 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAchieving Hiding and Smart Anti-Jamming Communication: A Parallel DRL Approach against Moving Reactive Jammer
Feb 04, 2025



This paper addresses the challenge of anti-jamming in moving reactive jamming scenarios. The moving reactive jammer initiates high-power tracking jamming upon detecting any transmission activity, and when unable to detect a signal, resorts to indiscriminate jamming. This presents dual imperatives: maintaining hiding to avoid the jammer's detection and simultaneously evading indiscriminate jamming. Spread spectrum techniques effectively reduce transmitting power to elude detection but fall short in countering indiscriminate jamming. Conversely, changing communication frequencies can help evade indiscriminate jamming but makes the transmission vulnerable to tracking jamming without spread spectrum techniques to remain hidden. Current methodologies struggle with the complexity of simultaneously optimizing these two requirements due to the expansive joint action spaces and the dynamics of moving reactive jammers. To address these challenges, we propose a parallelized deep reinforcement learning (DRL) strategy. The approach includes a parallelized network architecture designed to decompose the action space. A parallel exploration-exploitation selection mechanism replaces the $\varepsilon $-greedy mechanism, accelerating convergence. Simulations demonstrate a nearly 90\% increase in normalized throughput.
Depth Estimation by Combining Binocular Stereo and Monocular Structured-Light
Mar 20, 2022
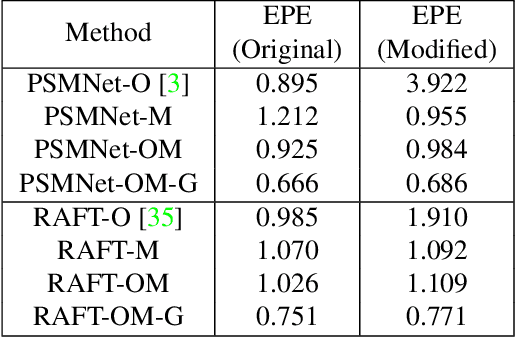
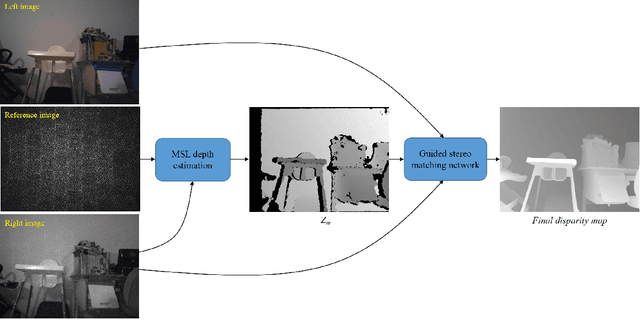
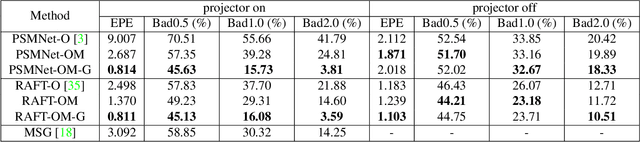
It is well known that the passive stereo system cannot adapt well to weak texture objects, e.g., white walls. However, these weak texture targets are very common in indoor environments. In this paper, we present a novel stereo system, which consists of two cameras (an RGB camera and an IR camera) and an IR speckle projector. The RGB camera is used both for depth estimation and texture acquisition. The IR camera and the speckle projector can form a monocular structured-light (MSL) subsystem, while the two cameras can form a binocular stereo subsystem. The depth map generated by the MSL subsystem can provide external guidance for the stereo matching networks, which can improve the matching accuracy significantly. In order to verify the effectiveness of the proposed system, we build a prototype and collect a test dataset in indoor scenes. The evaluation results show that the Bad 2.0 error of the proposed system is 28.2% of the passive stereo system when the network RAFT is used. The dataset and trained models are available at https://github.com/YuhuaXu/MonoStereoFusion.
Bilateral Grid Learning for Stereo Matching Network
Jan 01, 2021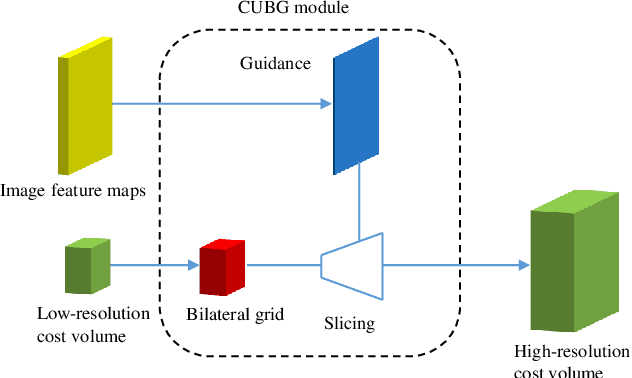
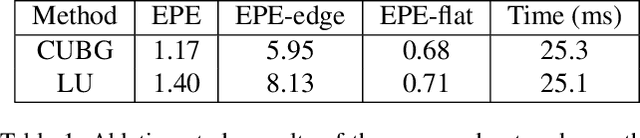
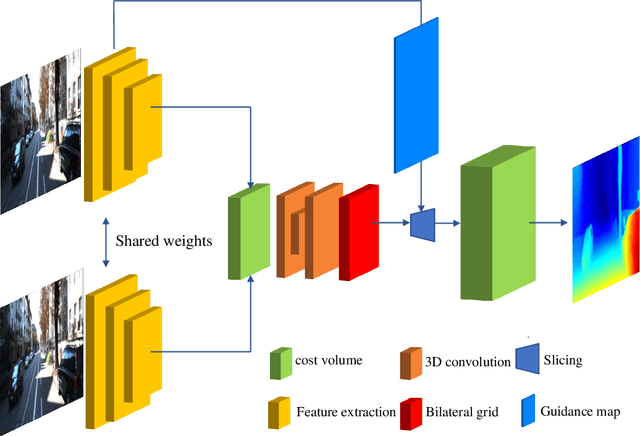
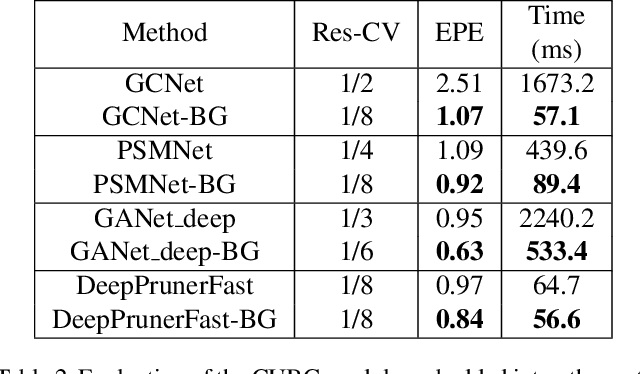
The real-time performance of the stereo matching network is important for many applications, such as automatic driving, robot navigation and augmented reality (AR). Although significant progress has been made in stereo matching networks in recent years, it is still challenging to balance real-time performance and accuracy. In this paper, we present a novel edge-preserving cost volume upsampling module based on the slicing operation in the learned bilateral grid. The slicing layer is parameter-free, which allows us to obtain a high quality cost volume of high resolution from a low resolution cost volume under the guide of the learned guidance map efficiently. The proposed cost volume upsampling module can be seamlessly embedded into many existing stereo matching networks, such as GCNet, PSMNet, and GANet. The resulting networks are accelerated several times while maintaining comparable accuracy. Furthermore, based on this module we design a real-time network (named BGNet), which outperforms the existing published real-time deep stereo matching networks, as well as some complex networks on KITTI stereo datasets. The code of the proposed method will be available.
Cognitive Internet of Things: A New Paradigm beyond Connection
Mar 11, 2014
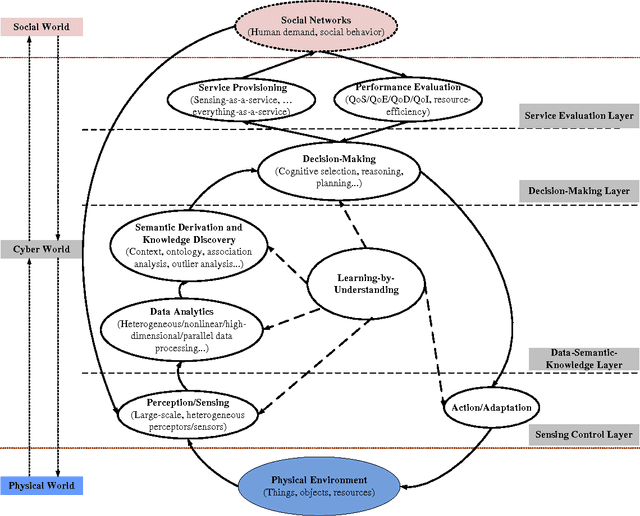
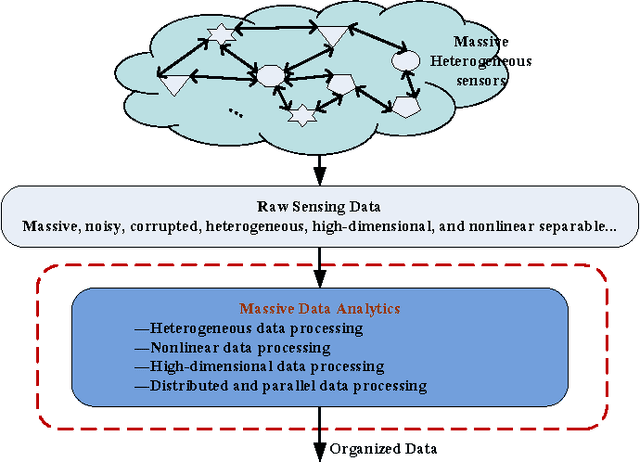
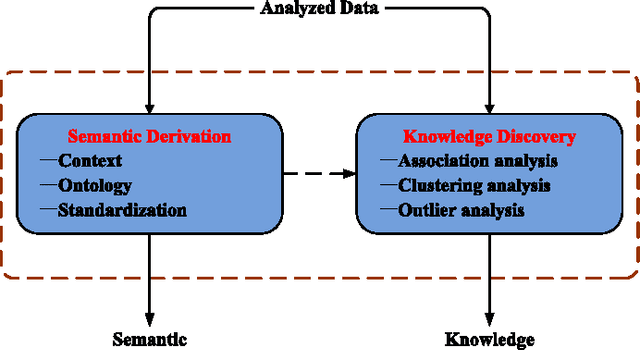
Current research on Internet of Things (IoT) mainly focuses on how to enable general objects to see, hear, and smell the physical world for themselves, and make them connected to share the observations. In this paper, we argue that only connected is not enough, beyond that, general objects should have the capability to learn, think, and understand both physical and social worlds by themselves. This practical need impels us to develop a new paradigm, named Cognitive Internet of Things (CIoT), to empower the current IoT with a `brain' for high-level intelligence. Specifically, we first present a comprehensive definition for CIoT, primarily inspired by the effectiveness of human cognition. Then, we propose an operational framework of CIoT, which mainly characterizes the interactions among five fundamental cognitive tasks: perception-action cycle, massive data analytics, semantic derivation and knowledge discovery, intelligent decision-making, and on-demand service provisioning. Furthermore, we provide a systematic tutorial on key enabling techniques involved in the cognitive tasks. In addition, we also discuss the design of proper performance metrics on evaluating the enabling techniques. Last but not least, we present the research challenges and open issues ahead. Building on the present work and potentially fruitful future studies, CIoT has the capability to bridge the physical world (with objects, resources, etc.) and the social world (with human demand, social behavior, etc.), and enhance smart resource allocation, automatic network operation, and intelligent service provisioning.