTAnP into a sonar-based odometry which shows its effectiveness for trajectory estimation.