 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCo-Evolutionary Multi-Modal Alignment via Structured Adversarial Evolution
Mar 02, 2026Adversarial behavior plays a central role in aligning large language models with human values. However, existing alignment methods largely rely on static adversarial settings, which fundamentally limit robustness, particularly in multimodal settings with a larger attack surface. In this work, we move beyond static adversarial supervision and introduce co-evolutionary alignment with evolving attacks, instantiated by CEMMA (Co-Evolutionary Multi-Modal Alignment), an automated and adaptive framework for multimodal safety alignment. We introduce an Evolutionary Attacker that decomposes adversarial prompts into method templates and harmful intents. By employing genetic operators, including mutation, crossover, and differential evolution, it enables simple seed attacks to inherit the structural efficacy of sophisticated jailbreaks. The Adaptive Defender is iteratively updated on the synthesized hard negatives, forming a closed-loop process that adapts alignment to evolving attacks. Experiments show that the Evolutionary Attacker substantially increases red-teaming jailbreak attack success rate (ASR), while the Adaptive Defender improves robustness and generalization across benchmarks with higher data efficiency, without inducing excessive benign refusal, and remains compatible with inference-time defenses such as AdaShield.
A Unified 3D Object Perception Framework for Real-Time Outside-In Multi-Camera Systems
Jan 15, 2026Accurate 3D object perception and multi-target multi-camera (MTMC) tracking are fundamental for the digital transformation of industrial infrastructure. However, transitioning "inside-out" autonomous driving models to "outside-in" static camera networks presents significant challenges due to heterogeneous camera placements and extreme occlusion. In this paper, we present an adapted Sparse4D framework specifically optimized for large-scale infrastructure environments. Our system leverages absolute world-coordinate geometric priors and introduces an occlusion-aware ReID embedding module to maintain identity stability across distributed sensor networks. To bridge the Sim2Real domain gap without manual labeling, we employ a generative data augmentation strategy using the NVIDIA COSMOS framework, creating diverse environmental styles that enhance the model's appearance-invariance. Evaluated on the AI City Challenge 2025 benchmark, our camera-only framework achieves a state-of-the-art HOTA of $45.22$. Furthermore, we address real-time deployment constraints by developing an optimized TensorRT plugin for Multi-Scale Deformable Aggregation (MSDA). Our hardware-accelerated implementation achieves a $2.15\times$ speedup on modern GPU architectures, enabling a single Blackwell-class GPU to support over 64 concurrent camera streams.
UACER: An Uncertainty-Aware Critic Ensemble Framework for Robust Adversarial Reinforcement Learning
Dec 11, 2025Robust adversarial reinforcement learning has emerged as an effective paradigm for training agents to handle uncertain disturbance in real environments, with critical applications in sequential decision-making domains such as autonomous driving and robotic control. Within this paradigm, agent training is typically formulated as a zero-sum Markov game between a protagonist and an adversary to enhance policy robustness. However, the trainable nature of the adversary inevitably induces non-stationarity in the learning dynamics, leading to exacerbated training instability and convergence difficulties, particularly in high-dimensional complex environments. In this paper, we propose a novel approach, Uncertainty-Aware Critic Ensemble for robust adversarial Reinforcement learning (UACER), which consists of two strategies: 1) Diversified critic ensemble: a diverse set of K critic networks is exploited in parallel to stabilize Q-value estimation rather than conventional single-critic architectures for both variance reduction and robustness enhancement. 2) Time-varying Decay Uncertainty (TDU) mechanism: advancing beyond simple linear combinations, we develop a variance-derived Q-value aggregation strategy that explicitly incorporates epistemic uncertainty to dynamically regulate the exploration-exploitation trade-off while simultaneously stabilizing the training process. Comprehensive experiments across several MuJoCo control problems validate the superior effectiveness of UACER, outperforming state-of-the-art methods in terms of overall performance, stability, and efficiency.
SongDriver: Real-time Music Accompaniment Generation without Logical Latency nor Exposure Bias
Sep 13, 2022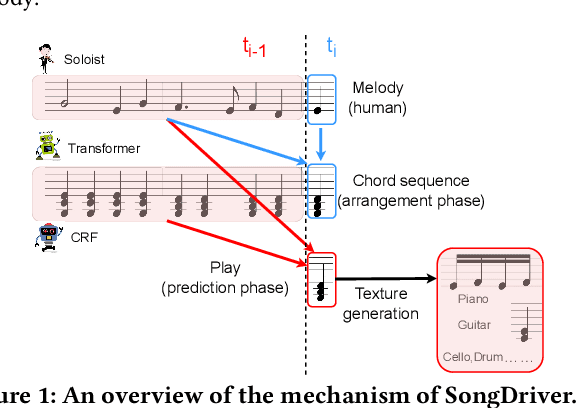
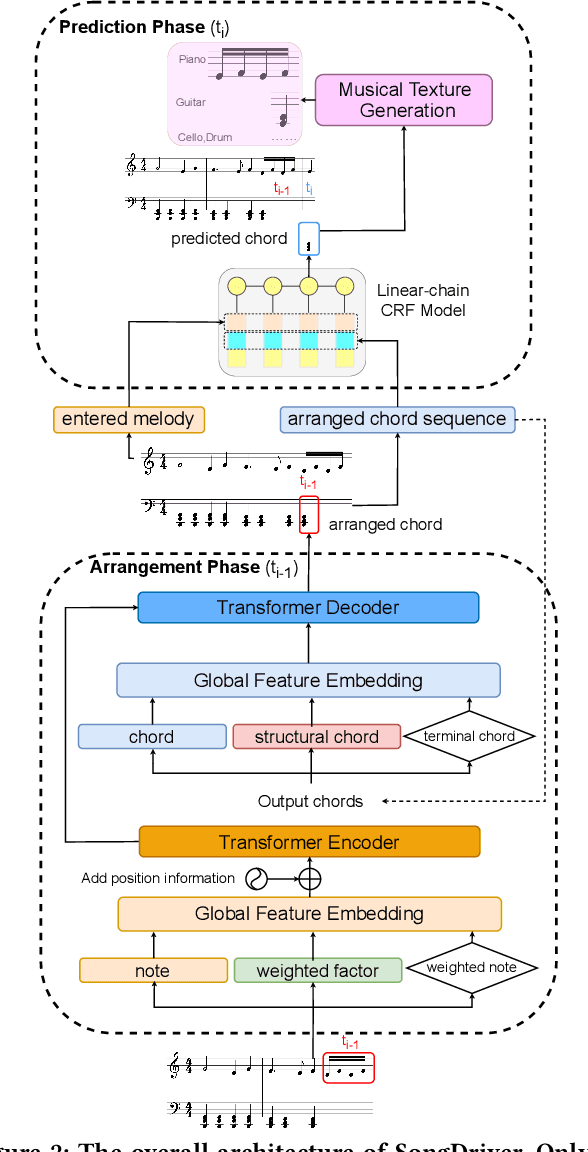

Real-time music accompaniment generation has a wide range of applications in the music industry, such as music education and live performances. However, automatic real-time music accompaniment generation is still understudied and often faces a trade-off between logical latency and exposure bias. In this paper, we propose SongDriver, a real-time music accompaniment generation system without logical latency nor exposure bias. Specifically, SongDriver divides one accompaniment generation task into two phases: 1) The arrangement phase, where a Transformer model first arranges chords for input melodies in real-time, and caches the chords for the next phase instead of playing them out. 2) The prediction phase, where a CRF model generates playable multi-track accompaniments for the coming melodies based on previously cached chords. With this two-phase strategy, SongDriver directly generates the accompaniment for the upcoming melody, achieving zero logical latency. Furthermore, when predicting chords for a timestep, SongDriver refers to the cached chords from the first phase rather than its previous predictions, which avoids the exposure bias problem. Since the input length is often constrained under real-time conditions, another potential problem is the loss of long-term sequential information. To make up for this disadvantage, we extract four musical features from a long-term music piece before the current time step as global information. In the experiment, we train SongDriver on some open-source datasets and an original \`aiSong Dataset built from Chinese-style modern pop music scores. The results show that SongDriver outperforms existing SOTA (state-of-the-art) models on both objective and subjective metrics, meanwhile significantly reducing the physical latency.
What Dense Graph Do You Need for Self-Attention?
Jun 09, 2022
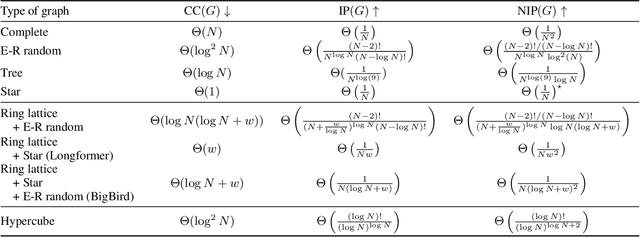
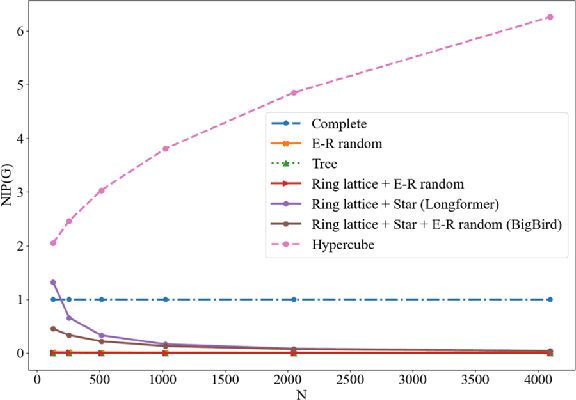
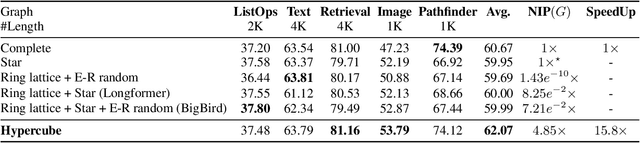
Transformers have made progress in miscellaneous tasks, but suffer from quadratic computational and memory complexities. Recent works propose sparse Transformers with attention on sparse graphs to reduce complexity and remain strong performance. While effective, the crucial parts of how dense a graph needs to be to perform well are not fully explored. In this paper, we propose Normalized Information Payload (NIP), a graph scoring function measuring information transfer on graph, which provides an analysis tool for trade-offs between performance and complexity. Guided by this theoretical analysis, we present Hypercube Transformer, a sparse Transformer that models token interactions in a hypercube and shows comparable or even better results with vanilla Transformer while yielding $O(N\log N)$ complexity with sequence length $N$. Experiments on tasks requiring various sequence lengths lay validation for our graph function well.
A Surrogate-Assisted Controller for Expensive Evolutionary Reinforcement Learning
Jan 01, 2022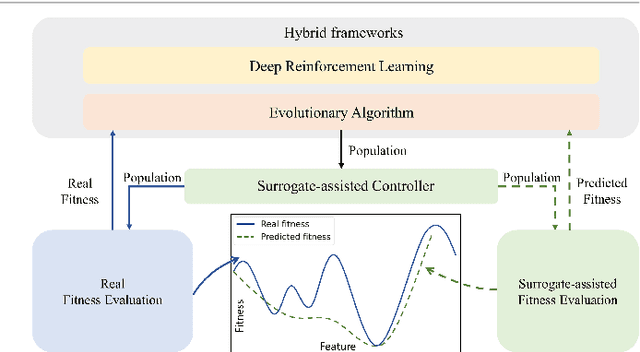

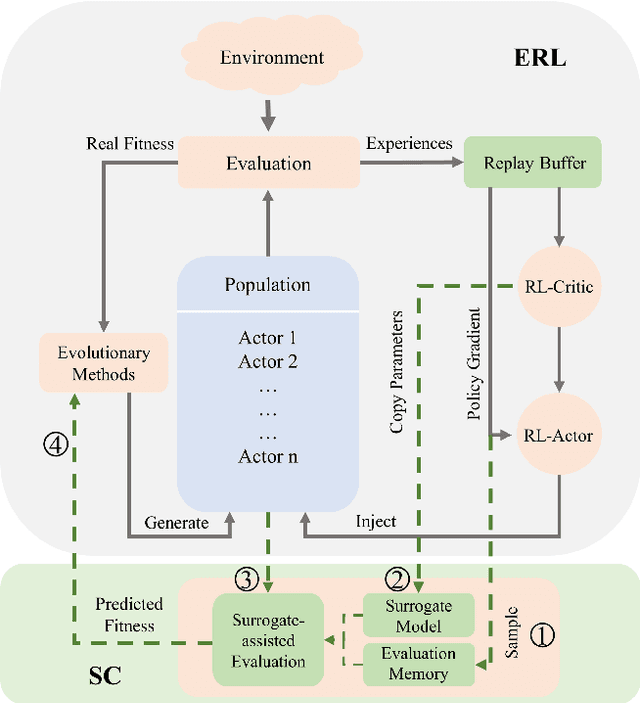

The integration of Reinforcement Learning (RL) and Evolutionary Algorithms (EAs) aims at simultaneously exploiting the sample efficiency as well as the diversity and robustness of the two paradigms. Recently, hybrid learning frameworks based on this principle have achieved great success in various challenging robot control tasks. However, in these methods, policies from the genetic population are evaluated via interactions with the real environments, limiting their applicability in computationally expensive problems. In this work, we propose Surrogate-assisted Controller (SC), a novel and efficient module that can be integrated into existing frameworks to alleviate the computational burden of EAs by partially replacing the expensive policy evaluation. The key challenge in applying this module is to prevent the optimization process from being misled by the possible false minima introduced by the surrogate. To address this issue, we present two strategies for SC to control the workflow of hybrid frameworks. Experiments on six continuous control tasks from the OpenAI Gym platform show that SC can not only significantly reduce the cost of fitness evaluations, but also boost the performance of the original hybrid frameworks with collaborative learning and evolutionary processes.