 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMobile 3D Printing Robot Simulation with Viscoelastic Fluids
Oct 08, 2021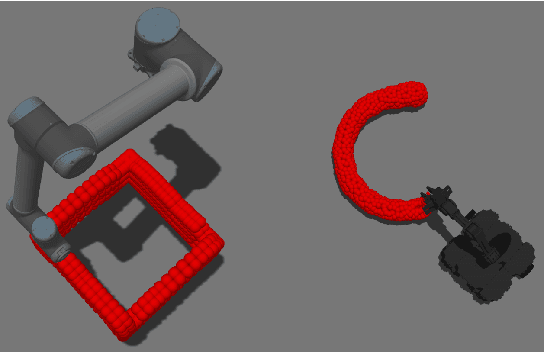
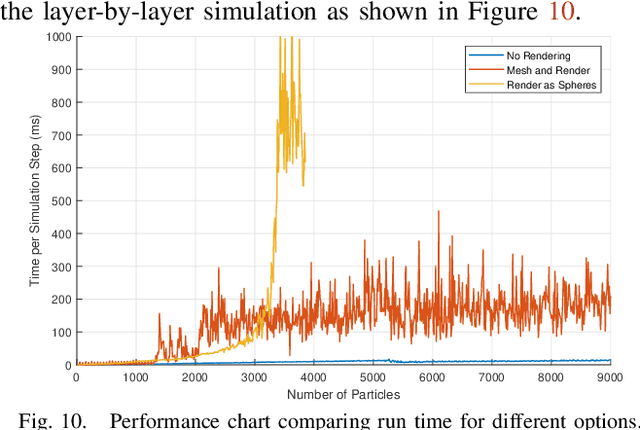
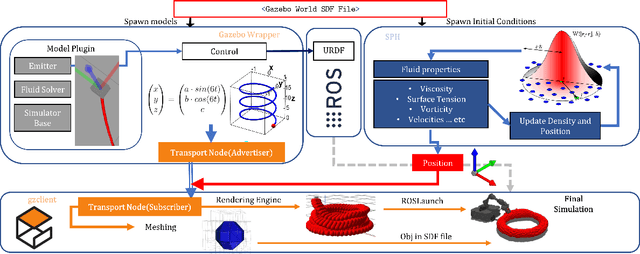
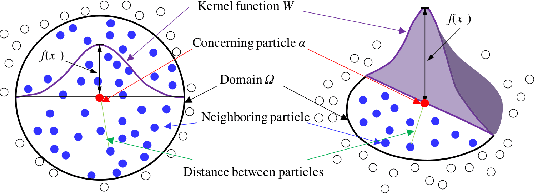
The system design and algorithm development of mobile 3D printing robots need a realistic simulation. They require a mobile robot simulation platform to interoperate with a physics-based material simulation for handling interactions between the time-variant deformable 3D printing materials and other simulated rigid bodies in the environment, which is not available for roboticists yet. To bridge this gap and enable the real-time simulation of mobile 3D printing processes, we develop a simulation framework that includes particle-based viscoelastic fluid simulation and particle-to-mesh conversion in the widely adopted Gazebo robotics simulator, avoiding the bottlenecks of traditional additive manufacturing simulation approaches. This framework is the first of its kind that enables the simulation of robot arms or mobile manipulators together with viscoelastic fluids. The method is tested using various material properties and multiple collaborating robots to demonstrate its simulation ability for the robots to plan and control the printhead trajectories and to visually sense at the same time the printed fluid materials as a free-form mesh. The scalability as a function of available material particles in the simulation was also studied. A simulation with an average of 5 FPS was achieved on a regular desktop computer.
A Spiking Central Pattern Generator for the control of a simulated lamprey robot running on SpiNNaker and Loihi neuromorphic boards
Jan 18, 2021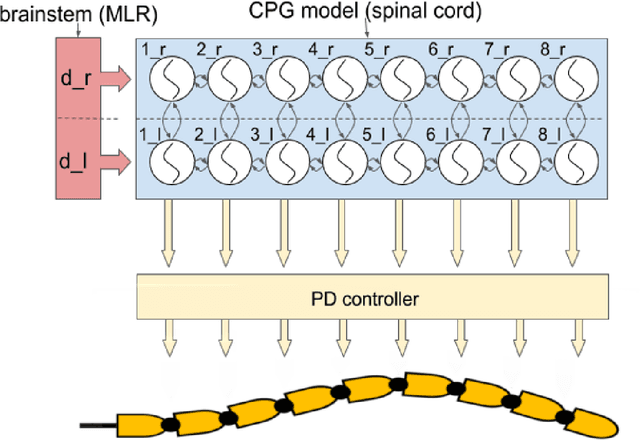
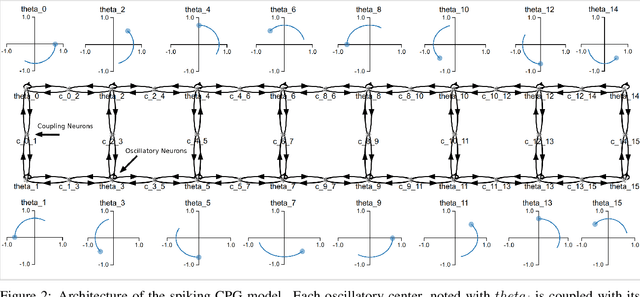
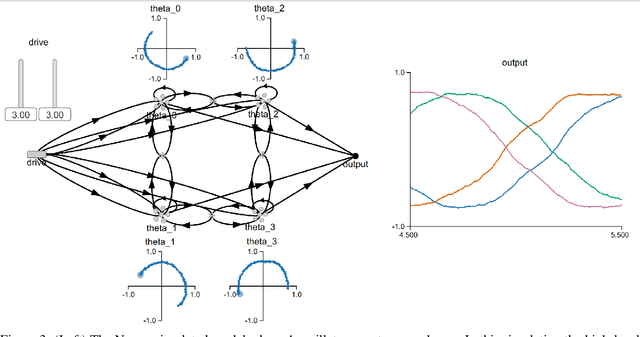
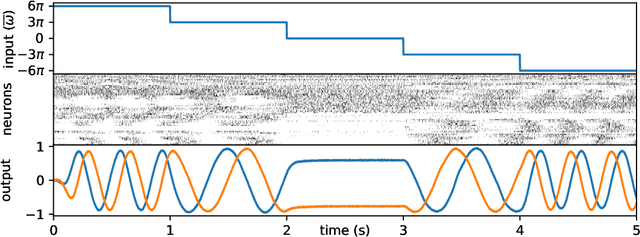
Central Pattern Generators (CPGs) models have been long used to investigate both the neural mechanisms that underlie animal locomotion as well as a tool for robotic research. In this work we propose a spiking CPG neural network and its implementation on neuromorphic hardware as a means to control a simulated lamprey model. To construct our CPG model, we employ the naturally emerging dynamical systems that arise through the use of recurrent neural populations in the Neural Engineering Framework (NEF). We define the mathematical formulation behind our model, which consists of a system of coupled abstract oscillators modulated by high-level signals, capable of producing a variety of output gaits. We show that with this mathematical formulation of the Central Pattern Generator model, the model can be turned into a Spiking Neural Network (SNN) that can be easily simulated with Nengo, an SNN simulator. The spiking CPG model is then used to produce the swimming gaits of a simulated lamprey robot model in various scenarios. We show that by modifying the input to the network, which can be provided by sensory information, the robot can be controlled dynamically in direction and pace. The proposed methodology can be generalized to other types of CPGs suitable for both engineering applications and scientific research. We test our system on two neuromorphic platforms, SpiNNaker and Loihi. Finally, we show that this category of spiking algorithms shows a promising potential to exploit the theoretical advantages of neuromorphic hardware in terms of energy efficiency and computational speed.