 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMSACL: Multi-Step Actor-Critic Learning with Lyapunov Certificates for Exponentially Stabilizing Control
Dec 31, 2025Achieving provable stability in model-free reinforcement learning (RL) remains a challenge, particularly in balancing exploration with rigorous safety. This article introduces MSACL, a framework that integrates exponential stability theory with maximum entropy RL through multi-step Lyapunov certificate learning. Unlike methods relying on complex reward engineering, MSACL utilizes off-policy multi-step data to learn Lyapunov certificates satisfying theoretical stability conditions. By introducing Exponential Stability Labels (ESL) and a $λ$-weighted aggregation mechanism, the framework effectively balances the bias-variance trade-off in multi-step learning. Policy optimization is guided by a stability-aware advantage function, ensuring the learned policy promotes rapid Lyapunov descent. We evaluate MSACL across six benchmarks, including stabilization and nonlinear tracking tasks, demonstrating its superiority over state-of-the-art Lyapunov-based RL algorithms. MSACL achieves exponential stability and rapid convergence under simple rewards, while exhibiting significant robustness to uncertainties and generalization to unseen trajectories. Sensitivity analysis establishes the multi-step horizon $n=20$ as a robust default across diverse systems. By linking Lyapunov theory with off-policy actor-critic frameworks, MSACL provides a foundation for verifiably safe learning-based control. Source code and benchmark environments will be made publicly available.
In-depth Analysis of Graph-based RAG in a Unified Framework
Mar 06, 2025Graph-based Retrieval-Augmented Generation (RAG) has proven effective in integrating external knowledge into large language models (LLMs), improving their factual accuracy, adaptability, interpretability, and trustworthiness. A number of graph-based RAG methods have been proposed in the literature. However, these methods have not been systematically and comprehensively compared under the same experimental settings. In this paper, we first summarize a unified framework to incorporate all graph-based RAG methods from a high-level perspective. We then extensively compare representative graph-based RAG methods over a range of questing-answering (QA) datasets -- from specific questions to abstract questions -- and examine the effectiveness of all methods, providing a thorough analysis of graph-based RAG approaches. As a byproduct of our experimental analysis, we are also able to identify new variants of the graph-based RAG methods over specific QA and abstract QA tasks respectively, by combining existing techniques, which outperform the state-of-the-art methods. Finally, based on these findings, we offer promising research opportunities. We believe that a deeper understanding of the behavior of existing methods can provide new valuable insights for future research.
Navigating Robot Swarm Through a Virtual Tube with Flow-Adaptive Distribution Control
Jan 21, 2025With the rapid development of robot swarm technology and its diverse applications, navigating robot swarms through complex environments has emerged as a critical research direction. To ensure safe navigation and avoid potential collisions with obstacles, the concept of virtual tubes has been introduced to define safe and navigable regions. However, current control methods in virtual tubes face the congestion issues, particularly in narrow virtual tubes with low throughput. To address these challenges, we first originally introduce the concepts of virtual tube area and flow capacity, and develop an new evolution model for the spatial density function. Next, we propose a novel control method that combines a modified artificial potential field (APF) for swarm navigation and density feedback control for distribution regulation, under which a saturated velocity command is designed. Then, we generate a global velocity field that not only ensures collision-free navigation through the virtual tube, but also achieves locally input-to-state stability (LISS) for density tracking errors, both of which are rigorously proven. Finally, numerical simulations and realistic applications validate the effectiveness and advantages of the proposed method in managing robot swarms within narrow virtual tubes.
Self-reconfiguration Strategies for Space-distributed Spacecraft
Nov 26, 2024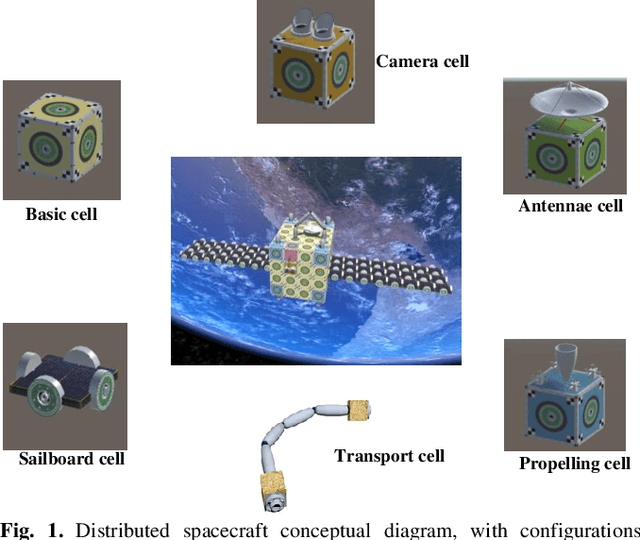
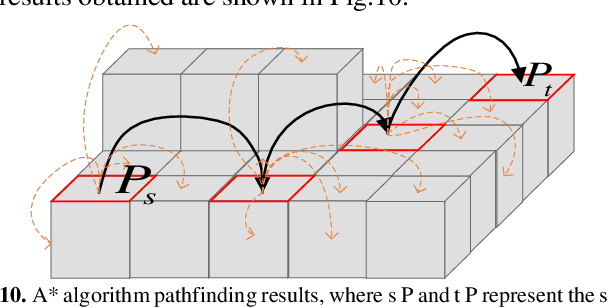
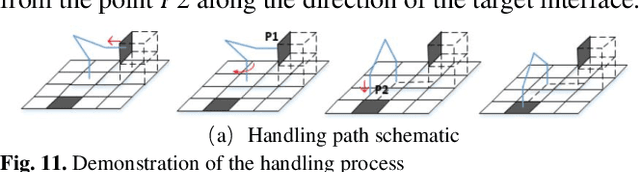
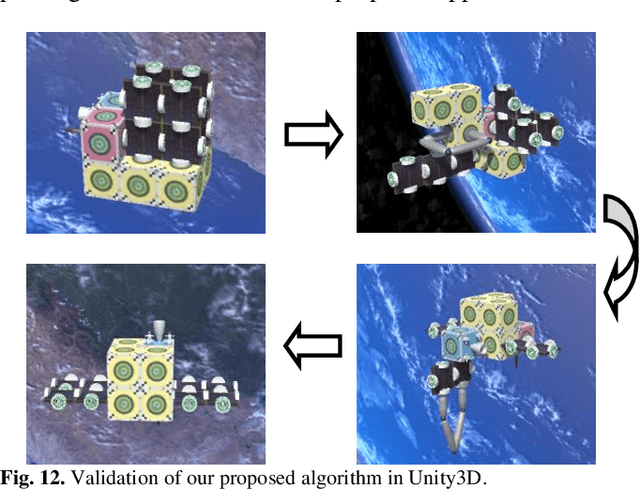
This paper proposes a distributed on-orbit spacecraft assembly algorithm, where future spacecraft can assemble modules with different functions on orbit to form a spacecraft structure with specific functions. This form of spacecraft organization has the advantages of reconfigurability, fast mission response and easy maintenance. Reasonable and efficient on-orbit self-reconfiguration algorithms play a crucial role in realizing the benefits of distributed spacecraft. This paper adopts the framework of imitation learning combined with reinforcement learning for strategy learning of module handling order. A robot arm motion algorithm is then designed to execute the handling sequence. We achieve the self-reconfiguration handling task by creating a map on the surface of the module, completing the path point planning of the robotic arm using A*. The joint planning of the robotic arm is then accomplished through forward and reverse kinematics. Finally, the results are presented in Unity3D.