 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBilateral Grid Learning for Stereo Matching Network
Paper and Code
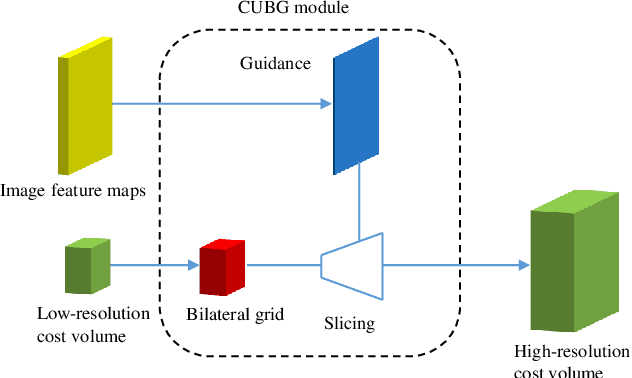
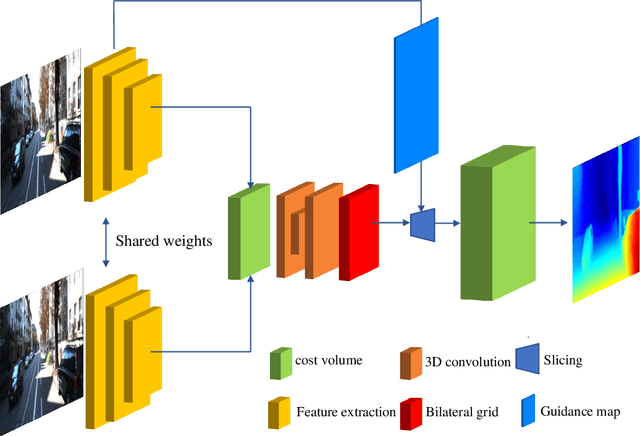
The real-time performance of the stereo matching network is important for many applications, such as automatic driving, robot navigation and augmented reality (AR). Although significant progress has been made in stereo matching networks in recent years, it is still challenging to balance real-time performance and accuracy. In this paper, we present a novel edge-preserving cost volume upsampling module based on the slicing operation in the learned bilateral grid. The slicing layer is parameter-free, which allows us to obtain a high quality cost volume of high resolution from a low resolution cost volume under the guide of the learned guidance map efficiently. The proposed cost volume upsampling module can be seamlessly embedded into many existing stereo matching networks, such as GCNet, PSMNet, and GANet. The resulting networks are accelerated several times while maintaining comparable accuracy. Furthermore, based on this module we design a real-time network (named BGNet), which outperforms the existing published real-time deep stereo matching networks, as well as some complex networks on KITTI stereo datasets. The code of the proposed method will be available.