 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Multi-robot Source Seeking in Unknown Environments with Unknown Number of Sources
Mar 14, 2025We introduce a novel distributed source seeking framework, DIAS, designed for multi-robot systems in scenarios where the number of sources is unknown and potentially exceeds the number of robots. Traditional robotic source seeking methods typically focused on directing each robot to a specific strong source and may fall short in comprehensively identifying all potential sources. DIAS addresses this gap by introducing a hybrid controller that identifies the presence of sources and then alternates between exploration for data gathering and exploitation for guiding robots to identified sources. It further enhances search efficiency by dividing the environment into Voronoi cells and approximating source density functions based on Gaussian process regression. Additionally, DIAS can be integrated with existing source seeking algorithms. We compare DIAS with existing algorithms, including DoSS and GMES in simulated gas leakage scenarios where the number of sources outnumbers or is equal to the number of robots. The numerical results show that DIAS outperforms the baseline methods in both the efficiency of source identification by the robots and the accuracy of the estimated environmental density function.
BESTAnP: Bi-Step Efficient and Statistically Optimal Estimator for Acoustic-n-Point Problem
Nov 26, 2024
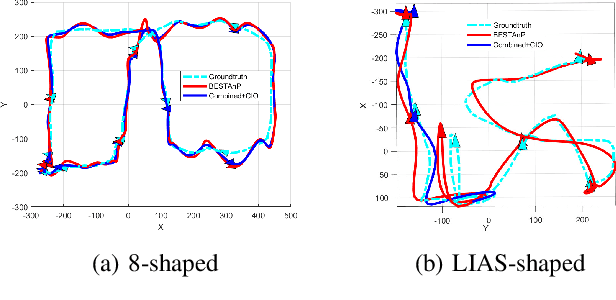
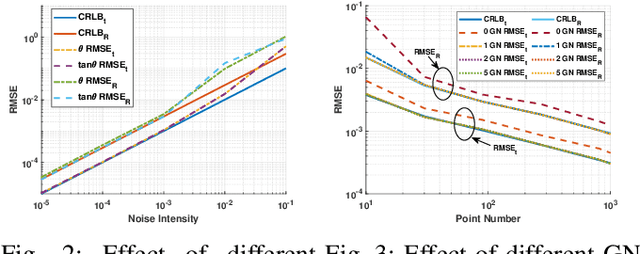
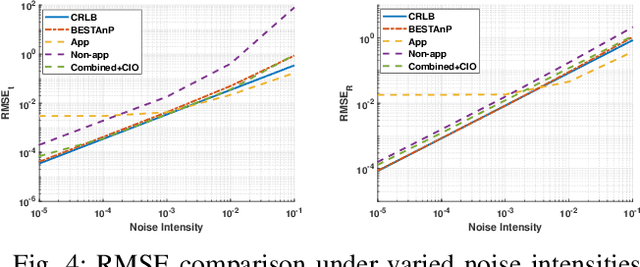
We consider the acoustic-n-point (AnP) problem, which estimates the pose of a 2D forward-looking sonar (FLS) according to n 3D-2D point correspondences. We explore the nature of the measured partial spherical coordinates and reveal their inherent relationships to translation and orientation. Based on this, we propose a bi-step efficient and statistically optimal AnP (BESTAnP) algorithm that decouples the estimation of translation and orientation. Specifically, in the first step, the translation estimation is formulated as the range-based localization problem based on distance-only measurements. In the second step, the rotation is estimated via eigendecomposition based on azimuth-only measurements and the estimated translation. BESTAnP is the first AnP algorithm that gives a closed-form solution for the full six-degree pose. In addition, we conduct bias elimination for BESTAnP such that it owns the statistical property of consistency. Through simulation and real-world experiments, we demonstrate that compared with the state-of-the-art (SOTA) methods, BESTAnP is over ten times faster and features real-time capacity in resource-constrained platforms while exhibiting comparable accuracy. Moreover, for the first time, we embed BESTAnP into a sonar-based odometry which shows its effectiveness for trajectory estimation.