 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProspectNet: Weighted Conditional Attention for Future Interaction Modeling in Behavior Prediction
Paper and Code
Aug 29, 2022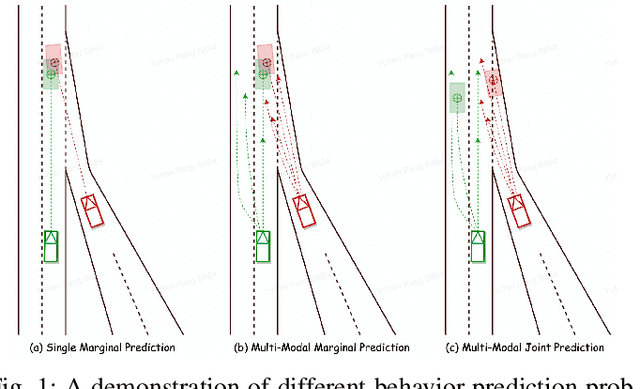

Behavior prediction plays an important role in integrated autonomous driving software solutions. In behavior prediction research, interactive behavior prediction is a less-explored area, compared to single-agent behavior prediction. Predicting the motion of interactive agents requires initiating novel mechanisms to capture the joint behaviors of the interactive pairs. In this work, we formulate the end-to-end joint prediction problem as a sequential learning process of marginal learning and joint learning of vehicle behaviors. We propose ProspectNet, a joint learning block that adopts the weighted attention score to model the mutual influence between interactive agent pairs. The joint learning block first weighs the multi-modal predicted candidate trajectories, then updates the ego-agent's embedding via cross attention. Furthermore, we broadcast the individual future predictions for each interactive agent into a pair-wise scoring module to select the top $K$ prediction pairs. We show that ProspectNet outperforms the Cartesian product of two marginal predictions, and achieves comparable performance on the Waymo Interactive Motion Prediction benchmarks.