 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable High-Recall Constraint-Satisfaction-Based Information Retrieval for Clinical Trials Matching
Apr 10, 2026Clinical trials are central to evidence-based medicine, yet many struggle to meet enrollment targets, despite the availability of over half a million trials listed on ClinicalTrials.gov, which attracts approximately two million users monthly. Existing retrieval techniques, largely based on keyword and embedding-similarity matching between patient profiles and eligibility criteria, often struggle with low recall, low precision, and limited interpretability due to complex constraints. We propose SatIR, a scalable clinical trial retrieval method based on constraint satisfaction, enabling high-precision and interpretable matching of patients to relevant trials. Our approach uses formal methods -- Satisfiability Modulo Theories (SMT) and relational algebra -- to efficiently represent and match key constraints from clinical trials and patient records. Beyond leveraging established medical ontologies and conceptual models, we use Large Language Models (LLMs) to convert informal reasoning regarding ambiguity, implicit clinical assumptions, and incomplete patient records into explicit, precise, controllable, and interpretable formal constraints. Evaluated on 59 patients and 3,621 trials, SatIR outperforms TrialGPT on all three evaluated retrieval objectives. It retrieves 32%-72% more relevant-and-eligible trials per patient, improves recall over the union of useful trials by 22-38 points, and serves more patients with at least one useful trial. Retrieval is fast, requiring 2.95 seconds per patient over 3,621 trials. These results show that SatIR is scalable, effective, and interpretable.
Mosaic: Data-Free Knowledge Distillation via Mixture-of-Experts for Heterogeneous Distributed Environments
May 26, 2025



Federated Learning (FL) is a decentralized machine learning paradigm that enables clients to collaboratively train models while preserving data privacy. However, the coexistence of model and data heterogeneity gives rise to inconsistent representations and divergent optimization dynamics across clients, ultimately hindering robust global performance. To transcend these challenges, we propose Mosaic, a novel data-free knowledge distillation framework tailored for heterogeneous distributed environments. Mosaic first trains local generative models to approximate each client's personalized distribution, enabling synthetic data generation that safeguards privacy through strict separation from real data. Subsequently, Mosaic forms a Mixture-of-Experts (MoE) from client models based on their specialized knowledge, and distills it into a global model using the generated data. To further enhance the MoE architecture, Mosaic integrates expert predictions via a lightweight meta model trained on a few representative prototypes. Extensive experiments on standard image classification benchmarks demonstrate that Mosaic consistently outperforms state-of-the-art approaches under both model and data heterogeneity. The source code has been published at https://github.com/Wings-Of-Disaster/Mosaic.
FedRecon: Missing Modality Reconstruction in Distributed Heterogeneous Environments
Apr 14, 2025



Multimodal data are often incomplete and exhibit Non-Independent and Identically Distributed (Non-IID) characteristics in real-world scenarios. These inherent limitations lead to both modality heterogeneity through partial modality absence and data heterogeneity from distribution divergence, creating fundamental challenges for effective federated learning (FL). To address these coupled challenges, we propose FedRecon, the first method targeting simultaneous missing modality reconstruction and Non-IID adaptation in multimodal FL. Our approach first employs a lightweight Multimodal Variational Autoencoder (MVAE) to reconstruct missing modalities while preserving cross-modal consistency. Distinct from conventional imputation methods, we achieve sample-level alignment through a novel distribution mapping mechanism that guarantees both data consistency and completeness. Additionally, we introduce a strategy employing global generator freezing to prevent catastrophic forgetting, which in turn mitigates Non-IID fluctuations. Extensive evaluations on multimodal datasets demonstrate FedRecon's superior performance in modality reconstruction under Non-IID conditions, surpassing state-of-the-art methods.
ATNPA: A Unified View of Oversmoothing Alleviation in Graph Neural Networks
May 02, 2024Oversmoothing is a commonly observed challenge in graph neural network (GNN) learning, where, as layers increase, embedding features learned from GNNs quickly become similar/indistinguishable, making them incapable of differentiating network proximity. A GNN with shallow layer architectures can only learn short-term relation or localized structure information, limiting its power of learning long-term connection, evidenced by their inferior learning performance on heterophilous graphs. Tackling oversmoothing is crucial to harness deep-layer architectures for GNNs. To date, many methods have been proposed to alleviate oversmoothing. The vast difference behind their design principles, combined with graph complications, make it difficult to understand and even compare their difference in tackling the oversmoothing. In this paper, we propose ATNPA, a unified view with five key steps: Augmentation, Transformation, Normalization, Propagation, and Aggregation, to summarize GNN oversmoothing alleviation approaches. We first outline three themes to tackle oversmoothing, and then separate all methods into six categories, followed by detailed reviews of representative methods, including their relation to the ATNPA, and discussion about their niche, strength, and weakness. The review not only draws in-depth understanding of existing methods in the field, but also shows a clear road map for future study.
Information-driven Path Planning for Hybrid Aerial Underwater Vehicles
Apr 08, 2022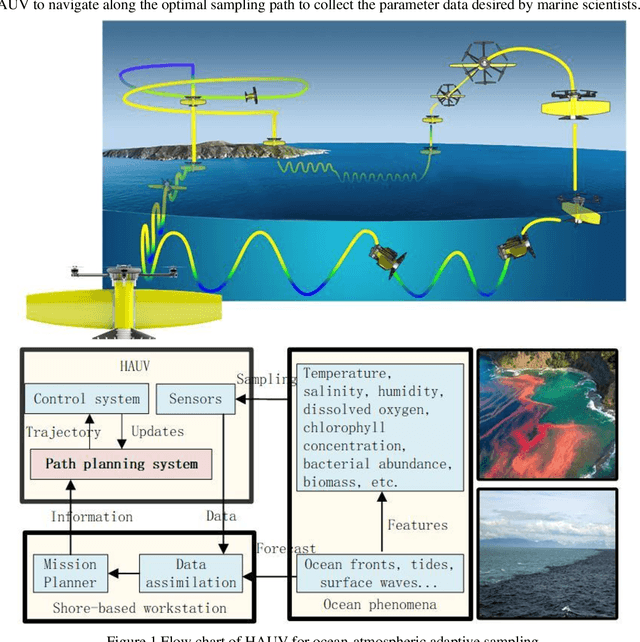
This paper presents a novel Rapidly-exploring Adaptive Sampling Tree (RAST) algorithm for the adaptive sampling mission of a hybrid aerial underwater vehicle (HAUV) in an air-sea 3D environment. This algorithm innovatively combines the tournament-based point selection sampling strategy, the information heuristic search process and the framework of Rapidly-exploring Random Tree (RRT) algorithm. Hence can guide the vehicle to the region of interest to scientists for sampling and generate a collision-free path for maximizing information collection by the HAUV under the constraints of environmental effects of currents or wind and limited budget. The simulation results show that the fast search adaptive sampling tree algorithm has higher optimization performance, faster solution speed and better stability than the Rapidly-exploring Information Gathering Tree (RIGT) algorithm and the particle swarm optimization (PSO) algorithm.
ASVRG: Accelerated Proximal SVRG
Oct 07, 2018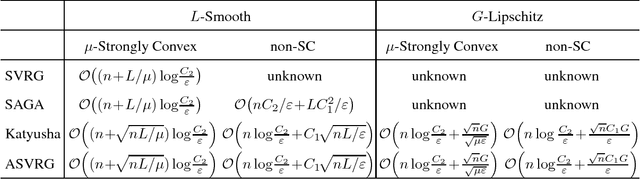

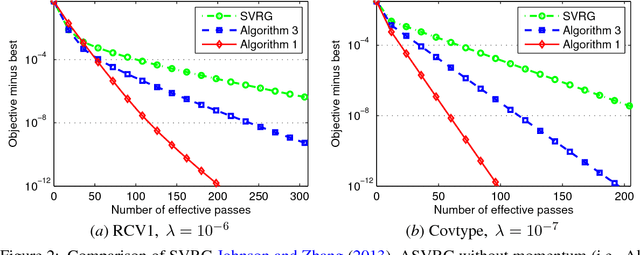
This paper proposes an accelerated proximal stochastic variance reduced gradient (ASVRG) method, in which we design a simple and effective momentum acceleration trick. Unlike most existing accelerated stochastic variance reduction methods such as Katyusha, ASVRG has only one additional variable and one momentum parameter. Thus, ASVRG is much simpler than those methods, and has much lower per-iteration complexity. We prove that ASVRG achieves the best known oracle complexities for both strongly convex and non-strongly convex objectives. In addition, we extend ASVRG to mini-batch and non-smooth settings. We also empirically verify our theoretical results and show that the performance of ASVRG is comparable with, and sometimes even better than that of the state-of-the-art stochastic methods.