 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Llama 4 Herd: Architecture, Training, Evaluation, and Deployment Notes
Jan 15, 2026This document consolidates publicly reported technical details about Metas Llama 4 model family. It summarizes (i) released variants (Scout and Maverick) and the broader herd context including the previewed Behemoth teacher model, (ii) architectural characteristics beyond a high-level MoE description covering routed/shared-expert structure, early-fusion multimodality, and long-context design elements reported for Scout (iRoPE and length generalization strategies), (iii) training disclosures spanning pre-training, mid-training for long-context extension, and post-training methodology (lightweight SFT, online RL, and lightweight DPO) as described in release materials, (iv) developer-reported benchmark results for both base and instruction-tuned checkpoints, and (v) practical deployment constraints observed across major serving environments, including provider-specific context limits and quantization packaging. The manuscript also summarizes licensing obligations relevant to redistribution and derivative naming, and reviews publicly described safeguards and evaluation practices. The goal is to provide a compact technical reference for researchers and practitioners who need precise, source-backed facts about Llama 4.
Decoupled Functional Evaluation of Autonomous Driving Models via Feature Map Quality Scoring
Aug 12, 2025End-to-end models are emerging as the mainstream in autonomous driving perception and planning. However, the lack of explicit supervision signals for intermediate functional modules leads to opaque operational mechanisms and limited interpretability, making it challenging for traditional methods to independently evaluate and train these modules. Pioneering in the issue, this study builds upon the feature map-truth representation similarity-based evaluation framework and proposes an independent evaluation method based on Feature Map Convergence Score (FMCS). A Dual-Granularity Dynamic Weighted Scoring System (DG-DWSS) is constructed, formulating a unified quantitative metric - Feature Map Quality Score - to enable comprehensive evaluation of the quality of feature maps generated by functional modules. A CLIP-based Feature Map Quality Evaluation Network (CLIP-FMQE-Net) is further developed, combining feature-truth encoders and quality score prediction heads to enable real-time quality analysis of feature maps generated by functional modules. Experimental results on the NuScenes dataset demonstrate that integrating our evaluation module into the training improves 3D object detection performance, achieving a 3.89 percent gain in NDS. These results verify the effectiveness of our method in enhancing feature representation quality and overall model performance.
NTP-INT: Network Traffic Prediction-Driven In-band Network Telemetry for High-load Switches
Feb 18, 2025



In-band network telemetry (INT) is essential to network management due to its real-time visibility. However, because of the rapid increase in network devices and services, it has become crucial to have targeted access to detailed network information in a dynamic network environment. This paper proposes an intelligent network telemetry system called NTP-INT to obtain more fine-grained network information on high-load switches. Specifically, NTP-INT consists of three modules: network traffic prediction module, network pruning module, and probe path planning module. Firstly, the network traffic prediction module adopts a Multi-Temporal Graph Neural Network (MTGNN) to predict future network traffic and identify high-load switches. Then, we design the network pruning algorithm to generate a subnetwork covering all high-load switches to reduce the complexity of probe path planning. Finally, the probe path planning module uses an attention-mechanism-based deep reinforcement learning (DEL) model to plan efficient probe paths in the network slice. The experimental results demonstrate that NTP-INT can acquire more precise network information on high-load switches while decreasing the control overhead by 50\%.
Unveiling the Black Box: Independent Functional Module Evaluation for Bird's-Eye-View Perception Model
Sep 18, 2024End-to-end models are emerging as the mainstream in autonomous driving perception. However, the inability to meticulously deconstruct their internal mechanisms results in diminished development efficacy and impedes the establishment of trust. Pioneering in the issue, we present the Independent Functional Module Evaluation for Bird's-Eye-View Perception Model (BEV-IFME), a novel framework that juxtaposes the module's feature maps against Ground Truth within a unified semantic Representation Space to quantify their similarity, thereby assessing the training maturity of individual functional modules. The core of the framework lies in the process of feature map encoding and representation aligning, facilitated by our proposed two-stage Alignment AutoEncoder, which ensures the preservation of salient information and the consistency of feature structure. The metric for evaluating the training maturity of functional modules, Similarity Score, demonstrates a robust positive correlation with BEV metrics, with an average correlation coefficient of 0.9387, attesting to the framework's reliability for assessment purposes.
OE-BevSeg: An Object Informed and Environment Aware Multimodal Framework for Bird's-eye-view Vehicle Semantic Segmentation
Jul 18, 2024Bird's-eye-view (BEV) semantic segmentation is becoming crucial in autonomous driving systems. It realizes ego-vehicle surrounding environment perception by projecting 2D multi-view images into 3D world space. Recently, BEV segmentation has made notable progress, attributed to better view transformation modules, larger image encoders, or more temporal information. However, there are still two issues: 1) a lack of effective understanding and enhancement of BEV space features, particularly in accurately capturing long-distance environmental features and 2) recognizing fine details of target objects. To address these issues, we propose OE-BevSeg, an end-to-end multimodal framework that enhances BEV segmentation performance through global environment-aware perception and local target object enhancement. OE-BevSeg employs an environment-aware BEV compressor. Based on prior knowledge about the main composition of the BEV surrounding environment varying with the increase of distance intervals, long-sequence global modeling is utilized to improve the model's understanding and perception of the environment. From the perspective of enriching target object information in segmentation results, we introduce the center-informed object enhancement module, using centerness information to supervise and guide the segmentation head, thereby enhancing segmentation performance from a local enhancement perspective. Additionally, we designed a multimodal fusion branch that integrates multi-view RGB image features with radar/LiDAR features, achieving significant performance improvements. Extensive experiments show that, whether in camera-only or multimodal fusion BEV segmentation tasks, our approach achieves state-of-the-art results by a large margin on the nuScenes dataset for vehicle segmentation, demonstrating superior applicability in the field of autonomous driving.
Hierarchical and Decoupled BEV Perception Learning Framework for Autonomous Driving
Jul 17, 2024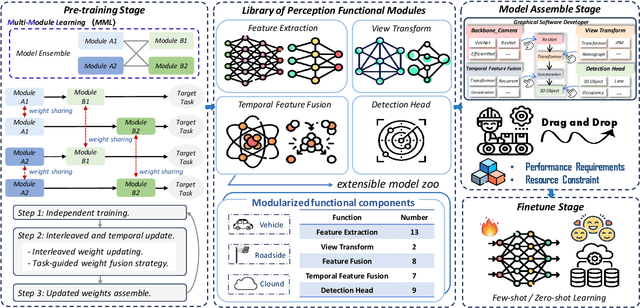
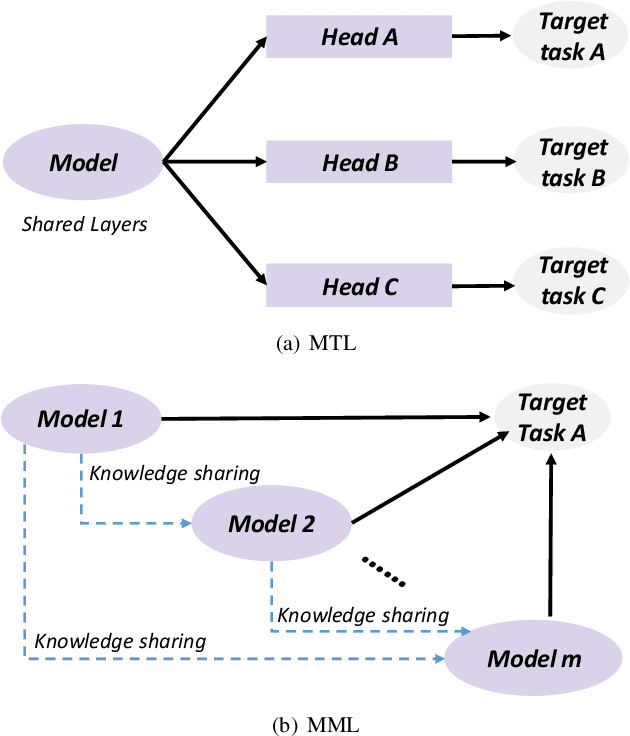
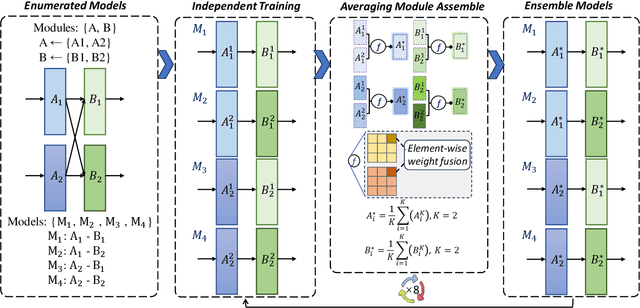
Perception is essential for autonomous driving system. Recent approaches based on Bird's-eye-view (BEV) and deep learning have made significant progress. However, there exists challenging issues including lengthy development cycles, poor reusability, and complex sensor setups in perception algorithm development process. To tackle the above challenges, this paper proposes a novel hierarchical Bird's-eye-view (BEV) perception paradigm, aiming to provide a library of fundamental perception modules and user-friendly graphical interface, enabling swift construction of customized models. We conduct the Pretrain-Finetune strategy to effectively utilize large scale public datasets and streamline development processes. Specifically, we present a Multi-Module Learning (MML) approach, enhancing performance through synergistic and iterative training of multiple models. Extensive experimental results on the Nuscenes dataset demonstrate that our approach renders significant improvement over the traditional training method.