 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDenoising bivariate signals via smoothing and polarization priors
Feb 28, 2025We propose two formulations to leverage the geometric properties of bivariate signals for dealing with the denoising problem. In doing so, we use the instantaneous Stokes parameters to incorporate the polarization state of the signal. While the first formulation exploits the statistics of the Stokes representation in a Bayesian setting, the second uses a kernel regression formulation to impose locally smooth time-varying polarization properties. In turn, we obtain two formulations that allow us to use both signal and polarization domain regularization for denoising a bivariate signal. The solutions to them exploit the polarization information efficiently as demonstrated in the numerical simulations
Variance Reduction for Inverse Trace Estimation via Random Spanning Forests
Jun 15, 2022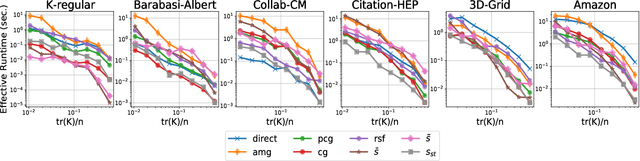
The trace $\tr(q(\ma{L} + q\ma{I})^{-1})$, where $\ma{L}$ is a symmetric diagonally dominant matrix, is the quantity of interest in some machine learning problems. However, its direct computation is impractical if the matrix size is large. State-of-the-art methods include Hutchinson's estimator combined with iterative solvers, as well as the estimator based on random spanning forests (a random process on graphs). In this work, we show two ways of improving the forest-based estimator via well-known variance reduction techniques, namely control variates and stratified sampling. Implementing these techniques is easy, and provides substantial variance reduction, yielding comparable or better performance relative to state-of-the-art algorithms.
Graph Domain Adaptation with Localized Graph Signal Representations
Nov 07, 2019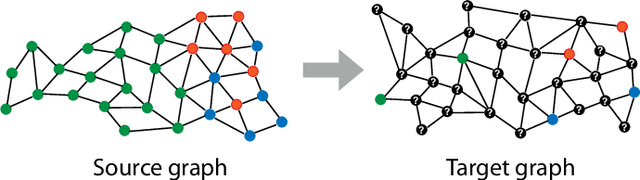
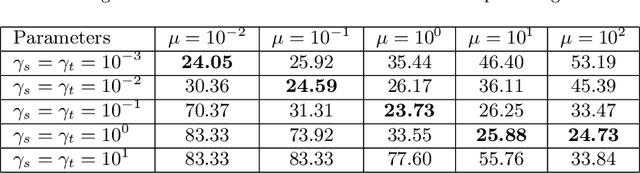
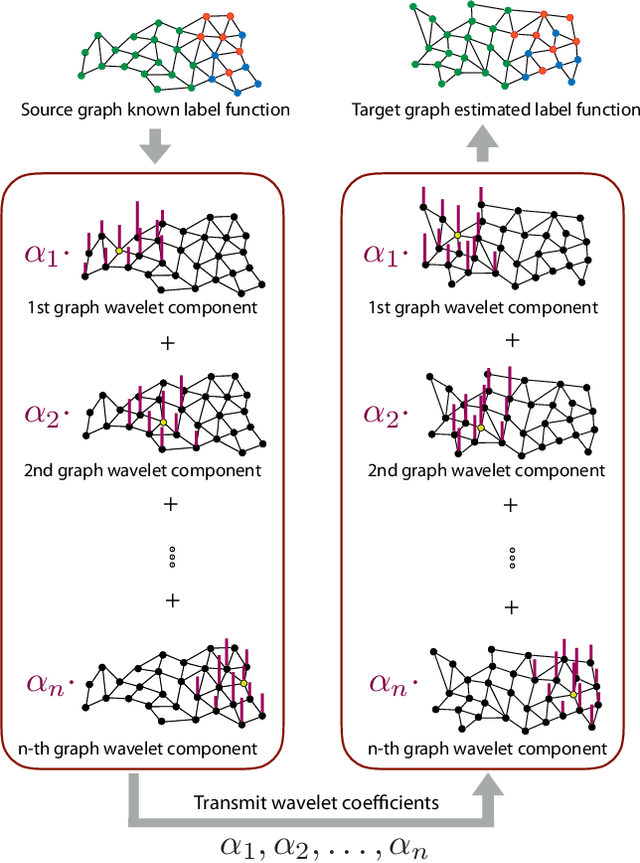
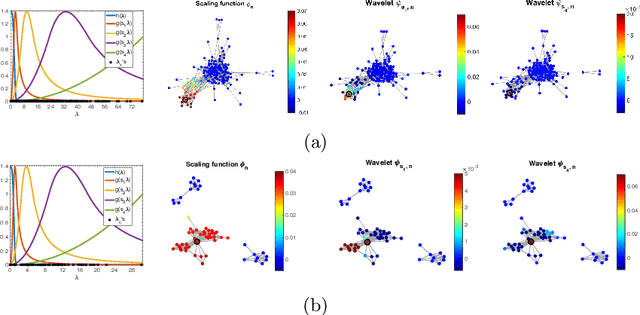
In this paper we propose a domain adaptation algorithm designed for graph domains. Given a source graph with many labeled nodes and a target graph with few or no labeled nodes, we aim to estimate the target labels by making use of the similarity between the characteristics of the variation of the label functions on the two graphs. Our assumption about the source and the target domains is that the local behaviour of the label function, such as its spread and speed of variation on the graph, bears resemblance between the two graphs. We estimate the unknown target labels by solving an optimization problem where the label information is transferred from the source graph to the target graph based on the prior that the projections of the label functions onto localized graph bases be similar between the source and the target graphs. In order to efficiently capture the local variation of the label functions on the graphs, spectral graph wavelets are used as the graph bases. Experimentation on various data sets shows that the proposed method yields quite satisfactory classification accuracy compared to reference domain adaptation methods.
Sparse-then-Dense Alignment based 3D Map Reconstruction Method for Endoscopic Capsule Robots
Aug 29, 2017
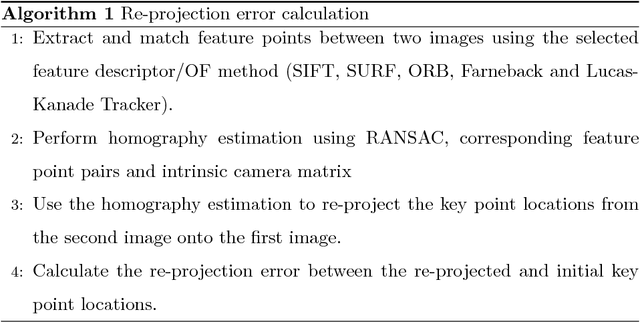


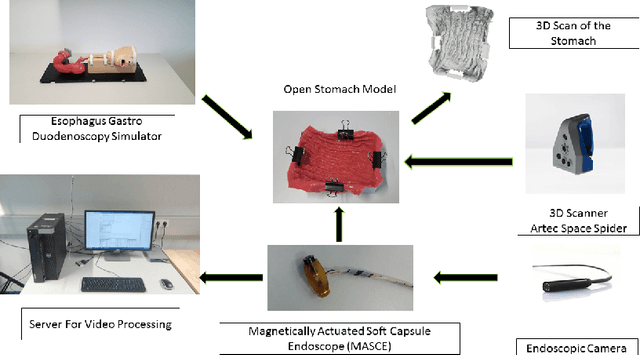
Since the development of capsule endoscopcy technology, substantial progress were made in converting passive capsule endoscopes to robotic active capsule endoscopes which can be controlled by the doctor. However, robotic capsule endoscopy still has some challenges. In particular, the use of such devices to generate a precise and globally consistent three-dimensional (3D) map of the entire inner organ remains an unsolved problem. Such global 3D maps of inner organs would help doctors to detect the location and size of diseased areas more accurately, precisely, and intuitively, thus permitting more accurate and intuitive diagnoses. The proposed 3D reconstruction system is built in a modular fashion including preprocessing, frame stitching, and shading-based 3D reconstruction modules. We propose an efficient scheme to automatically select the key frames out of the huge quantity of raw endoscopic images. Together with a bundle fusion approach that aligns all the selected key frames jointly in a globally consistent way, a significant improvement of the mosaic and 3D map accuracy was reached. To the best of our knowledge, this framework is the first complete pipeline for an endoscopic capsule robot based 3D map reconstruction containing all of the necessary steps for a reliable and accurate endoscopic 3D map. For the qualitative evaluations, a real pig stomach is employed. Moreover, for the first time in literature, a detailed and comprehensive quantitative analysis of each proposed pipeline modules is performed using a non-rigid esophagus gastro duodenoscopy simulator, four different endoscopic cameras, a magnetically activated soft capsule robot (MASCE), a sub-millimeter precise optical motion tracker and a fine-scale 3D optical scanner.
A fully dense and globally consistent 3D map reconstruction approach for GI tract to enhance therapeutic relevance of the endoscopic capsule robot
May 18, 2017


In the gastrointestinal (GI) tract endoscopy field, ingestible wireless capsule endoscopy is emerging as a novel, minimally invasive diagnostic technology for inspection of the GI tract and diagnosis of a wide range of diseases and pathologies. Since the development of this technology, medical device companies and many research groups have made substantial progress in converting passive capsule endoscopes to robotic active capsule endoscopes with most of the functionality of current active flexible endoscopes. However, robotic capsule endoscopy still has some challenges. In particular, the use of such devices to generate a precise three-dimensional (3D) mapping of the entire inner organ remains an unsolved problem. Such global 3D maps of inner organs would help doctors to detect the location and size of diseased areas more accurately and intuitively, thus permitting more reliable diagnoses. To our knowledge, this paper presents the first complete pipeline for a complete 3D visual map reconstruction of the stomach. The proposed pipeline is modular and includes a preprocessing module, an image registration module, and a final shape-from-shading-based 3D reconstruction module; the 3D map is primarily generated by a combination of image stitching and shape-from-shading techniques, and is updated in a frame-by-frame iterative fashion via capsule motion inside the stomach. A comprehensive quantitative analysis of the proposed 3D reconstruction method is performed using an esophagus gastro duodenoscopy simulator, three different endoscopic cameras, and a 3D optical scanner.