 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Generative Foundation Model for Chest Radiography
Sep 04, 2025The scarcity of well-annotated diverse medical images is a major hurdle for developing reliable AI models in healthcare. Substantial technical advances have been made in generative foundation models for natural images. Here we develop `ChexGen', a generative vision-language foundation model that introduces a unified framework for text-, mask-, and bounding box-guided synthesis of chest radiographs. Built upon the latent diffusion transformer architecture, ChexGen was pretrained on the largest curated chest X-ray dataset to date, consisting of 960,000 radiograph-report pairs. ChexGen achieves accurate synthesis of radiographs through expert evaluations and quantitative metrics. We demonstrate the utility of ChexGen for training data augmentation and supervised pretraining, which led to performance improvements across disease classification, detection, and segmentation tasks using a small fraction of training data. Further, our model enables the creation of diverse patient cohorts that enhance model fairness by detecting and mitigating demographic biases. Our study supports the transformative role of generative foundation models in building more accurate, data-efficient, and equitable medical AI systems.
ReXrank: A Public Leaderboard for AI-Powered Radiology Report Generation
Nov 22, 2024



AI-driven models have demonstrated significant potential in automating radiology report generation for chest X-rays. However, there is no standardized benchmark for objectively evaluating their performance. To address this, we present ReXrank, https://rexrank.ai, a public leaderboard and challenge for assessing AI-powered radiology report generation. Our framework incorporates ReXGradient, the largest test dataset consisting of 10,000 studies, and three public datasets (MIMIC-CXR, IU-Xray, CheXpert Plus) for report generation assessment. ReXrank employs 8 evaluation metrics and separately assesses models capable of generating only findings sections and those providing both findings and impressions sections. By providing this standardized evaluation framework, ReXrank enables meaningful comparisons of model performance and offers crucial insights into their robustness across diverse clinical settings. Beyond its current focus on chest X-rays, ReXrank's framework sets the stage for comprehensive evaluation of automated reporting across the full spectrum of medical imaging.
LymphoML: An interpretable artificial intelligence-based method identifies morphologic features that correlate with lymphoma subtype
Nov 20, 2023



The accurate classification of lymphoma subtypes using hematoxylin and eosin (H&E)-stained tissue is complicated by the wide range of morphological features these cancers can exhibit. We present LymphoML - an interpretable machine learning method that identifies morphologic features that correlate with lymphoma subtypes. Our method applies steps to process H&E-stained tissue microarray cores, segment nuclei and cells, compute features encompassing morphology, texture, and architecture, and train gradient-boosted models to make diagnostic predictions. LymphoML's interpretable models, developed on a limited volume of H&E-stained tissue, achieve non-inferior diagnostic accuracy to pathologists using whole-slide images and outperform black box deep-learning on a dataset of 670 cases from Guatemala spanning 8 lymphoma subtypes. Using SHapley Additive exPlanation (SHAP) analysis, we assess the impact of each feature on model prediction and find that nuclear shape features are most discriminative for DLBCL (F1-score: 78.7%) and classical Hodgkin lymphoma (F1-score: 74.5%). Finally, we provide the first demonstration that a model combining features from H&E-stained tissue with features from a standardized panel of 6 immunostains results in a similar diagnostic accuracy (85.3%) to a 46-stain panel (86.1%).
Depth Estimation by Combining Binocular Stereo and Monocular Structured-Light
Mar 20, 2022
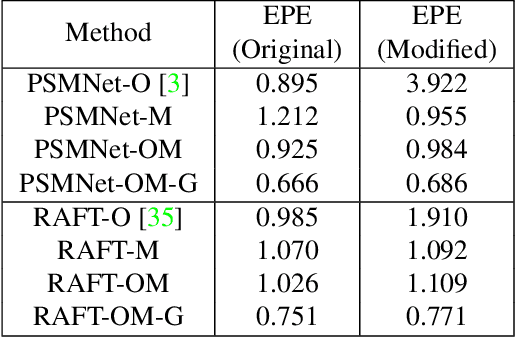
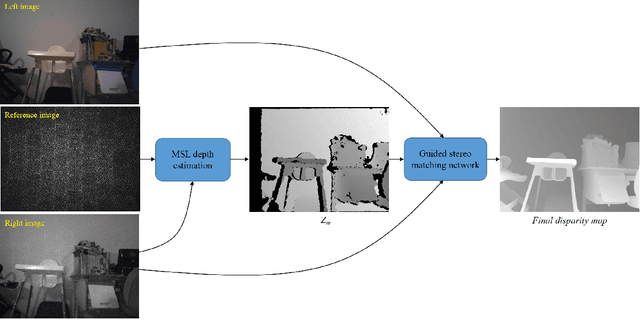
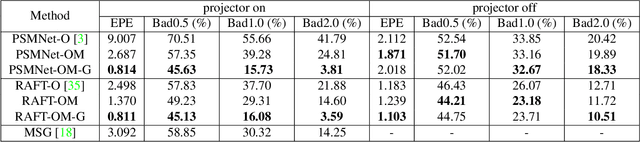
It is well known that the passive stereo system cannot adapt well to weak texture objects, e.g., white walls. However, these weak texture targets are very common in indoor environments. In this paper, we present a novel stereo system, which consists of two cameras (an RGB camera and an IR camera) and an IR speckle projector. The RGB camera is used both for depth estimation and texture acquisition. The IR camera and the speckle projector can form a monocular structured-light (MSL) subsystem, while the two cameras can form a binocular stereo subsystem. The depth map generated by the MSL subsystem can provide external guidance for the stereo matching networks, which can improve the matching accuracy significantly. In order to verify the effectiveness of the proposed system, we build a prototype and collect a test dataset in indoor scenes. The evaluation results show that the Bad 2.0 error of the proposed system is 28.2% of the passive stereo system when the network RAFT is used. The dataset and trained models are available at https://github.com/YuhuaXu/MonoStereoFusion.
Bilateral Grid Learning for Stereo Matching Network
Jan 01, 2021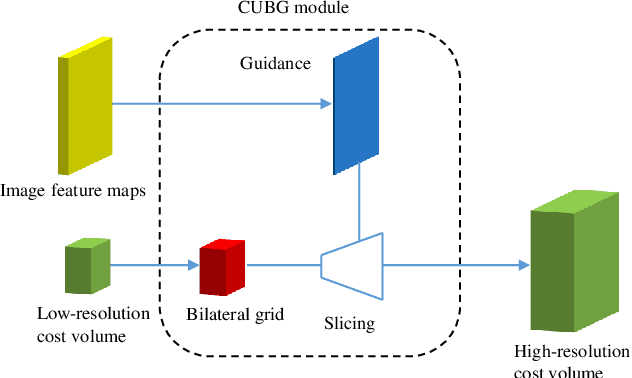
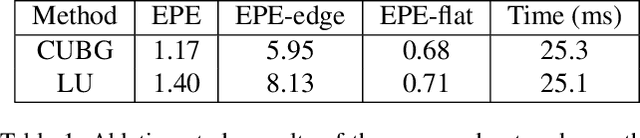
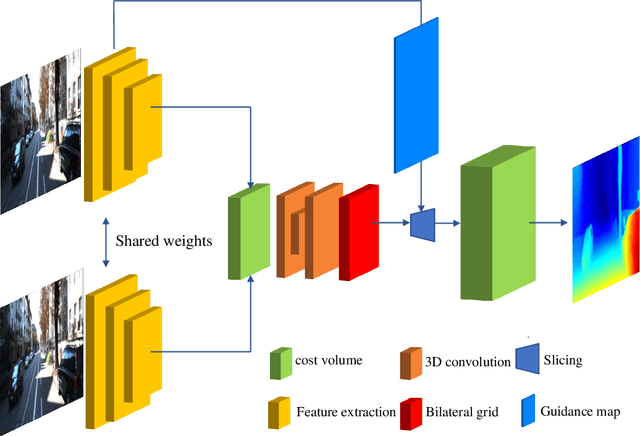
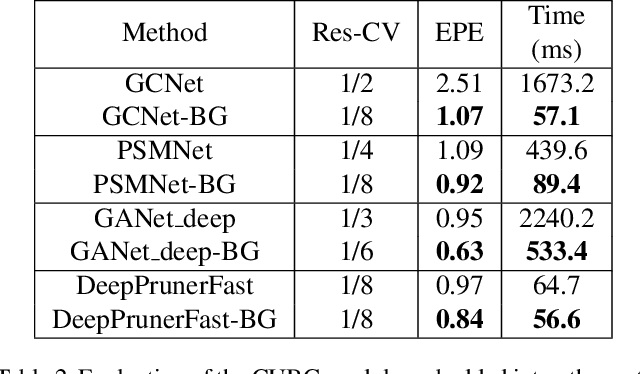
The real-time performance of the stereo matching network is important for many applications, such as automatic driving, robot navigation and augmented reality (AR). Although significant progress has been made in stereo matching networks in recent years, it is still challenging to balance real-time performance and accuracy. In this paper, we present a novel edge-preserving cost volume upsampling module based on the slicing operation in the learned bilateral grid. The slicing layer is parameter-free, which allows us to obtain a high quality cost volume of high resolution from a low resolution cost volume under the guide of the learned guidance map efficiently. The proposed cost volume upsampling module can be seamlessly embedded into many existing stereo matching networks, such as GCNet, PSMNet, and GANet. The resulting networks are accelerated several times while maintaining comparable accuracy. Furthermore, based on this module we design a real-time network (named BGNet), which outperforms the existing published real-time deep stereo matching networks, as well as some complex networks on KITTI stereo datasets. The code of the proposed method will be available.