 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToLL: Topological Layout Learning with Structural Multi-view Augmentation for 3D Scene Graph Pretraining
Mar 30, 20263D Scene Graph (3DSG) generation plays a pivotal role in spatial understanding and semantic-affordance perception. However, its generalizability is often constrained by data scarcity. Current solutions primarily focus on cross-modal assisted representation learning and object-centric generation pre-training. The former relies heavily on predicate annotations, while the latter's predicate learning may be bypassed due to strong object priors. Consequently, they could not often provide a label-free and robust self-supervised proxy task for 3DSG fine-tuning. To bridge this gap, we propose a Topological Layout Learning (ToLL) for 3DSG pretraining framework. In detail, we design an Anchor-Conditioned Topological Geometry Reasoning, with a GNN to recover the global layout of zero-centered subgraphs by the spatial priors from sparse anchors. This process is strictly modulated by predicate features, thereby enforcing the predicate relation learning. Furthermore, we construct a Structural Multi-view Augmentation to avoid semantic corruption, and enhancing representations via self-distillation. The extensive experiments on 3DSSG dataset demonstrate that our ToLL could improve representation quality, outperforming state-of-the-art baselines.
DivScore: Zero-Shot Detection of LLM-Generated Text in Specialized Domains
Jun 07, 2025Detecting LLM-generated text in specialized and high-stakes domains like medicine and law is crucial for combating misinformation and ensuring authenticity. However, current zero-shot detectors, while effective on general text, often fail when applied to specialized content due to domain shift. We provide a theoretical analysis showing this failure is fundamentally linked to the KL divergence between human, detector, and source text distributions. To address this, we propose DivScore, a zero-shot detection framework using normalized entropy-based scoring and domain knowledge distillation to robustly identify LLM-generated text in specialized domains. We also release a domain-specific benchmark for LLM-generated text detection in the medical and legal domains. Experiments on our benchmark show that DivScore consistently outperforms state-of-the-art detectors, with 14.4% higher AUROC and 64.0% higher recall (0.1% false positive rate threshold). In adversarial settings, DivScore demonstrates superior robustness than other baselines, achieving on average 22.8% advantage in AUROC and 29.5% in recall. Code and data are publicly available.
Test-Time Code-Switching for Cross-lingual Aspect Sentiment Triplet Extraction
Jan 24, 2025Aspect Sentiment Triplet Extraction (ASTE) is a thriving research area with impressive outcomes being achieved on high-resource languages. However, the application of cross-lingual transfer to the ASTE task has been relatively unexplored, and current code-switching methods still suffer from term boundary detection issues and out-of-dictionary problems. In this study, we introduce a novel Test-Time Code-SWitching (TT-CSW) framework, which bridges the gap between the bilingual training phase and the monolingual test-time prediction. During training, a generative model is developed based on bilingual code-switched training data and can produce bilingual ASTE triplets for bilingual inputs. In the testing stage, we employ an alignment-based code-switching technique for test-time augmentation. Extensive experiments on cross-lingual ASTE datasets validate the effectiveness of our proposed method. We achieve an average improvement of 3.7% in terms of weighted-averaged F1 in four datasets with different languages. Additionally, we set a benchmark using ChatGPT and GPT-4, and demonstrate that even smaller generative models fine-tuned with our proposed TT-CSW framework surpass ChatGPT and GPT-4 by 14.2% and 5.0% respectively.
LGU-SLAM: Learnable Gaussian Uncertainty Matching with Deformable Correlation Sampling for Deep Visual SLAM
Oct 30, 2024Deep visual Simultaneous Localization and Mapping (SLAM) techniques, e.g., DROID, have made significant advancements by leveraging deep visual odometry on dense flow fields. In general, they heavily rely on global visual similarity matching. However, the ambiguous similarity interference in uncertain regions could often lead to excessive noise in correspondences, ultimately misleading SLAM in geometric modeling. To address this issue, we propose a Learnable Gaussian Uncertainty (LGU) matching. It mainly focuses on precise correspondence construction. In our scheme, a learnable 2D Gaussian uncertainty model is designed to associate matching-frame pairs. It could generate input-dependent Gaussian distributions for each correspondence map. Additionally, a multi-scale deformable correlation sampling strategy is devised to adaptively fine-tune the sampling of each direction by a priori look-up ranges, enabling reliable correlation construction. Furthermore, a KAN-bias GRU component is adopted to improve a temporal iterative enhancement for accomplishing sophisticated spatio-temporal modeling with limited parameters. The extensive experiments on real-world and synthetic datasets are conducted to validate the effectiveness and superiority of our method.
MoveLight: Enhancing Traffic Signal Control through Movement-Centric Deep Reinforcement Learning
Jul 24, 2024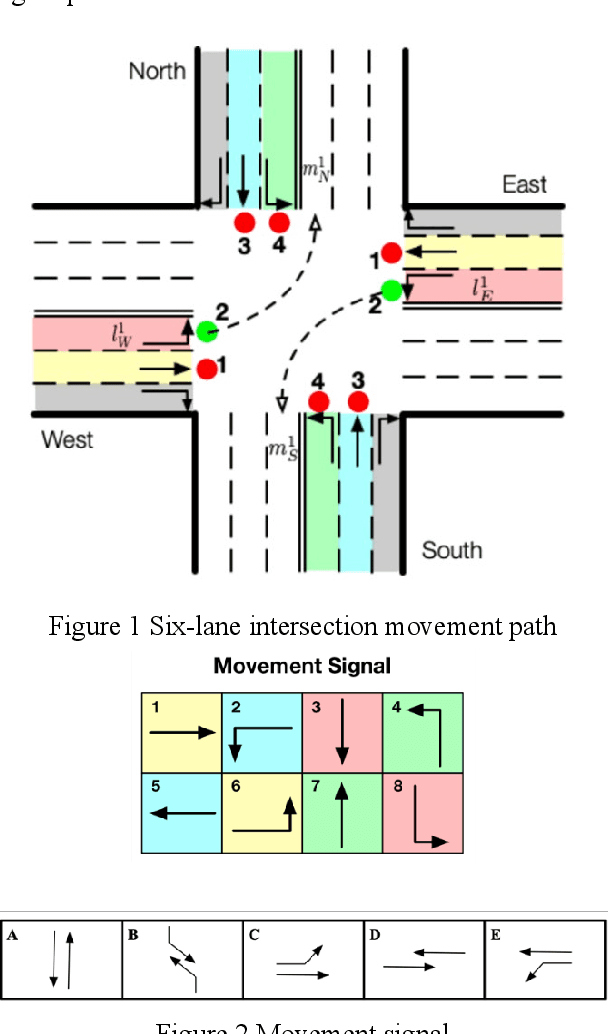
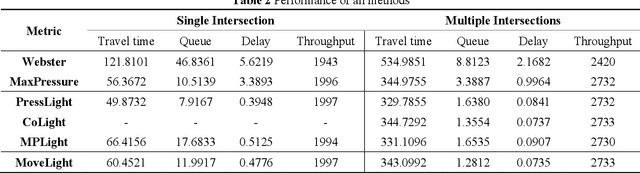
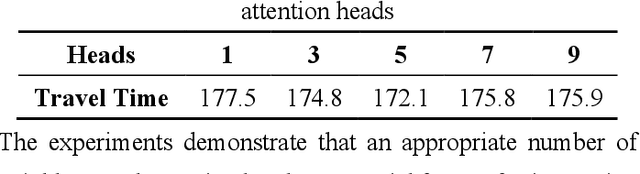
This paper introduces MoveLight, a novel traffic signal control system that enhances urban traffic management through movement-centric deep reinforcement learning. By leveraging detailed real-time data and advanced machine learning techniques, MoveLight overcomes the limitations of traditional traffic signal control methods. It employs a lane-level control approach using the FRAP algorithm to achieve dynamic and adaptive traffic signal control, optimizing traffic flow, reducing congestion, and improving overall efficiency. Our research demonstrates the scalability and effectiveness of MoveLight across single intersections, arterial roads, and network levels. Experimental results using real-world datasets from Cologne and Hangzhou show significant improvements in metrics such as queue length, delay, and throughput compared to existing methods. This study highlights the transformative potential of deep reinforcement learning in intelligent traffic signal control, setting a new standard for sustainable and efficient urban transportation systems.
DASTSiam: Spatio-Temporal Fusion and Discriminative Augmentation for Improved Siamese Tracking
Jan 22, 2023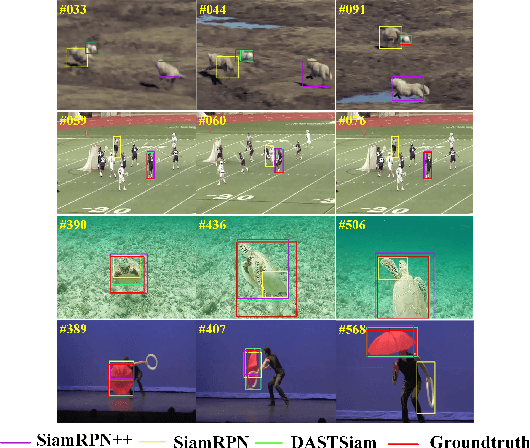

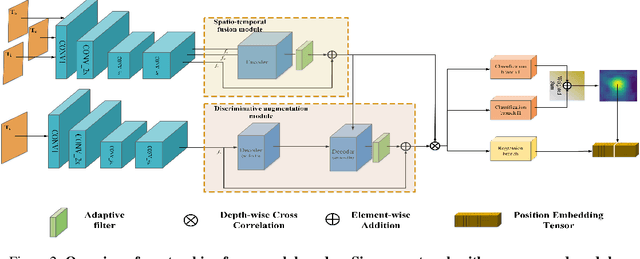
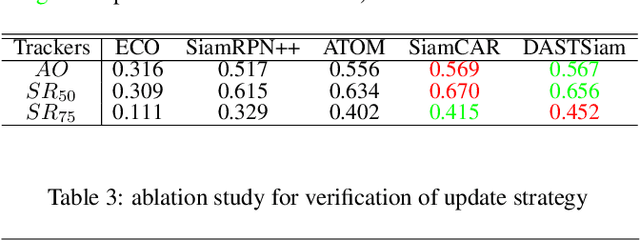
Tracking tasks based on deep neural networks have greatly improved with the emergence of Siamese trackers. However, the appearance of targets often changes during tracking, which can reduce the robustness of the tracker when facing challenges such as aspect ratio change, occlusion, and scale variation. In addition, cluttered backgrounds can lead to multiple high response points in the response map, leading to incorrect target positioning. In this paper, we introduce two transformer-based modules to improve Siamese tracking called DASTSiam: the spatio-temporal (ST) fusion module and the Discriminative Augmentation (DA) module. The ST module uses cross-attention based accumulation of historical cues to improve robustness against object appearance changes, while the DA module associates semantic information between the template and search region to improve target discrimination. Moreover, Modifying the label assignment of anchors also improves the reliability of the object location. Our modules can be used with all Siamese trackers and show improved performance on several public datasets through comparative and ablation experiments.