 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-Speed Interception Multicopter Control by Image-based Visual Servoing
Apr 12, 2024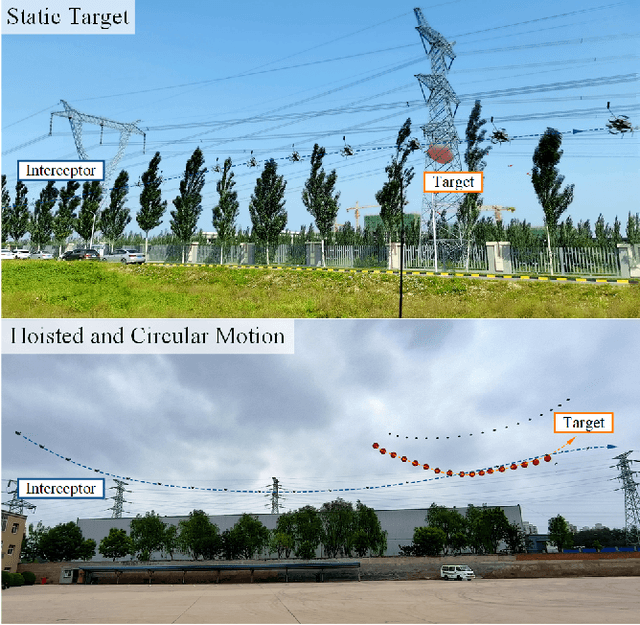
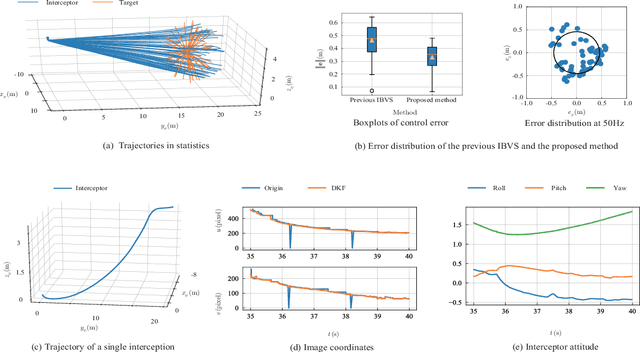
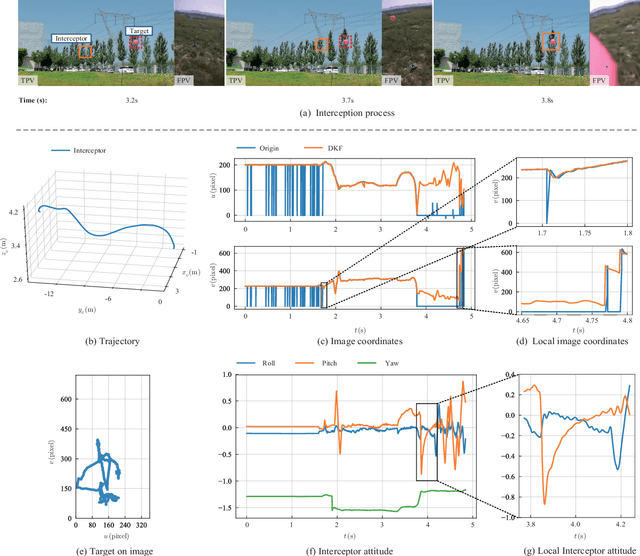
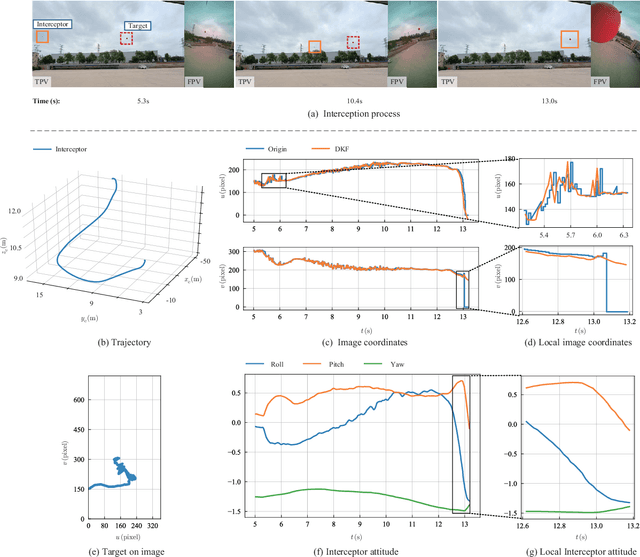
In recent years, reports of illegal drones threatening public safety have increased. For the invasion of fully autonomous drones, traditional methods such as radio frequency interference and GPS shielding may fail. This paper proposes a scheme that uses an autonomous multicopter with a strapdown camera to intercept a maneuvering intruder UAV. The interceptor multicopter can autonomously detect and intercept intruders moving at high speed in the air. The strapdown camera avoids the complex mechanical structure of the electro-optical pod, making the interceptor multicopter compact. However, the coupling of the camera and multicopter motion makes interception tasks difficult. To solve this problem, an Image-Based Visual Servoing (IBVS) controller is proposed to make the interception fast and accurate. Then, in response to the time delay of sensor imaging and image processing relative to attitude changes in high-speed scenarios, a Delayed Kalman Filter (DKF) observer is generalized to predict the current image position and increase the update frequency. Finally, Hardware-in-the-Loop (HITL) simulations and outdoor flight experiments verify that this method has a high interception accuracy and success rate. In the flight experiments, a high-speed interception is achieved with a terminal speed of 20 m/s.
A Survey on Passing-through Control of Multi-Robot Systems in Cluttered Environments
Nov 13, 2023This survey presents a comprehensive review of various methods and algorithms related to passing-through control of multi-robot systems in cluttered environments. Numerous studies have investigated this area, and we identify several avenues for enhancing existing methods. This survey describes some models of robots and commonly considered control objectives, followed by an in-depth analysis of four types of algorithms that can be employed for passing-through control: leader-follower formation control, multi-robot trajectory planning, control-based methods, and virtual tube planning and control. Furthermore, we conduct a comparative analysis of these techniques and provide some subjective and general evaluations.
Distributed Control within a Trapezoid Virtual Tube Containing Obstacles for UAV Swarm Subject to Speed Constraints
Dec 24, 2022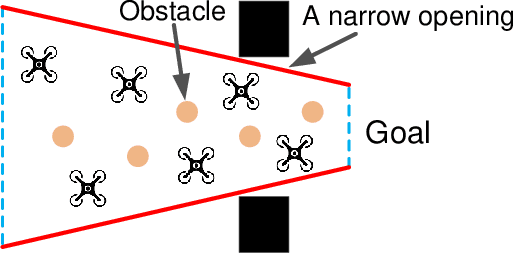
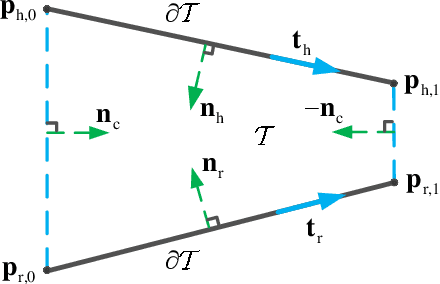
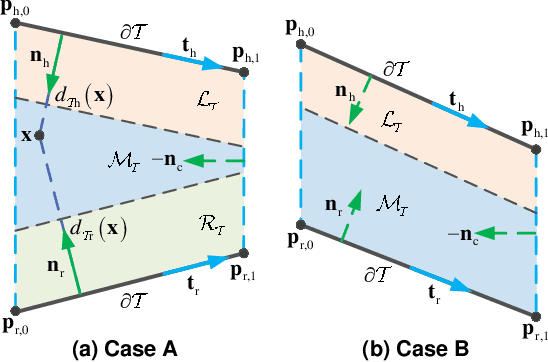
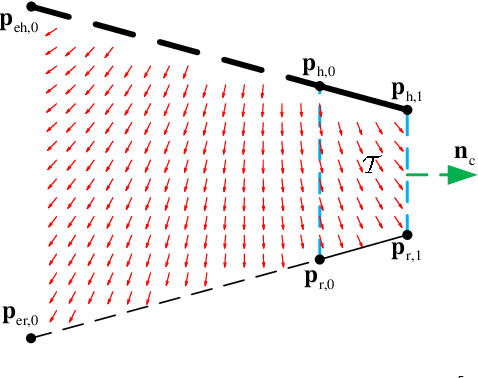
For guiding the UAV swarm to pass through narrow openings, a trapezoid virtual tube is designed in our previous work. In this paper, we generalize its application range to the condition that there exist obstacles inside the trapezoid virtual tube and UAVs have strict speed constraints. First, a distributed vector field controller is proposed for the trapezoid virtual tube with no obstacle inside. The relationship between the trapezoid virtual tube and the speed constraints is also presented. Then, a switching logic for the obstacle avoidance is put forward. The key point is to divide the trapezoid virtual tube containing obstacles into several sub trapezoid virtual tubes with no obstacle inside. Formal analyses and proofs are made to show that all UAVs are able to pass through the trapezoid virtual tube safely. Besides, the effectiveness of the proposed method is validated by numerical simulations and real experiments.
Distributed Control for a Multi-Agent System to Pass through a Connected Quadrangle Virtual Tube
Jul 14, 2022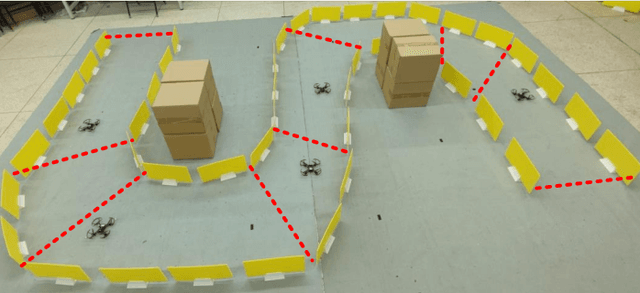
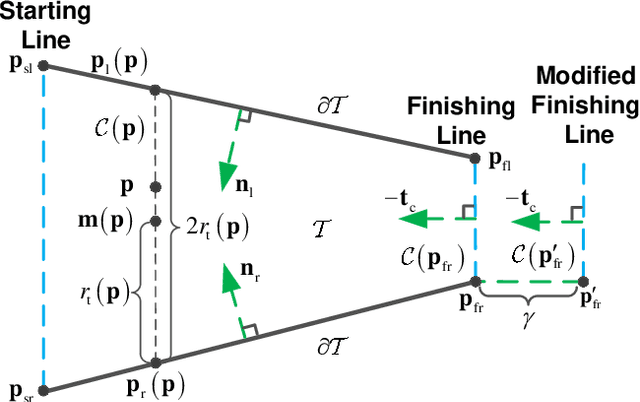
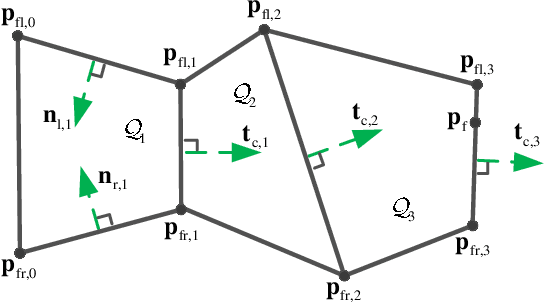
In order to guide the multi-agent system in a cluttered environment, a connected quadrangle virtual tube is designed for all agents to keep moving within it, whose basis is called the single trapezoid virtual tube. There is no obstacle inside the tube, namely the area inside the tube can be seen as a safety zone. Then, a distributed swarm controller is proposed for the single trapezoid virtual tube passing problem. This issue is resolved by a gradient vector field method with no local minima. Formal analyses and proofs are made to show that all agents are able to pass the single trapezoid virtual tube. Finally, a modified controller is put forward for convenience in practical use. For the connected quadrangle virtual tube, a modified switching logic is proposed to avoid the deadlock and prevent agents from moving outside the virtual tube. Finally, the effectiveness of the proposed method is validated by numerical simulations and real experiments.
Robust Distributed Control within a Curve Virtual Tube for a Robotic Swarm under Self-Localization Drift and Precise Relative Navigation
May 27, 2022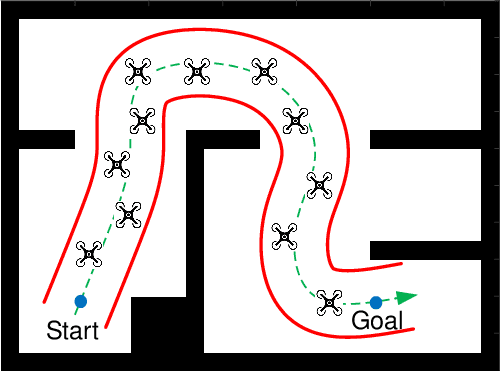
To guide the movement of a robotic swarm in a corridor-like environment, a curve virtual tube with no obstacle inside is designed in our previous work. This paper generalizes the controller design to the condition that all robots have self-localization drifts and precise relative navigation, where the flocking algorithm is introduced to reduce the negative impact of the self-localization drift. It is shown that the cohesion behavior and the velocity alignment behavior are able to reduce the influence of the position measurement drift and the velocity measurement error, respectively. For the convenience in practical use, a modified vector field controller with five control terms is put forward. Finally, the effectiveness of the proposed method is validated by numerical simulations and real experiments.
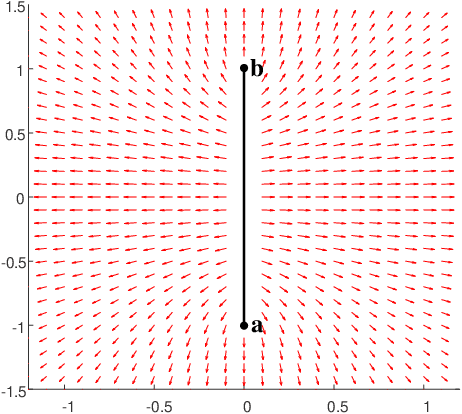
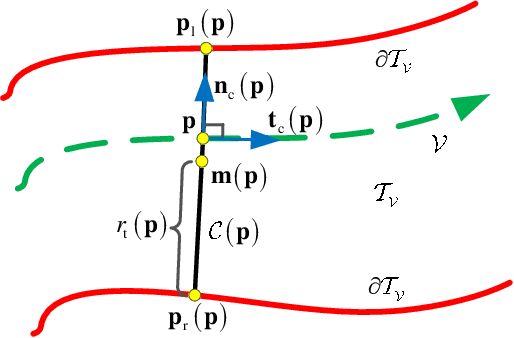
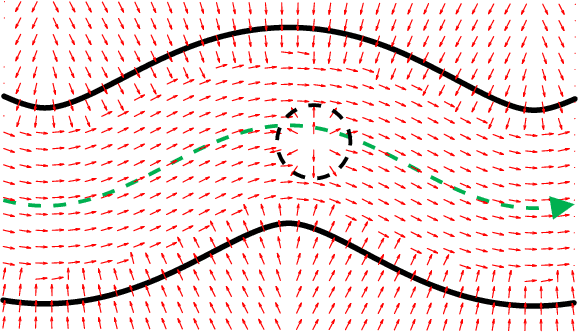
Distributed Control for a Robotic Swarm to Pass through a Curve Virtual Tube
Dec 02, 2021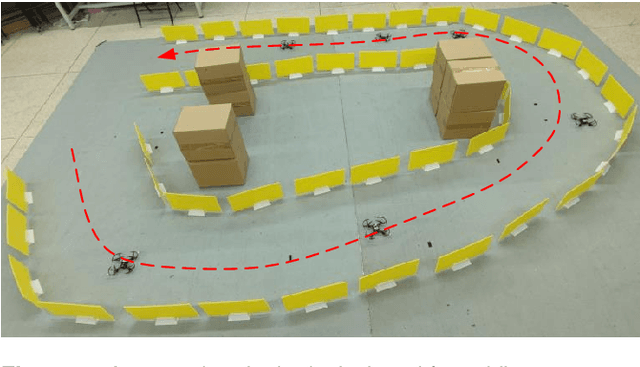
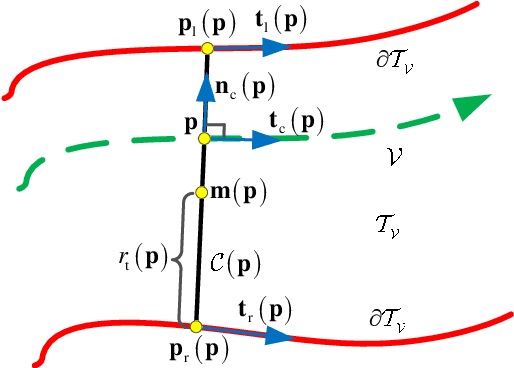
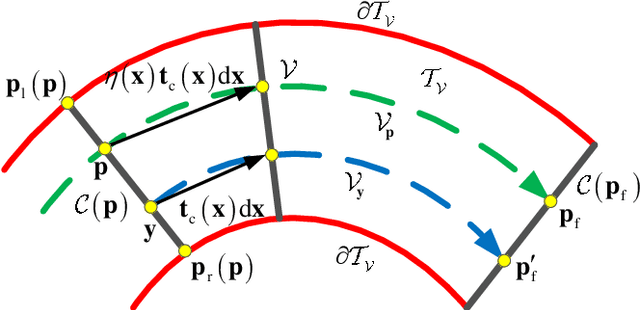
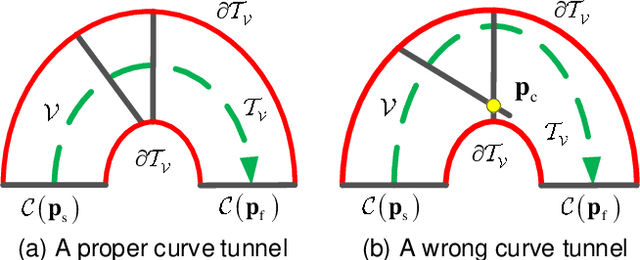
Robotic swarm systems are now becoming increasingly attractive for many challenging applications. The main task for any robot is to reach the destination while keeping a safe separation from other robots and obstacles. In many scenarios, robots need to move within a narrow corridor, through a window or a doorframe. In order to guide all robots to move in a cluttered environment, a curve virtual tube with no obstacle inside is carefully designed in this paper. There is no obstacle inside the tube, namely the area inside the tube can be seen as a safety zone. Then, a distributed swarm controller is proposed with three elaborate control terms: a line approaching term, a robot avoidance term and a tube keeping term. Formal analysis and proofs are made to show that the curve virtual tube passing problem can be solved in a finite time. For the convenience in practical use, a modified controller with an approximate control performance is put forward. Finally, the effectiveness of the proposed method is validated by numerical simulations and real experiments. To show the advantages of the proposed method, the comparison between our method and the control barrier function method is also presented in terms of calculation speed.