 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Voice to Safety: Language AI Powered Pilot-ATC Communication Understanding for Airport Surface Movement Collision Risk Assessment
Mar 06, 2025This work integrates language AI-based voice communication understanding with collision risk assessment. The proposed framework consists of two major parts, (a) Automatic Speech Recognition (ASR); (b) surface collision risk modeling. ASR module generates information tables by processing voice communication transcripts, which serve as references for producing potential taxi plans and calculating the surface movement collision risk. For ASR, we collect and annotate our own Named Entity Recognition (NER) dataset based on open-sourced video recordings and safety investigation reports. Additionally, we refer to FAA Order JO 7110.65W and FAA Order JO 7340.2N to get the list of heuristic rules and phase contractions of communication between the pilot and the Air Traffic Controller (ATCo) used in daily aviation operations. Then, we propose the novel ATC Rule-Enhanced NER method, which integrates the heuristic rules into the model training and inference stages, resulting into hybrid rule-based NER model. We show the effectiveness of this hybrid approach by comparing different setups with different token-level embedding models. For the risk modeling, we adopt the node-link airport layout graph from NASA FACET and model the aircraft taxi speed at each link as a log-normal distribution and derive the total taxi time distribution. Then, we propose a spatiotemporal formulation of the risk probability of two aircraft moving across potential collision nodes during ground movement. We show the effectiveness of our approach by simulating two case studies, (a) the Henada airport runway collision accident happened in January 2024; (b) the KATL taxiway collision happened in September 2024. We show that, by understanding the pilot-ATC communication transcripts and analyzing surface movement patterns, the proposed model improves airport safety by providing risk assessment in time.
Machine Learning-Enhanced Aircraft Landing Scheduling under Uncertainties
Nov 27, 2023



This paper addresses aircraft delays, emphasizing their impact on safety and financial losses. To mitigate these issues, an innovative machine learning (ML)-enhanced landing scheduling methodology is proposed, aiming to improve automation and safety. Analyzing flight arrival delay scenarios reveals strong multimodal distributions and clusters in arrival flight time durations. A multi-stage conditional ML predictor enhances separation time prediction based on flight events. ML predictions are then integrated as safety constraints in a time-constrained traveling salesman problem formulation, solved using mixed-integer linear programming (MILP). Historical flight recordings and model predictions address uncertainties between successive flights, ensuring reliability. The proposed method is validated using real-world data from the Atlanta Air Route Traffic Control Center (ARTCC ZTL). Case studies demonstrate an average 17.2% reduction in total landing time compared to the First-Come-First-Served (FCFS) rule. Unlike FCFS, the proposed methodology considers uncertainties, instilling confidence in scheduling. The study concludes with remarks and outlines future research directions.
Air Traffic Controller Workload Level Prediction using Conformalized Dynamical Graph Learning
Jul 22, 2023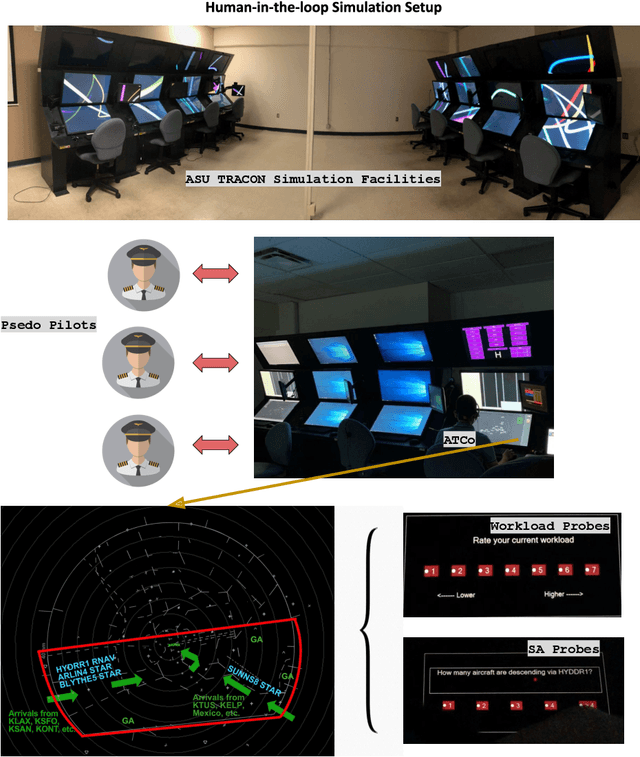
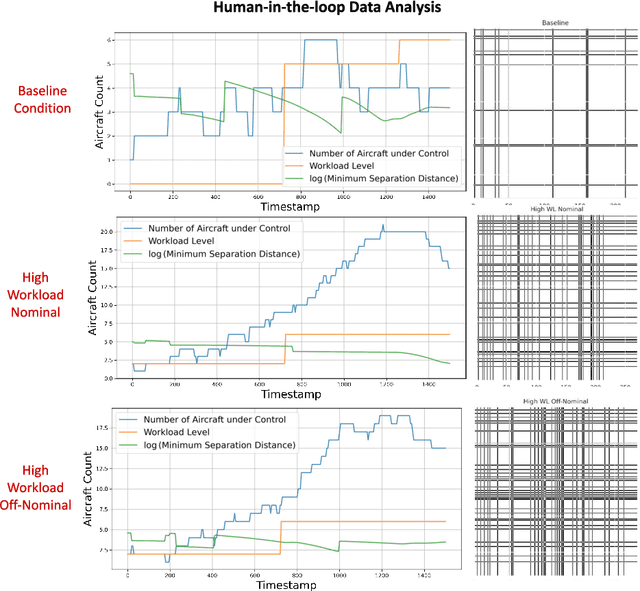

Air traffic control (ATC) is a safety-critical service system that demands constant attention from ground air traffic controllers (ATCos) to maintain daily aviation operations. The workload of the ATCos can have negative effects on operational safety and airspace usage. To avoid overloading and ensure an acceptable workload level for the ATCos, it is important to predict the ATCos' workload accurately for mitigation actions. In this paper, we first perform a review of research on ATCo workload, mostly from the air traffic perspective. Then, we briefly introduce the setup of the human-in-the-loop (HITL) simulations with retired ATCos, where the air traffic data and workload labels are obtained. The simulations are conducted under three Phoenix approach scenarios while the human ATCos are requested to self-evaluate their workload ratings (i.e., low-1 to high-7). Preliminary data analysis is conducted. Next, we propose a graph-based deep-learning framework with conformal prediction to identify the ATCo workload levels. The number of aircraft under the controller's control varies both spatially and temporally, resulting in dynamically evolving graphs. The experiment results suggest that (a) besides the traffic density feature, the traffic conflict feature contributes to the workload prediction capabilities (i.e., minimum horizontal/vertical separation distance); (b) directly learning from the spatiotemporal graph layout of airspace with graph neural network can achieve higher prediction accuracy, compare to hand-crafted traffic complexity features; (c) conformal prediction is a valuable tool to further boost model prediction accuracy, resulting a range of predicted workload labels. The code used is available at \href{https://github.com/ymlasu/para-atm-collection/blob/master/air-traffic-prediction/ATC-Workload-Prediction/}{$\mathsf{Link}$}.
B-BACN: Bayesian Boundary-Aware Convolutional Network for Crack Characterization
Feb 17, 2023
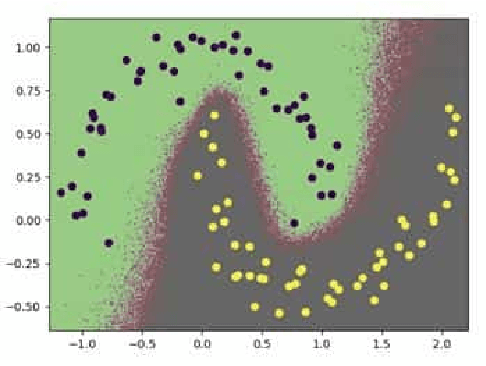
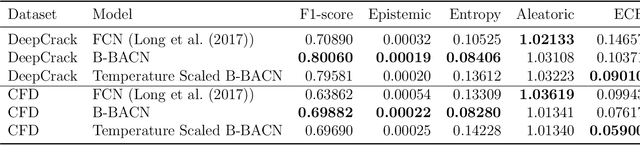
The accurate detection of crack boundaries is crucial for various purposes, such as condition monitoring, prognostics, and maintenance scheduling. To address this issue, we introduce a Bayesian Boundary-Aware Convolutional Network (B-BACN) that emphasizes the significance of both uncertainty quantification and boundary refinement to generate precise and reliable defect boundary detections. Our inspection model employs a multi-task learning approach, where we use Monte Carlo Dropout to learn the epistemic uncertainty and a Gaussian sampling function to predict each sample's aleatoric uncertainty. Moreover, we include a boundary refinement loss to B-BACN to enhance the determination of defect boundaries. The experimental results illustrate the effectiveness of our proposed approach in identifying crack boundaries with high accuracy, minimizing misclassification rate, and improving model calibration capabilities.
Posterior Regularized Bayesian Neural Network Incorporating Soft and Hard Knowledge Constraints
Oct 16, 2022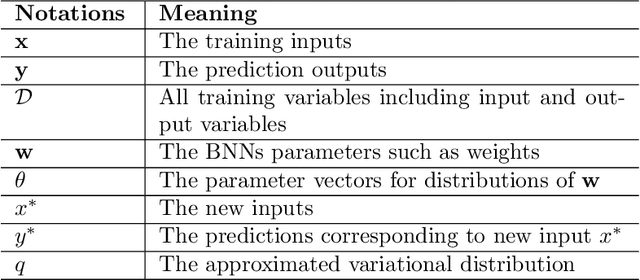
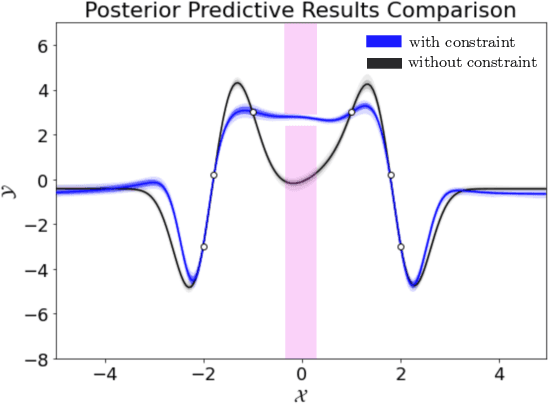
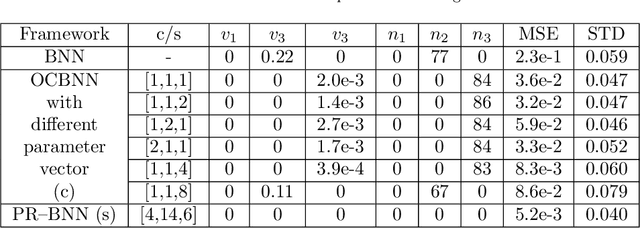
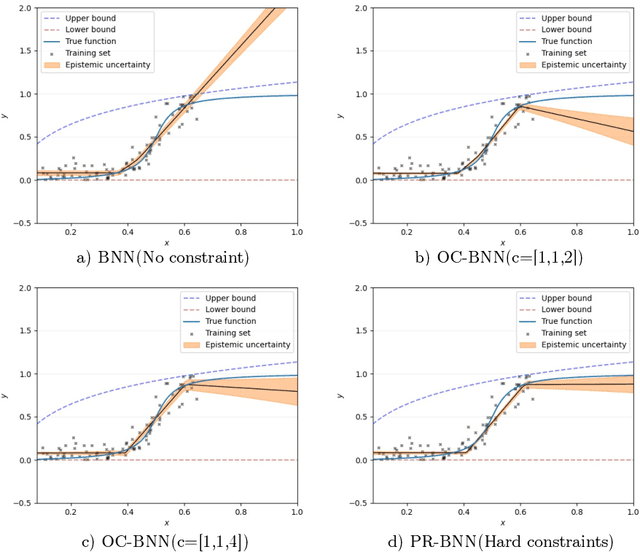
Neural Networks (NNs) have been widely {used in supervised learning} due to their ability to model complex nonlinear patterns, often presented in high-dimensional data such as images and text. However, traditional NNs often lack the ability for uncertainty quantification. Bayesian NNs (BNNS) could help measure the uncertainty by considering the distributions of the NN model parameters. Besides, domain knowledge is commonly available and could improve the performance of BNNs if it can be appropriately incorporated. In this work, we propose a novel Posterior-Regularized Bayesian Neural Network (PR-BNN) model by incorporating different types of knowledge constraints, such as the soft and hard constraints, as a posterior regularization term. Furthermore, we propose to combine the augmented Lagrangian method and the existing BNN solvers for efficient inference. The experiments in simulation and two case studies about aviation landing prediction and solar energy output prediction have shown the knowledge constraints and the performance improvement of the proposed model over traditional BNNs without the constraints.
ProspectNet: Weighted Conditional Attention for Future Interaction Modeling in Behavior Prediction
Aug 29, 2022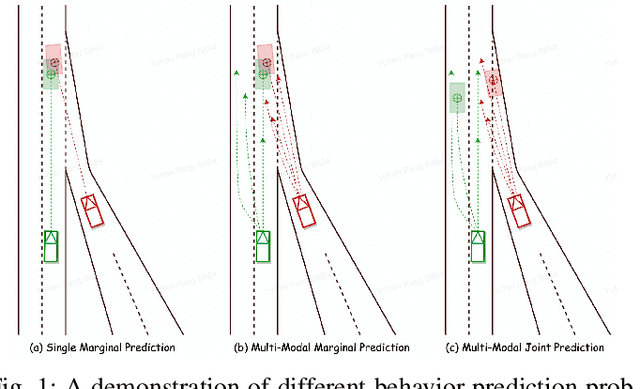

Behavior prediction plays an important role in integrated autonomous driving software solutions. In behavior prediction research, interactive behavior prediction is a less-explored area, compared to single-agent behavior prediction. Predicting the motion of interactive agents requires initiating novel mechanisms to capture the joint behaviors of the interactive pairs. In this work, we formulate the end-to-end joint prediction problem as a sequential learning process of marginal learning and joint learning of vehicle behaviors. We propose ProspectNet, a joint learning block that adopts the weighted attention score to model the mutual influence between interactive agent pairs. The joint learning block first weighs the multi-modal predicted candidate trajectories, then updates the ego-agent's embedding via cross attention. Furthermore, we broadcast the individual future predictions for each interactive agent into a pair-wise scoring module to select the top $K$ prediction pairs. We show that ProspectNet outperforms the Cartesian product of two marginal predictions, and achieves comparable performance on the Waymo Interactive Motion Prediction benchmarks.
Decentralized Graph-Based Multi-Agent Reinforcement Learning Using Reward Machines
Sep 30, 2021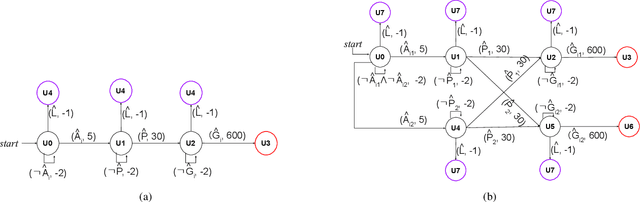
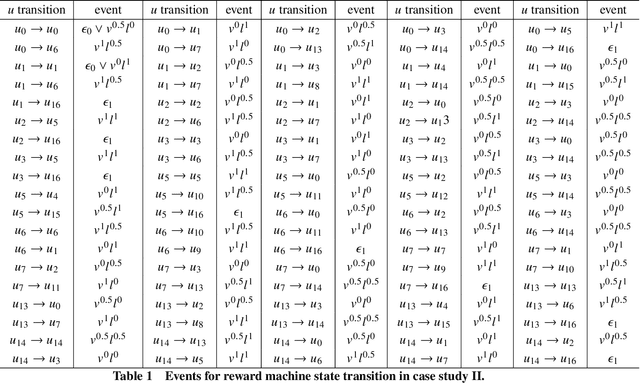

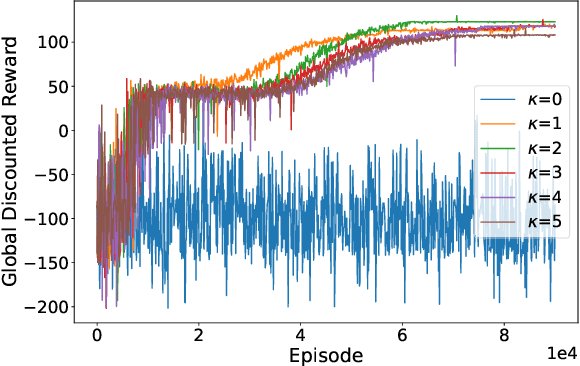
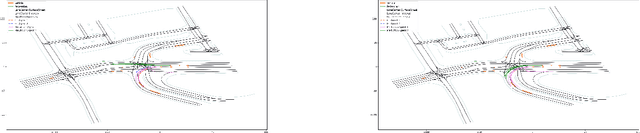
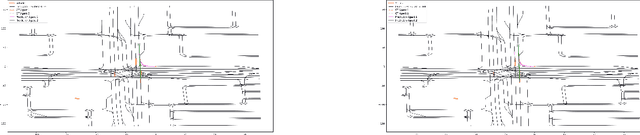
In multi-agent reinforcement learning (MARL), it is challenging for a collection of agents to learn complex temporally extended tasks. The difficulties lie in computational complexity and how to learn the high-level ideas behind reward functions. We study the graph-based Markov Decision Process (MDP) where the dynamics of neighboring agents are coupled. We use a reward machine (RM) to encode each agent's task and expose reward function internal structures. RM has the capacity to describe high-level knowledge and encode non-Markovian reward functions. We propose a decentralized learning algorithm to tackle computational complexity, called decentralized graph-based reinforcement learning using reward machines (DGRM), that equips each agent with a localized policy, allowing agents to make decisions independently, based on the information available to the agents. DGRM uses the actor-critic structure, and we introduce the tabular Q-function for discrete state problems. We show that the dependency of Q-function on other agents decreases exponentially as the distance between them increases. Furthermore, the complexity of DGRM is related to the local information size of the largest $\kappa$-hop neighborhood, and DGRM can find an $O(\rho^{\kappa+1})$-approximation of a stationary point of the objective function. To further improve efficiency, we also propose the deep DGRM algorithm, using deep neural networks to approximate the Q-function and policy function to solve large-scale or continuous state problems. The effectiveness of the proposed DGRM algorithm is evaluated by two case studies, UAV package delivery and COVID-19 pandemic mitigation. Experimental results show that local information is sufficient for DGRM and agents can accomplish complex tasks with the help of RM. DGRM improves the global accumulated reward by 119% compared to the baseline in the case of COVID-19 pandemic mitigation.
Evaluating the Robustness of Bayesian Neural Networks Against Different Types of Attacks
Jun 17, 2021

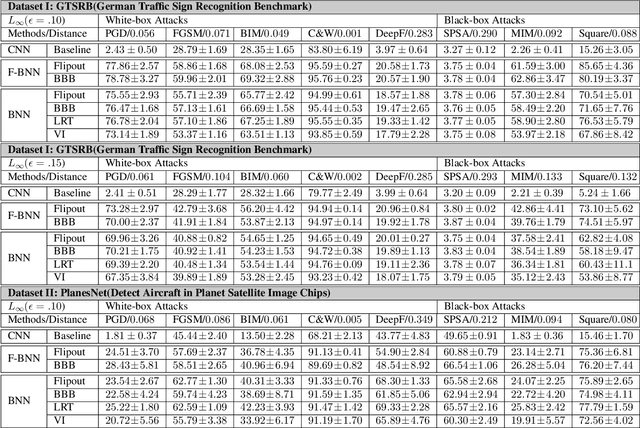
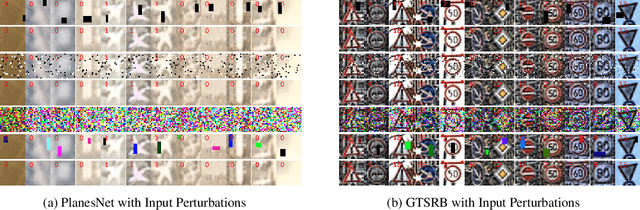
To evaluate the robustness gain of Bayesian neural networks on image classification tasks, we perform input perturbations, and adversarial attacks to the state-of-the-art Bayesian neural networks, with a benchmark CNN model as reference. The attacks are selected to simulate signal interference and cyberattacks towards CNN-based machine learning systems. The result shows that a Bayesian neural network achieves significantly higher robustness against adversarial attacks generated against a deterministic neural network model, without adversarial training. The Bayesian posterior can act as the safety precursor of ongoing malicious activities. Furthermore, we show that the stochastic classifier after the deterministic CNN extractor has sufficient robustness enhancement rather than a stochastic feature extractor before the stochastic classifier. This advises on utilizing stochastic layers in building decision-making pipelines within a safety-critical domain.