 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConvBKI: Real-Time Probabilistic Semantic Mapping Network with Quantifiable Uncertainty
Oct 26, 2023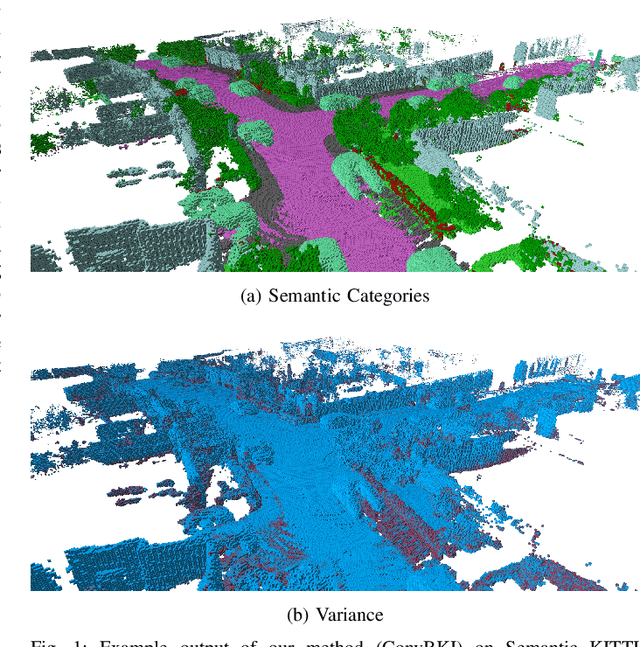

In this paper, we develop a modular neural network for real-time semantic mapping in uncertain environments, which explicitly updates per-voxel probabilistic distributions within a neural network layer. Our approach combines the reliability of classical probabilistic algorithms with the performance and efficiency of modern neural networks. Although robotic perception is often divided between modern differentiable methods and classical explicit methods, a union of both is necessary for real-time and trustworthy performance. We introduce a novel Convolutional Bayesian Kernel Inference (ConvBKI) layer which incorporates semantic segmentation predictions online into a 3D map through a depthwise convolution layer by leveraging conjugate priors. We compare ConvBKI against state-of-the-art deep learning approaches and probabilistic algorithms for mapping to evaluate reliability and performance. We also create a Robot Operating System (ROS) package of ConvBKI and test it on real-world perceptually challenging off-road driving data.
Convolutional Bayesian Kernel Inference for 3D Semantic Mapping
Sep 21, 2022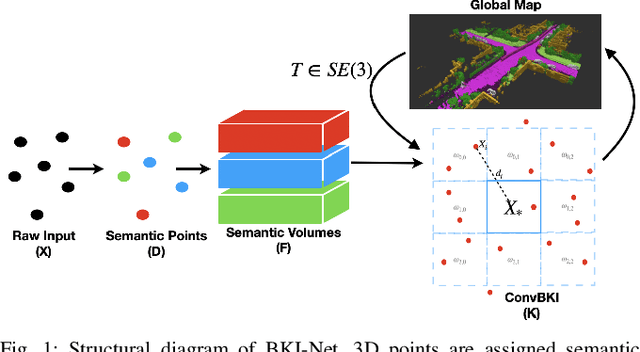
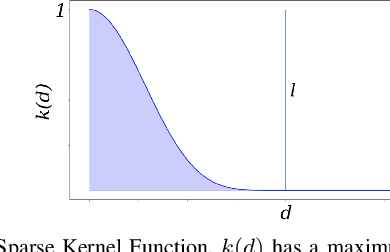
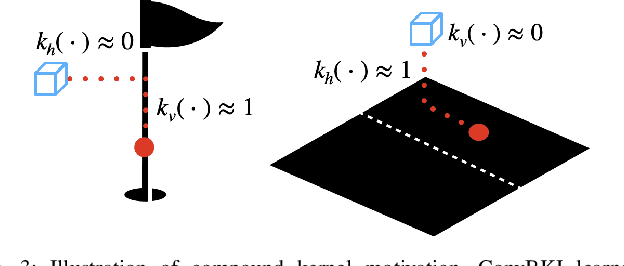
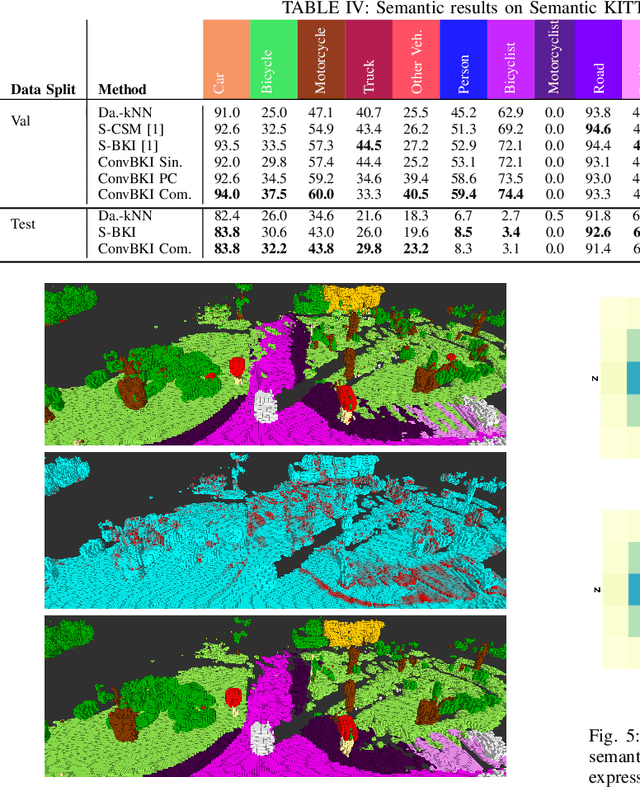
Robotic perception is currently at a cross-roads between modern methods which operate in an efficient latent space, and classical methods which are mathematically founded and provide interpretable, trustworthy results. In this paper, we introduce a Convolutional Bayesian Kernel Inference (ConvBKI) layer which explicitly performs Bayesian inference within a depthwise separable convolution layer to simultaneously maximize efficiency while maintaining reliability. We apply our layer to the task of 3D semantic mapping, where we learn semantic-geometric probability distributions for LiDAR sensor information in real time. We evaluate our network against state-of-the-art semantic mapping algorithms on the KITTI data set, and demonstrate improved latency with comparable semantic results.
MotionSC: Data Set and Network for Real-Time Semantic Mapping in Dynamic Environments
Mar 14, 2022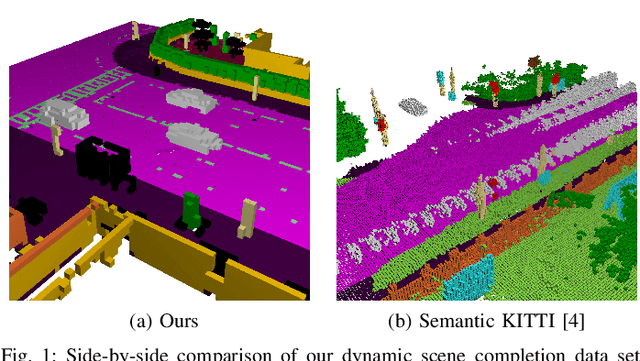
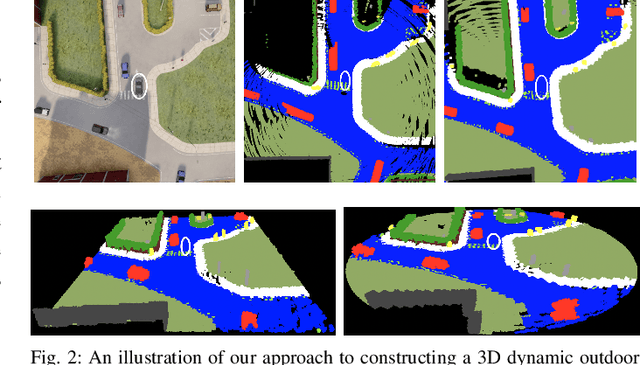
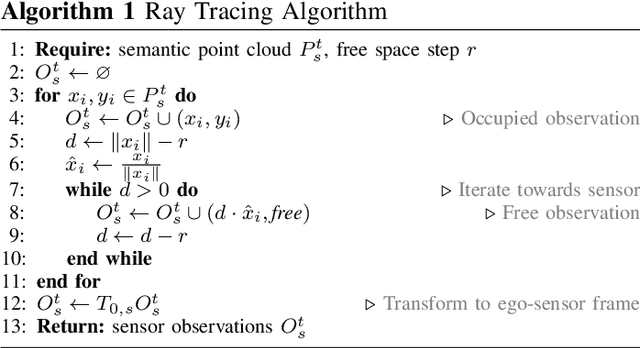
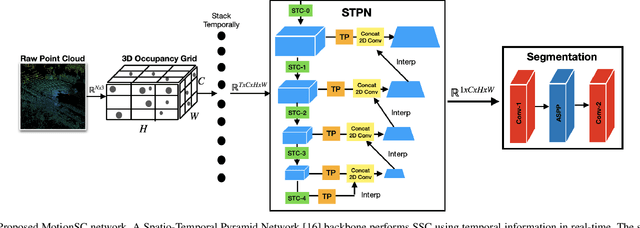
This work addresses a gap in semantic scene completion (SSC) data by creating a novel outdoor data set with accurate and complete dynamic scenes. Our data set is formed from randomly sampled views of the world at each time step, which supervises generalizability to complete scenes without occlusions or traces. We create SSC baselines from state-of-the-art open source networks and construct a benchmark real-time dense local semantic mapping algorithm, MotionSC, by leveraging recent 3D deep learning architectures to enhance SSC with temporal information. Our network shows that the proposed data set can quantify and supervise accurate scene completion in the presence of dynamic objects, which can lead to the development of improved dynamic mapping algorithms. All software is available at https://github.com/UMich-CURLY/3DMapping.
Mobile 3D Printing Robot Simulation with Viscoelastic Fluids
Oct 08, 2021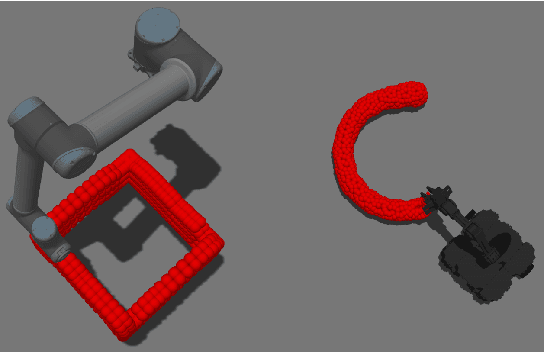
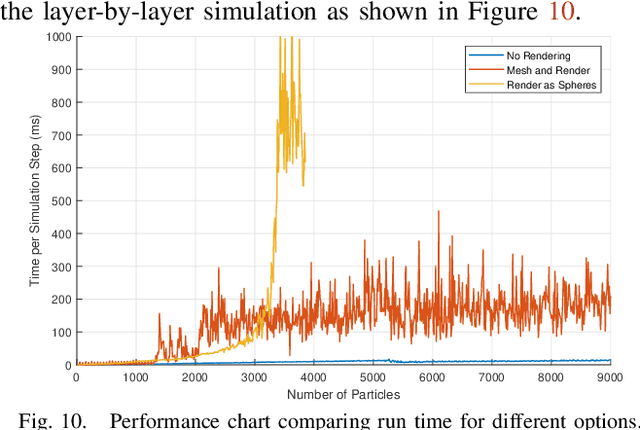
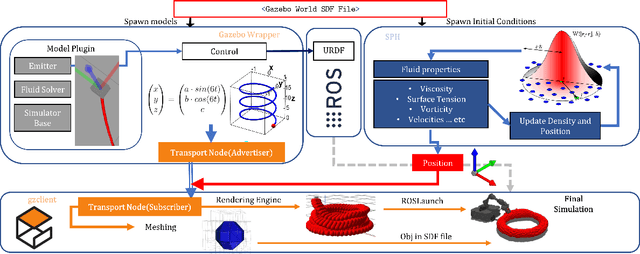
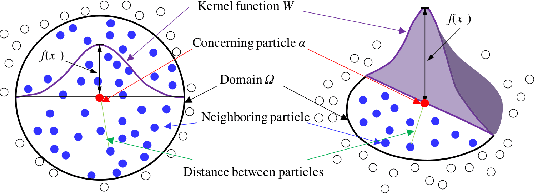
The system design and algorithm development of mobile 3D printing robots need a realistic simulation. They require a mobile robot simulation platform to interoperate with a physics-based material simulation for handling interactions between the time-variant deformable 3D printing materials and other simulated rigid bodies in the environment, which is not available for roboticists yet. To bridge this gap and enable the real-time simulation of mobile 3D printing processes, we develop a simulation framework that includes particle-based viscoelastic fluid simulation and particle-to-mesh conversion in the widely adopted Gazebo robotics simulator, avoiding the bottlenecks of traditional additive manufacturing simulation approaches. This framework is the first of its kind that enables the simulation of robot arms or mobile manipulators together with viscoelastic fluids. The method is tested using various material properties and multiple collaborating robots to demonstrate its simulation ability for the robots to plan and control the printhead trajectories and to visually sense at the same time the printed fluid materials as a free-form mesh. The scalability as a function of available material particles in the simulation was also studied. A simulation with an average of 5 FPS was achieved on a regular desktop computer.