 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMSACL: Multi-Step Actor-Critic Learning with Lyapunov Certificates for Exponentially Stabilizing Control
Dec 31, 2025Achieving provable stability in model-free reinforcement learning (RL) remains a challenge, particularly in balancing exploration with rigorous safety. This article introduces MSACL, a framework that integrates exponential stability theory with maximum entropy RL through multi-step Lyapunov certificate learning. Unlike methods relying on complex reward engineering, MSACL utilizes off-policy multi-step data to learn Lyapunov certificates satisfying theoretical stability conditions. By introducing Exponential Stability Labels (ESL) and a $λ$-weighted aggregation mechanism, the framework effectively balances the bias-variance trade-off in multi-step learning. Policy optimization is guided by a stability-aware advantage function, ensuring the learned policy promotes rapid Lyapunov descent. We evaluate MSACL across six benchmarks, including stabilization and nonlinear tracking tasks, demonstrating its superiority over state-of-the-art Lyapunov-based RL algorithms. MSACL achieves exponential stability and rapid convergence under simple rewards, while exhibiting significant robustness to uncertainties and generalization to unseen trajectories. Sensitivity analysis establishes the multi-step horizon $n=20$ as a robust default across diverse systems. By linking Lyapunov theory with off-policy actor-critic frameworks, MSACL provides a foundation for verifiably safe learning-based control. Source code and benchmark environments will be made publicly available.
Navigating Robot Swarm Through a Virtual Tube with Flow-Adaptive Distribution Control
Jan 21, 2025With the rapid development of robot swarm technology and its diverse applications, navigating robot swarms through complex environments has emerged as a critical research direction. To ensure safe navigation and avoid potential collisions with obstacles, the concept of virtual tubes has been introduced to define safe and navigable regions. However, current control methods in virtual tubes face the congestion issues, particularly in narrow virtual tubes with low throughput. To address these challenges, we first originally introduce the concepts of virtual tube area and flow capacity, and develop an new evolution model for the spatial density function. Next, we propose a novel control method that combines a modified artificial potential field (APF) for swarm navigation and density feedback control for distribution regulation, under which a saturated velocity command is designed. Then, we generate a global velocity field that not only ensures collision-free navigation through the virtual tube, but also achieves locally input-to-state stability (LISS) for density tracking errors, both of which are rigorously proven. Finally, numerical simulations and realistic applications validate the effectiveness and advantages of the proposed method in managing robot swarms within narrow virtual tubes.
High-Speed Interception Multicopter Control by Image-based Visual Servoing
Apr 12, 2024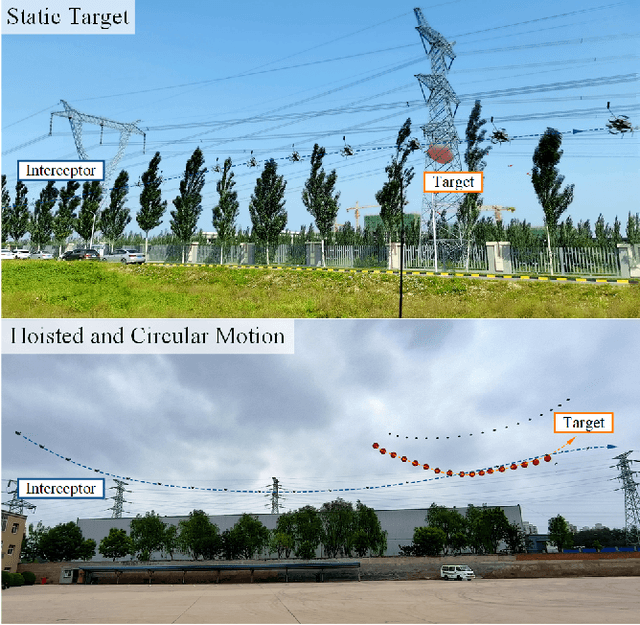
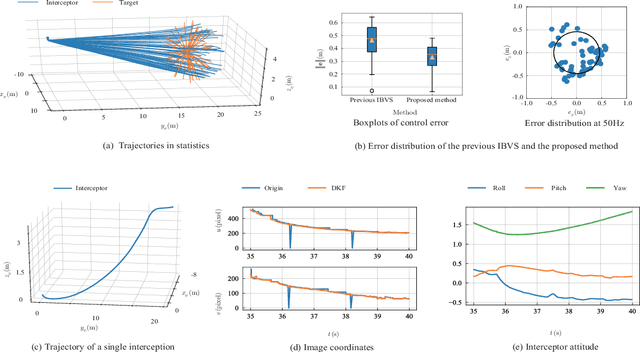
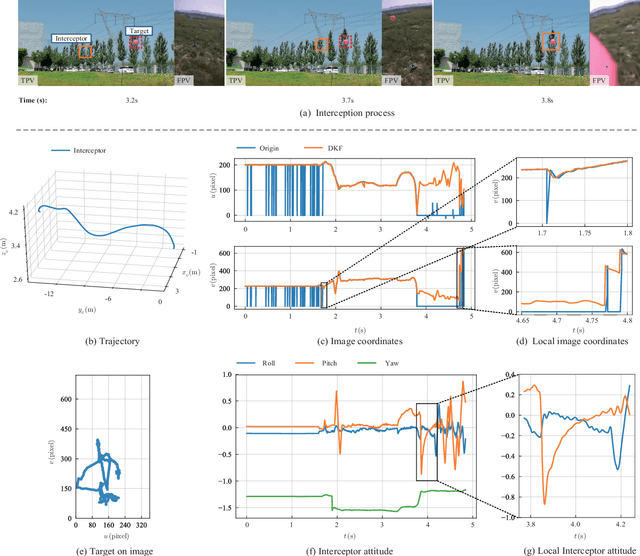
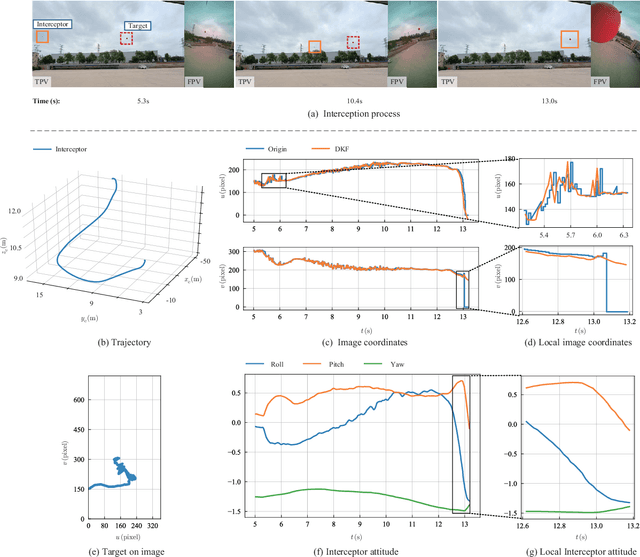
In recent years, reports of illegal drones threatening public safety have increased. For the invasion of fully autonomous drones, traditional methods such as radio frequency interference and GPS shielding may fail. This paper proposes a scheme that uses an autonomous multicopter with a strapdown camera to intercept a maneuvering intruder UAV. The interceptor multicopter can autonomously detect and intercept intruders moving at high speed in the air. The strapdown camera avoids the complex mechanical structure of the electro-optical pod, making the interceptor multicopter compact. However, the coupling of the camera and multicopter motion makes interception tasks difficult. To solve this problem, an Image-Based Visual Servoing (IBVS) controller is proposed to make the interception fast and accurate. Then, in response to the time delay of sensor imaging and image processing relative to attitude changes in high-speed scenarios, a Delayed Kalman Filter (DKF) observer is generalized to predict the current image position and increase the update frequency. Finally, Hardware-in-the-Loop (HITL) simulations and outdoor flight experiments verify that this method has a high interception accuracy and success rate. In the flight experiments, a high-speed interception is achieved with a terminal speed of 20 m/s.